You might also like
- Automatic Target Recognition: Advances in Computer Vision Techniques for Target RecognitionFrom EverandAutomatic Target Recognition: Advances in Computer Vision Techniques for Target RecognitionNo ratings yet
- Final Year Project ReportDocument37 pagesFinal Year Project ReportMohd VohraNo ratings yet
- Autonomous Road Surveillance System: A Proposed Model For Vehicle Detection and Traffic Signal ControlDocument8 pagesAutonomous Road Surveillance System: A Proposed Model For Vehicle Detection and Traffic Signal ControlJulio CésarNo ratings yet
- Pedestrian Detection Based On Background Compensation With Block-Matching AlgorithmDocument5 pagesPedestrian Detection Based On Background Compensation With Block-Matching AlgorithmSoulayma GazzehNo ratings yet
- An Efficient Optimal Neural Network-Based Moving Vehicle Detection in Traffic Video Surveillance SystemDocument23 pagesAn Efficient Optimal Neural Network-Based Moving Vehicle Detection in Traffic Video Surveillance SystemRaja ChandruNo ratings yet
- Chapter One 1.1 Background of StudyDocument43 pagesChapter One 1.1 Background of Studyabdulazeez abubakarNo ratings yet
- Real-Time Detection of Vehicles Using The Haar-Like Features and Artificial Neuron NetworksDocument8 pagesReal-Time Detection of Vehicles Using The Haar-Like Features and Artificial Neuron NetworksAnonymous roFhLslwIFNo ratings yet
- Literature SurveyDocument7 pagesLiterature SurveyBalachandra MallyaNo ratings yet
- Ullah 2019Document6 pagesUllah 2019Dinar TASNo ratings yet
- Object Tracking For Autonomous Vehicles: Project ReportDocument12 pagesObject Tracking For Autonomous Vehicles: Project ReportFIRE OC GAMINGNo ratings yet
- Vehicle Counting For Traffic Management Using Opencv and PythonDocument8 pagesVehicle Counting For Traffic Management Using Opencv and PythonKalyani DarapaneniNo ratings yet
- Vehicle Detection and Tracking For Traffic ManagementDocument8 pagesVehicle Detection and Tracking For Traffic ManagementIAES IJAINo ratings yet
- Density Based Smart Traffic Control System Using Canny Edge DetectionDocument10 pagesDensity Based Smart Traffic Control System Using Canny Edge DetectionIJRASETPublicationsNo ratings yet
- 190 460 1 PBDocument9 pages190 460 1 PBAndra LuisNo ratings yet
- Article 2Document4 pagesArticle 2sandhyasbfcNo ratings yet
- A Real-Time Vision System For Nighttime Vehicle Detection and Traffic SurveillanceDocument15 pagesA Real-Time Vision System For Nighttime Vehicle Detection and Traffic SurveillancepritamNo ratings yet
- Computer Vision Techniques For Traffic Flow ComputDocument11 pagesComputer Vision Techniques For Traffic Flow Computharrouche riadhNo ratings yet
- Song2019 Article Vision-basedVehicleDetectionAnDocument16 pagesSong2019 Article Vision-basedVehicleDetectionAnCos ConsultancyNo ratings yet
- Video Based Detection of Vehicle For Traffic Surveillance System Using Edge DetectionDocument4 pagesVideo Based Detection of Vehicle For Traffic Surveillance System Using Edge DetectionInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Survey:: Control Using Deep LearningDocument5 pagesSurvey:: Control Using Deep LearningSourav KarmakarNo ratings yet
- Image Processing Based Vehicle Detection and Tracking MethodDocument5 pagesImage Processing Based Vehicle Detection and Tracking MethodPranjali SawantNo ratings yet
- Mahor ProjectDocument25 pagesMahor ProjectHaji MohammedNo ratings yet
- Dynamic Swarm Particle For Fast Motion Vehicle TrackingDocument13 pagesDynamic Swarm Particle For Fast Motion Vehicle Trackingrushendra.umbNo ratings yet
- 2017 Ieee Tits KuangDocument10 pages2017 Ieee Tits KuangWafa BenzaouiNo ratings yet
- Fuzzy LogicDocument51 pagesFuzzy LogicVinay KumarNo ratings yet
- Chairat Low Cost High Performance Automatic Motorcycle Helmet Violation Detection WACV 2020 PaperDocument9 pagesChairat Low Cost High Performance Automatic Motorcycle Helmet Violation Detection WACV 2020 PaperAntla SarfarazNo ratings yet
- Jih MSP 2012 03 005Document15 pagesJih MSP 2012 03 005DivyaSejekanNo ratings yet
- Smart Control of Traffic Using Artificial Intelligence: CE4098D Major Project - Part IDocument28 pagesSmart Control of Traffic Using Artificial Intelligence: CE4098D Major Project - Part IBhaskhar ReddyNo ratings yet
- An Embedded Computer Vision SysytemDocument20 pagesAn Embedded Computer Vision SysytemeviteNo ratings yet
- MULTIPLE - OBJECT - TRACKING - 01fe20bei046Document6 pagesMULTIPLE - OBJECT - TRACKING - 01fe20bei046ramakrishnasj55No ratings yet
- An Implementation of Moving Object Detection, Tracking and Counting Objects For Traffic Surveillance SystemDocument6 pagesAn Implementation of Moving Object Detection, Tracking and Counting Objects For Traffic Surveillance Systematdeen sNo ratings yet
- Pretrained Vehicle ClassifierDocument11 pagesPretrained Vehicle ClassifierSuvramalya BasakNo ratings yet
- Object Detection and Tracking Algorithms For Vehicle Counting: A Comparative AnalysisDocument11 pagesObject Detection and Tracking Algorithms For Vehicle Counting: A Comparative Analysisnaresh tinnaluriNo ratings yet
- Fuzzy Logic Approach For Detecting Drivers - Drowsiness Based On Image Processing and Video StreamingDocument13 pagesFuzzy Logic Approach For Detecting Drivers - Drowsiness Based On Image Processing and Video StreamingChadalavada Mohansai KumarNo ratings yet
- Application of Various Deep Learning Models For Automatic Traffic Violation Detection Using Edge ComputingDocument11 pagesApplication of Various Deep Learning Models For Automatic Traffic Violation Detection Using Edge ComputingijitcsNo ratings yet
- Real-Time Video Surveillance System For Traffic MaDocument10 pagesReal-Time Video Surveillance System For Traffic MaWelleah Mae T. LacsonNo ratings yet
- Smart Traffic Management System Using Machine LearningDocument12 pagesSmart Traffic Management System Using Machine LearningVedant AgrawalNo ratings yet
- Conference PaperDocument4 pagesConference PaperHelenaNo ratings yet
- Image Processing: Object Tracking With Color DetectionDocument14 pagesImage Processing: Object Tracking With Color DetectionAyush MariaNo ratings yet
- Ijcatr 03051001Document7 pagesIjcatr 03051001ATSNo ratings yet
- Vehicle Tracking and Classification in Challenging Scenarios Via Slice SamplingDocument17 pagesVehicle Tracking and Classification in Challenging Scenarios Via Slice SamplingYaste YastawiqalNo ratings yet
- Article 3Document21 pagesArticle 3sandhyasbfcNo ratings yet
- A Real-Time Vehicle Counting, Speed Estimation, and Classification System Based On Virtual Detection Zone and YOLODocument10 pagesA Real-Time Vehicle Counting, Speed Estimation, and Classification System Based On Virtual Detection Zone and YOLOmanuel contrerasNo ratings yet
- Computer Vision Research StatementDocument5 pagesComputer Vision Research StatementJulio CalvoNo ratings yet
- Moving Object Tracking and Detection in Videos Using MATLAB: A ReviewDocument9 pagesMoving Object Tracking and Detection in Videos Using MATLAB: A ReviewAkhirul HajriNo ratings yet
- Motion Object Detector With Higher Detection LevelsDocument4 pagesMotion Object Detector With Higher Detection Levelssurendiran123No ratings yet
- Density Based Traffic Control System Using Image Processing: November 2018Document5 pagesDensity Based Traffic Control System Using Image Processing: November 2018kota naikNo ratings yet
- Image Processing Application For Vehicle Seat Vacancy IdentificationDocument5 pagesImage Processing Application For Vehicle Seat Vacancy IdentificationEditor IJTSRDNo ratings yet
- Virtual Traffic Light SynopsisDocument11 pagesVirtual Traffic Light SynopsisRITIKNo ratings yet
- Human Fall Detection Using Optical Flow Farne BackDocument15 pagesHuman Fall Detection Using Optical Flow Farne Backkandulaanusha20No ratings yet
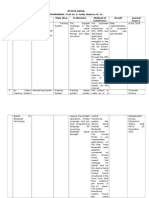
- N o Title Author Main Idea Problem(s) Method of Solution(s) Result Journal SourceDocument8 pagesN o Title Author Main Idea Problem(s) Method of Solution(s) Result Journal SourceImam FadliNo ratings yet
- A Real-Time System For Vehicle Detection With Shadow Removal and Vehicle Classification Based On Vehicle Features at Urban RoadsDocument8 pagesA Real-Time System For Vehicle Detection With Shadow Removal and Vehicle Classification Based On Vehicle Features at Urban RoadsazedNo ratings yet
- Tracking and Counting of Vehicles For Flow Analysis From Urban Traffic VideosDocument6 pagesTracking and Counting of Vehicles For Flow Analysis From Urban Traffic VideosjuampicNo ratings yet
- PHD Research Proposal of Waqar Baig PDFDocument11 pagesPHD Research Proposal of Waqar Baig PDFSajid GhanghroNo ratings yet
- (IJCST-V10I3P21) :pratheesh S, Suraj Gowda K T, Sumanth C M, Ullaskumar K, YashavantDocument3 pages(IJCST-V10I3P21) :pratheesh S, Suraj Gowda K T, Sumanth C M, Ullaskumar K, YashavantEighthSenseGroupNo ratings yet
- TLC Using VHDLDocument30 pagesTLC Using VHDLnaren_cool05No ratings yet
- Traffic Light Detection and Recognition For Autonomous Vehicles PDFDocument7 pagesTraffic Light Detection and Recognition For Autonomous Vehicles PDFAnthony Soares de AlencarNo ratings yet
- Traffic Surveillance System For Vehicle Detection Using Discrete Wavelet TransformDocument13 pagesTraffic Surveillance System For Vehicle Detection Using Discrete Wavelet TransformFatima Azahrae NamossNo ratings yet
- A) Problem StatementDocument8 pagesA) Problem StatementRAKSHIT VELNo ratings yet
- 10 Detection of Signals in NoiseDocument20 pages10 Detection of Signals in NoisekirankumarrathNo ratings yet
- 10th Class-Maths Text Book-NewDocument400 pages10th Class-Maths Text Book-NewVishnu Muddasani100% (1)
- Smart Four Channel Highside Power Switch: BTS711L1Document17 pagesSmart Four Channel Highside Power Switch: BTS711L1Giapy Phuc TranNo ratings yet
- Seizmic Design of RE WallsDocument49 pagesSeizmic Design of RE Wallsljubomirjocic@yahoo.com100% (1)
- PL-SQL FunctionsDocument130 pagesPL-SQL Functionswasim ahmed100% (1)
- RRU5909 Technical SpecificationsDocument7 pagesRRU5909 Technical SpecificationsDmitry059100% (1)
- On Predicting Roller Milling Performance Part II. The Breakage FunctionDocument13 pagesOn Predicting Roller Milling Performance Part II. The Breakage FunctionKenneth AdamsNo ratings yet
- Inertia FormulasDocument4 pagesInertia FormulasLoysa Agtarap MataNo ratings yet
- Actor-Network Theory and After - Jonh Law and John HassardDocument14 pagesActor-Network Theory and After - Jonh Law and John HassardGabriel RomanNo ratings yet
- Maths Project: Made By:-Shubham Class: - Viii-CDocument25 pagesMaths Project: Made By:-Shubham Class: - Viii-CsivaNo ratings yet
- SMAC Actuators User ManualDocument52 pagesSMAC Actuators User ManualGabo DuarNo ratings yet
- Software Development Kit 2.1 Programmer's Guide 2.1: Cell Broadband EngineDocument82 pagesSoftware Development Kit 2.1 Programmer's Guide 2.1: Cell Broadband EnginemathurvaibhavNo ratings yet
- Summative Test Ist (2nd G)Document2 pagesSummative Test Ist (2nd G)Rosell CabalzaNo ratings yet
- Chapter 3Document21 pagesChapter 3aloneirNo ratings yet
- PDS Example Collection 24-01-11 - Open PDFDocument52 pagesPDS Example Collection 24-01-11 - Open PDFMichael GarrisonNo ratings yet
- Supertester 680 RDocument39 pagesSupertester 680 Rdomingos.sanchezNo ratings yet
- Created by C. Mani, Education Officer, KVS RO Silchar: ST ND RD ST ND RD ST ND RDDocument51 pagesCreated by C. Mani, Education Officer, KVS RO Silchar: ST ND RD ST ND RD ST ND RDjaindevansh100% (2)
- ATV13 User Manual VECON PDFDocument126 pagesATV13 User Manual VECON PDFSuleyman OzyurtNo ratings yet
- Radionics PatentsDocument112 pagesRadionics Patentschad ballNo ratings yet
- Airbus A319/320/321 Notes: Welcome To The Airbus! Resistance Is Futile, You Will Be AssimilatedDocument128 pagesAirbus A319/320/321 Notes: Welcome To The Airbus! Resistance Is Futile, You Will Be Assimilatedejt01No ratings yet
- 2 0 Tdi SSPDocument90 pages2 0 Tdi SSPmicol53100% (1)
- KW Kwh/YrDocument3 pagesKW Kwh/YrHaris BaigNo ratings yet
- Engine Overhaul : Group 11BDocument80 pagesEngine Overhaul : Group 11BДмитрий100% (1)
- ACT Geometry - PolygonsDocument8 pagesACT Geometry - PolygonsaftabNo ratings yet
- Operation & Maintenance: A160-Om-C-May15Document66 pagesOperation & Maintenance: A160-Om-C-May15Thomas AliNo ratings yet
- QT 5 Inferential Chi SquareDocument23 pagesQT 5 Inferential Chi SquareSaad MasoodNo ratings yet
- OneTen-Frontend Web Development FundamentalsDocument5 pagesOneTen-Frontend Web Development FundamentalsOkpetah Chioma christabelNo ratings yet
- Hot-Forged 6082 Suspension PartsDocument13 pagesHot-Forged 6082 Suspension Partsfkaram1965No ratings yet
- Chapter 11 - SkullDocument10 pagesChapter 11 - Skullwamaithamargaret257No ratings yet
- B.S. in Electronics Engineering - BSECE 2008 - 2009Document2 pagesB.S. in Electronics Engineering - BSECE 2008 - 2009Vallar RussNo ratings yet