International Journal of Scientific Research Engineering & Technology (IJSRET), ISSN 2278 0882
Volume 3, Issue 2, May 2014
Modifications done in Ant Colony Algorithm for its application to PID
Controller Parameters Optimization
1
2
Samarth Singh 1, R. Mitra 2
Department of Electronics and Communication Engineering, Indian Institute of Technology, Roorkee, India
Department of Electronics and Communication Engineering, Indian Institute of Technology, Roorkee, India
ABSTRACT
Ant Colony Algorithm is an algorithm used for obtaining
optimized cost solutions for graphical problems. This
paper deals with modifications done in this algorithm
and uses it for finding optimal values of PID controller
parameters. These modifications are actually the
solutions to the problems that were encountered while
implementing this algorithm on PID controller.
Modifications done to this algorithm provided better
results as compared to the simplified version of the
algorithm, in terms of lesser number of iterations taken
to reach optimal solution, along with improvement in the
response obtained. The results have been obtained by
making use of MATLAB simulations.
they have higher tendency (or probability) to follow that
path which has higher deposition of pheromone.
Keywords: Ant Colony Algorithm, modifications, PID
controller, iterations, MATLAB.
I.
INTRODUCTION
Ants are creatures which as individuals are quite simple,
but collectively they are known for their complex social
behavior in terms of gathering food. Due to this behavior
ants are able to find the shortest path from their nest to
the food source. Studies were conducted in the early 90's
on their food gathering mechanisms and the result of
these studies was the Ant Colony Algorithm [1].
Since then it has been applied in numerous fields for
optimization purposes. It is basically a probabilistic
technique used for finding shortest path in graphs. A
number of artificial ants build solutions for a certain
optimization problem and exchange information about
the quality of these solutions making allusion to the
communication systems of the real ants [1]. This
exchange of information is done by the means of a
chemical known as pheromone, towards which ants are
highly responsive [1] [2].
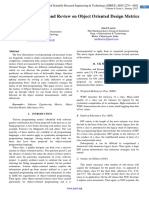
II. FOOD GATHERING BEHAVIOR OF
ANTS IN BRIEF
Fig 1. Shows sequentially how ants gather food in a
simplified manner. Starting from the top of the figure we
can say that six ants are about to leave the ant nest for
gathering food. It is clear from the figure that there are
two paths available towards the food source, one is the
shorter one the other is the longer one. Now ants release
the chemical pheromone as they travel, along with this
Fig 1. Food gathering mechanism of ants.
So initially as there is no deposition of pheromone on
any of the paths, so there ants have 50-50 probability to
follow any of the two paths. However ants on the shorter
path will reach the food source first and also return back
to the nest fast, hence pheromone deposition on shorter
path would be higher as compared to the longer path. At
www.ijsret.org
225
International Journal of Scientific Research Engineering & Technology (IJSRET), ISSN 2278 0882
Volume 3, Issue 2, May 2014
this point of time, Any other ant ready to gather food
would thus have higher tendency to follow shorter path
as compared to the longer path . Pheromone also decays
with time. After a long period of time almost all the ants
would follow the shorter path, thereby optimizing their
path from the nest towards the food source.
III. ANT COLONY ALGORITHM
1. Define objective function as:
2.
3.
4.
5.
where Q is a constant and ISE is Integral Square of
Error.
Discritize all the parameters that are to be optimized.
Decide the maximum number of iterations, number of
ants in the nest, path tables for each ant, pheromone
tables and optimal path table.
Set a counter equal to 0 and begin algorithm.
For each ant find the transitional probability to each
node as it travel along a particular path.
where
P
:Probability of kth ant going from source node s
to destination node d.
6. After probabilities found out let ants travel and store
their path in respective path tables. From this find
objective function value for each ant.
7. At the end of iteration update the pheromone
deposition at each node from the following:
Along with this increment the counter
8. End the algorithm if either all the ants start to follow
a single path or the counter achieves maximum value
of iterations. Else go to step 5.
Algorithm has been developed using [1] [2][3][4][5]
IV.
MODIFICATIONS DONE IN ANT
COLONY ALGORITHM AND RESULTS
A.
Deposition of pheromone on optimal nodes
It is known that the pheromone deposition on each node
is proportional to the value of objective function
obtained at the end of iteration for each path ants have
travelled for this iteration. The objective function is in
fact inversely proportional to ISE (Integral Square of
Error) [4][5]. Suppose the most optimal path was found
during the second or higher iteration, then the ants would
not settle to the new found optimal path because the
optimal path obtained from previous iterations will have
significant deposition of pheromone on it. From
simulation results it was seen that, although we did found
out the most optimal path but it took significant number
or in most cases maximum number of iterations for all
the ants to settle on it.
We know that at the end of every iteration ,the
pheromone deposition on every node gets updated.
Based on the ISE value, obtained for a particular path,
this update takes place [4][5]. So in order to save time
what we can do is that at the end of each iteration we can
increment the pheromone deposition by certain factor on
the nodes of the most optimal path. Along with this we
need to define a pre optimal path, which we can say that
it was the optimal path in the previous iterations, at the
end of each iteration reduce its pheromone contents by
certain large factor so that the probability of ants
following that path decrease or in other words we are
increasing the probability of rejecting this pre optimal
path and increasing the probability of settling of all the
ants on the optimal path.
At the end of iteration let
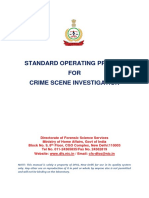
The figure 2, figure 3 and figure 4 shows values of
pheromone at various nodes for the three controller
parameters at the termination of the algorithm, whose
optimal values are being found out. We see that
significant and considerable deposition on several nodes
other than the optimal nodes( optimal nodes in above
case are Kp=2.5, Ki=1.2, Kd=2.9) in case of Kp, nodes
other than optimal one have more pheromone deposition
, thus this can cause the algorithm to not converge
immediately to optimal solution.
www.ijsret.org
226
International Journal of Scientific Research Engineering & Technology (IJSRET), ISSN 2278 0882
Volume 3, Issue 2, May 2014
After making use of the offered solution the result that
we got can be seen from fig 5, fig 6 and fig 7. the
optimal nodes here are Kp=2.5 ,Ki=1.1 ,Kd=3. From the
above figures we can say that the deposition on optimal
nodes is significantly high as compared to other nodes.
Greater the deposition of pheromone on a path, greater
will be the ants probability to follow that path. So the
ants can easily converge to the optimal solution. This can
also be seen from table 1.
Fig 5. Pheromone deposition on each Ki node (after
modification)
Fig 2. Pheromone deposition on each Ki node (without
modification)
Fig 6. Pheromone deposition on each Kp node (after
modification)
Fig 3. Pheromone deposition on each Kp node (without
modification)
Fig 7. Pheromone deposition on each Kd node (after
modification)
Fig 4. Pheromone deposition for each Kd node (without
modification)
For the same system, the Ant Colony Algorithm was run
10 times for original algorithm and 10 times after
modification to see whether the algorithm is terminating
or not with modification. The above results also conform
that the solution proposed is giving us an early
termination to the algorithm.
www.ijsret.org
227
International Journal of Scientific Research Engineering & Technology (IJSRET), ISSN 2278 0882
Volume 3, Issue 2, May 2014
TABLE 1: Showing number of iterations taken using
with and without modification to find optimal
solution.
After
modification
1
2
3
4
5
6
7
8
9
10
6
10(max)
10(max)
10(max)
10(max)
10(max)
10(max)
10(max)
9
10(max)
5
8
10(max)
4
6
5
4
5
5
4
1.2
1
Response
Original
1.4
0.8
0.6
0.4
0.2
0
0
2000
4000
6000
8000
Time(.003 secs)
10000
12000
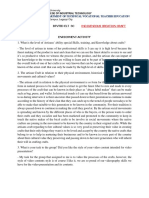
Fig 8. Response for without modified objective function
1.4
1.2
B. MODIFICATION IN OBJECTIVE FUNCTION
For any path to be accepted or rejected for being the
most optimal one, depends on the objective
function(inversely proportional to ISE) value obtained
for that path, The logic of this algorithm allows that path
to be chosen which has the least ISE value[4][5]. To
obtain the desired response, it sometimes becomes
necessary to make modifications in the objective
function. One of the major problems that was
encountered was when the offline tuning of scaling
factors of Fuzzy supervised PID for a third order system
was done through the algorithm. The response obtained
is of fashion as shown in figure.
The initial oscillations in the response are undesirable as
can be seen from the figure 8, although best possible ISE
has been obtained for this response. The undesirability is
due to the fact that such sudden and large oscillations can
damage the actuator. To reduce these oscillations we
need to modify the objective function so that such tuned
values can completely be rejected while the algorithm is
being proceeded.
In the algorithm we are actually storing the values of the
error at each sampling instant in an array. Here
modification done was that for each sampling instant and
a future sampling instant (+1 sec and +2 sec) was taken
into consideration, the difference between the values of
output for both of these time instants must be less than
0.2(taking into assumption a value less than or equal to
0.2 is desirable). If this condition is not true the
algorithm immediately rejects that path. This is done by
putting ISE value for that path very large forcefully. The
reason the future sampling instant was taken at +1 and
+2 sec is that the time difference in occurrence of crest
and trough was around 1 to 2 seconds which can be seen
from the response.
This resulted in getting a response with significantly less
oscillatory behavior in the transient section of the
1
Response
S.no
response as can be seen from fig 9. Thus giving us
desirable response.
0.8
0.6
0.4
0.2
0
0
2000
4000
6000
8000
Time(.003sec)
10000
12000
Fig 9. Response with modification in objective function
VI. CONCLUSION
In this paper it can be said that the problems were
encountered while implementation of Ant Colony
Algorithm, in the form of large number of iterations and
improper response, so suitable modifications were done
in the algorithm so as to get proper results.
[1]
[2]
[3]
[4]
[5]
REFERENCES
Marco Dorigo, Thomas Stutzle," Ant Colony
Optimization", A Bradford Book The MIT Press
Cambridge, Massachusetts London, England 2004.
Marco Dorigo, Luca Maria Gambardella, "Ant Colony
System: A Cooperative Learning Approach to the
Travelling Salesman Problem" ,Accepted for publication
in the IEEE Transactions on Evolutionary Computation,
Vol.1, No.1, 1997.PP 1-21.
Oscar Castillo, Witold Pedrycz, and Janusz Kacprzyk
,"Evolutionary Design of Intelligent Systems in
Modelling, Simulation and Control", Springer-Verlag
Berlin Heidelberg 2009. pp.3-16.
R. Mitra, Samarth Singh, "Optimal Fuzzy Supervised PID
Controller using Ant Colony Optimization Algorithm" ,
published in International Journal of Advance in
Electronic and Electric Engineering, Research India
Publication, vol 3, No.5. pp.543-550.
Yongsheng Zhao, Baoying Li "A New Method for
Optimizing Fuzzy Membership Function", Proceedings of
the 2007 IEEE International Conference on Mechatronics
and Automation, 2007, Harbin, China. pp. 674-678.
www.ijsret.org
228
You might also like
- Consruction of A Direct Solar Dryer For Perishable Farm ProductsDocument9 pagesConsruction of A Direct Solar Dryer For Perishable Farm ProductsijsretNo ratings yet
- Thermal Analysis On Characterization of Polycaprolactone (PCL) - Chitosan Scaffold For Tissue EngineeringDocument5 pagesThermal Analysis On Characterization of Polycaprolactone (PCL) - Chitosan Scaffold For Tissue Engineeringijsret100% (1)
- Comparative Study and Review On Object Oriented Design MetricsDocument4 pagesComparative Study and Review On Object Oriented Design MetricsijsretNo ratings yet
- A Review On Natural Fibre Polymer CompositesDocument6 pagesA Review On Natural Fibre Polymer CompositesijsretNo ratings yet
- CHANGES IN ANTI OXIDANT ENZYME ACTIVITIES IN Pseudomonas Syringae PV Syringae (BACTERIAL BROWN SPOT) INFECTED SEEDLINGS OF Vigna Radiata L.Document5 pagesCHANGES IN ANTI OXIDANT ENZYME ACTIVITIES IN Pseudomonas Syringae PV Syringae (BACTERIAL BROWN SPOT) INFECTED SEEDLINGS OF Vigna Radiata L.ijsretNo ratings yet
- A Distinct Method To Find The Critical Path and Total Float Under Fuzzy EnvironmentDocument5 pagesA Distinct Method To Find The Critical Path and Total Float Under Fuzzy EnvironmentijsretNo ratings yet
- Comparative Study and Review On Object Oriented Design MetricsDocument4 pagesComparative Study and Review On Object Oriented Design MetricsijsretNo ratings yet
- A Review On Fingerprint Detection and Recognization TechniquesDocument4 pagesA Review On Fingerprint Detection and Recognization TechniquesijsretNo ratings yet
- Mechanical and Fracture Toughness Analysis of Woven Carbon Fibre Reinforced Epoxy CompositesDocument6 pagesMechanical and Fracture Toughness Analysis of Woven Carbon Fibre Reinforced Epoxy CompositesijsretNo ratings yet
- Echo Cancellation System in VOIP Using MATLABDocument3 pagesEcho Cancellation System in VOIP Using MATLABijsretNo ratings yet
- Blending Behavior of Cotton and Polyester Fibers On Different Spinning Systems in Relation To Physical Properties of Blended YarnsDocument11 pagesBlending Behavior of Cotton and Polyester Fibers On Different Spinning Systems in Relation To Physical Properties of Blended YarnsijsretNo ratings yet
- Heat Transfer Behaviors in A Parabolic Trough Solar Collector Tube With Compound TechniqueDocument8 pagesHeat Transfer Behaviors in A Parabolic Trough Solar Collector Tube With Compound TechniqueijsretNo ratings yet
- Content Based Image Retrieval Using Color FeatureDocument6 pagesContent Based Image Retrieval Using Color FeatureijsretNo ratings yet
- Comparison of Workpiece Geometry and Its Effects On ECAP Process by FEADocument5 pagesComparison of Workpiece Geometry and Its Effects On ECAP Process by FEAijsretNo ratings yet
- Strategies of Effective Teaching and Learning Practical Skills in Technical and Vocational Training Programmes in NigeriaDocument6 pagesStrategies of Effective Teaching and Learning Practical Skills in Technical and Vocational Training Programmes in NigeriaijsretNo ratings yet
- Treatment of Dairy Waste Water Using Low Cost AdsorbentsDocument2 pagesTreatment of Dairy Waste Water Using Low Cost AdsorbentsijsretNo ratings yet
- Energy Production in Public Transport Using Piezoelectric MaterialDocument4 pagesEnergy Production in Public Transport Using Piezoelectric MaterialijsretNo ratings yet
- Removal of Reactive Dye From Aqueous Solutions Using Orange and Lemon Peel As Bio - AdsorbentDocument8 pagesRemoval of Reactive Dye From Aqueous Solutions Using Orange and Lemon Peel As Bio - AdsorbentijsretNo ratings yet
- Application of Modified Euler's Method in Obtaining Numerical Solution of Swing EquationDocument7 pagesApplication of Modified Euler's Method in Obtaining Numerical Solution of Swing Equationijsret100% (1)
- A Review On Ash Agglomeration Phenomenon in Fluidised Bed Combustion BoilerDocument9 pagesA Review On Ash Agglomeration Phenomenon in Fluidised Bed Combustion BoilerijsretNo ratings yet
- Compact Printed Dipole Antenna With Low Return Loss and VSWRDocument2 pagesCompact Printed Dipole Antenna With Low Return Loss and VSWRijsretNo ratings yet
- E-Readiness Assessment: A Standard To Uplift Digital India ProgramDocument5 pagesE-Readiness Assessment: A Standard To Uplift Digital India ProgramijsretNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- SPQRDocument8 pagesSPQRCamilo PeraltaNo ratings yet
- Applied Mechanics-Statics III PDFDocument24 pagesApplied Mechanics-Statics III PDFTasha ANo ratings yet
- Strategic Risk ManagementDocument46 pagesStrategic Risk ManagementNuman Rox100% (1)
- MGT501 Final Term MCQs + SubjectiveDocument33 pagesMGT501 Final Term MCQs + SubjectiveAyesha Abdullah100% (1)
- Crime Scene Manual FullDocument19 pagesCrime Scene Manual FullMuhammed MUZZAMMILNo ratings yet
- Final Box Design Prog.Document61 pagesFinal Box Design Prog.afifa kausarNo ratings yet
- Bgs Chapter 2Document33 pagesBgs Chapter 2KiranShettyNo ratings yet
- Literature Review On Catfish ProductionDocument5 pagesLiterature Review On Catfish Productionafmzyodduapftb100% (1)
- Modern DrmaDocument7 pagesModern DrmaSHOAIBNo ratings yet
- Artemis - Star+Wars+VolatilityDocument7 pagesArtemis - Star+Wars+VolatilityjacekNo ratings yet
- Distributing Business Partner Master Data From SAP CRMDocument28 pagesDistributing Business Partner Master Data From SAP CRMJarko RozemondNo ratings yet
- Department of Education: Republic of The PhilippinesDocument2 pagesDepartment of Education: Republic of The PhilippinesShailac RodelasNo ratings yet
- Approaches To Violence in IndiaDocument17 pagesApproaches To Violence in IndiaDeepa BhatiaNo ratings yet
- Ma HakalaDocument3 pagesMa HakalaDiana Marcela López CubillosNo ratings yet
- Far Eastern University-Institute of Nursing In-House NursingDocument25 pagesFar Eastern University-Institute of Nursing In-House Nursingjonasdelacruz1111No ratings yet
- 201606300437271127888362list of Prescribed Textbooks ISC 2017 PDFDocument10 pages201606300437271127888362list of Prescribed Textbooks ISC 2017 PDFShrimanta SatpatiNo ratings yet
- MSDS PetrolDocument13 pagesMSDS PetrolazlanNo ratings yet
- Aff Col MA Part IIDocument90 pagesAff Col MA Part IIAkanksha DubeyNo ratings yet
- Designing A Peace Building InfrastructureDocument253 pagesDesigning A Peace Building InfrastructureAditya SinghNo ratings yet
- Sucesos de Las Islas Filipinas PPT Content - Carlos 1Document2 pagesSucesos de Las Islas Filipinas PPT Content - Carlos 1A Mi YaNo ratings yet
- Ottley Sandra 2009Document285 pagesOttley Sandra 2009Lucas Fariña AlheirosNo ratings yet
- Teuku Tahlil Prosiding38491Document30 pagesTeuku Tahlil Prosiding38491unosa unounoNo ratings yet
- Icc Enrichment AcitivityDocument2 pagesIcc Enrichment AcitivityDan Rey Miras MiñaNo ratings yet
- Peter Lehr Militant Buddhism The Rise of Religious Violence in Sri Lanka Myanmar and Thailand Springer International PDFDocument305 pagesPeter Lehr Militant Buddhism The Rise of Religious Violence in Sri Lanka Myanmar and Thailand Springer International PDFIloviaaya RegitaNo ratings yet
- Saxonville CaseDocument2 pagesSaxonville Casel103m393No ratings yet
- Understanding Ui-Ux-By Harry Muksit - SDocument109 pagesUnderstanding Ui-Ux-By Harry Muksit - Sgodzalli44100% (1)
- DELA CRUZ - LAC 1 - 002 - Individual Learning Monitoring Plan - Bugtongnapulo INHSDocument2 pagesDELA CRUZ - LAC 1 - 002 - Individual Learning Monitoring Plan - Bugtongnapulo INHSGilbert Dela CruzNo ratings yet
- Coronally Advanced Flap With Connective Tissue GraDocument13 pagesCoronally Advanced Flap With Connective Tissue GrasutriNo ratings yet
- Music 20 Century: What You Need To Know?Document8 pagesMusic 20 Century: What You Need To Know?Reinrick MejicoNo ratings yet
- Multicutural LiteracyDocument3 pagesMulticutural LiteracyMark Alfred AlemanNo ratings yet