You might also like
- Instrumentación SismicaDocument10 pagesInstrumentación SismicagibranNo ratings yet
- Tesis La Instrumentación Sísmica en México PDFDocument95 pagesTesis La Instrumentación Sísmica en México PDFJefferson Gutierritos YakitoryNo ratings yet
- Aplicaciones de Los Metodos NumericosDocument6 pagesAplicaciones de Los Metodos NumericosCarlos Alberto VanegasNo ratings yet
- Método de Heun Comparado Con Otros Métodos Numéricos en MATLABDocument3 pagesMétodo de Heun Comparado Con Otros Métodos Numéricos en MATLABAngie Rosseth Valencia Sagobal100% (1)
- Mapa Conceptual MetodosDocument2 pagesMapa Conceptual MetodosXavier Alexis Cortes VillalobosNo ratings yet
- TP4 2006 PDFDocument8 pagesTP4 2006 PDFhejuradoNo ratings yet
- Distr Normal Prba NormalidadDocument14 pagesDistr Normal Prba NormalidadManuel Alejandro Cordero PenagosNo ratings yet
- Metodos Numericos en MatlabDocument10 pagesMetodos Numericos en Matlabßräyän Nðnð FichüNo ratings yet
- Algebra LinealDocument96 pagesAlgebra LinealMarlon CastroNo ratings yet
- Practica 2 Metodos Numericos FIIEDocument3 pagesPractica 2 Metodos Numericos FIIElizethlslibraNo ratings yet
- Clase 4 BDocument11 pagesClase 4 BEmilioMadaraNo ratings yet
- 13 10 SAGE Enl EjerciciosDocument4 pages13 10 SAGE Enl EjerciciosManuel LucasNo ratings yet
- Analisis Numerico para EstadisticaDocument3 pagesAnalisis Numerico para EstadisticaLuisFelipeUNINo ratings yet
- Técnicas de integración: cambio de variable, integración por partes y fracciones racionalesDocument43 pagesTécnicas de integración: cambio de variable, integración por partes y fracciones racionalesdarkfenyx69No ratings yet
- Clase 1 - Intro Matlab PDFDocument61 pagesClase 1 - Intro Matlab PDFMateo Felipe Ramirez ArbelaezNo ratings yet
- Apuntes de Cálculo Multivariable (Apuntes) - Word 97-2003Document58 pagesApuntes de Cálculo Multivariable (Apuntes) - Word 97-2003Alexandro CuevasNo ratings yet
- Interpolación Lagrange MATLABDocument4 pagesInterpolación Lagrange MATLABDAVID ALEXANDER LUCERO AGUIRRENo ratings yet
- MétodosOSRDocument8 pagesMétodosOSRjohezbNo ratings yet
- MNUMv 1Document47 pagesMNUMv 1Adhemar MizushimaNo ratings yet
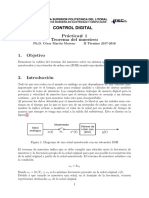
- Control Digital Sim1Document7 pagesControl Digital Sim1Andres Ante VargasNo ratings yet
- Demostraciones Algebra Lineal PDFDocument4 pagesDemostraciones Algebra Lineal PDFBryan Steve PichuchoNo ratings yet
- Aplicación de Arboles de PRIM y KruskalDocument7 pagesAplicación de Arboles de PRIM y KruskalManuel PeñalozaNo ratings yet
- Notas 05 - 065 Complete PDFDocument477 pagesNotas 05 - 065 Complete PDFAlexander Lozano CernaNo ratings yet
- Clase de Analisis Numerico 2015 - II (2788)Document26 pagesClase de Analisis Numerico 2015 - II (2788)Lincol Herrera ParionaNo ratings yet
- Métodos numéricos para derivación e integraciónDocument5 pagesMétodos numéricos para derivación e integraciónkevin trujilloNo ratings yet
- GoldbergDocument3 pagesGoldbergLuis Toro FloresNo ratings yet
- Antologia de Metodos NumericosDocument22 pagesAntologia de Metodos NumericosFrancisco Bautista Rocha100% (1)
- Simulacion de Sistemas Dinamicos Con SimulinkDocument40 pagesSimulacion de Sistemas Dinamicos Con Simulinkmanu79_7No ratings yet
- Sistemas Operativos Curso 2014/2015Document6 pagesSistemas Operativos Curso 2014/2015cibercafejavaNo ratings yet
- Cuadratura de GaussDocument12 pagesCuadratura de GaussJuan Pablo LópezNo ratings yet
- Metodos Niuméricos para EDO 2Document43 pagesMetodos Niuméricos para EDO 2Sugey VegaNo ratings yet
- Trabajo Final Del Bio Reactor UltimoDocument36 pagesTrabajo Final Del Bio Reactor UltimoViviana Gimena Cjuno LeandroNo ratings yet
- Matrices y DeterminantesDocument8 pagesMatrices y DeterminantesCarlos PérezNo ratings yet
- Edp - 2Document31 pagesEdp - 2brunoNo ratings yet
- Filtros de KalmanDocument9 pagesFiltros de KalmanFrancisco SerranoNo ratings yet
- Apuntes MA1006Document44 pagesApuntes MA1006Carlos Herrera BNo ratings yet
- Actividad 3 - Resolución de Un PCU Con El Método de Jacobi - After 10Document11 pagesActividad 3 - Resolución de Un PCU Con El Método de Jacobi - After 10Robert Salazar ValverdeNo ratings yet
- Sesión 14 Integración DefinidaDocument45 pagesSesión 14 Integración DefinidaChristopher MalcaNo ratings yet
- ElcaminoaleatorioDocument9 pagesElcaminoaleatorioJhonnySanchezNo ratings yet
- Tipos de Errores Numéricos y Software de Cómputo Numérico DVDocument7 pagesTipos de Errores Numéricos y Software de Cómputo Numérico DVDaniel ValleNo ratings yet
- Algoritmo TarjaneDocument9 pagesAlgoritmo Tarjanevictor orlando sierra foreroNo ratings yet
- Teoría de GrafosDocument8 pagesTeoría de GrafosBelcebuuNo ratings yet
- 1 Taller Algebra Lineal.Document2 pages1 Taller Algebra Lineal.Henry LazaroNo ratings yet
- Uso de Freefem++Document11 pagesUso de Freefem++Daniel MendozaNo ratings yet
- Copia de Matematicas Actividad #2Document6 pagesCopia de Matematicas Actividad #2Darwin Steward0% (1)
- Serie de TaylorDocument33 pagesSerie de TaylorLuisa Orozco LoteroNo ratings yet
- Inteligencia ArtificialDocument45 pagesInteligencia ArtificialrusilverNo ratings yet
- Apunte Espacios VectorialesDocument36 pagesApunte Espacios VectorialesBeltran DuhartNo ratings yet
- Ejemplos TikzDocument5 pagesEjemplos TikzLuis Antonio Parrado RiverosNo ratings yet
- Metodos NumericosDocument19 pagesMetodos NumericosNohemi ReyesNo ratings yet
- Integracion Numerica Con MatlabDocument20 pagesIntegracion Numerica Con MatlabadalaviNo ratings yet
- Estructura Programa FortranDocument26 pagesEstructura Programa FortranRodrigo CabreraNo ratings yet
- Presión y temperaturaDocument3 pagesPresión y temperaturaJohn Dawson100% (1)
- Plano AligeradoDocument1 pagePlano AligeradoJohn DawsonNo ratings yet
- Obtención de óxidos, hidróxidos, ácidos y salesDocument2 pagesObtención de óxidos, hidróxidos, ácidos y salesJohn DawsonNo ratings yet
- Tarea TablaPeriodicaDocument2 pagesTarea TablaPeriodicaJohn Dawson100% (1)
- 013 Planilla de Metrado Especialidad Estructuras - IiDocument205 pages013 Planilla de Metrado Especialidad Estructuras - IiLenin SmithNo ratings yet
- Ejercicios para Practicar Metodos NumericosDocument2 pagesEjercicios para Practicar Metodos NumericosJohn DawsonNo ratings yet
- Tarea TablaPeriodicaDocument2 pagesTarea TablaPeriodicaJohn Dawson100% (1)
- Tarea TablaPeriodicaDocument2 pagesTarea TablaPeriodicaJohn Dawson100% (1)
- Nik 124Document2 pagesNik 124John DawsonNo ratings yet
- EJERCICIOS 3 para Practicar en AutocadDocument1 pageEJERCICIOS 3 para Practicar en AutocadJohn DawsonNo ratings yet
- S2 TAREA SEMANA 02 Propagación ErroresDocument2 pagesS2 TAREA SEMANA 02 Propagación ErroresJohn DawsonNo ratings yet
- Análisis y diseño de columnas de concretoDocument90 pagesAnálisis y diseño de columnas de concretoJuan JimenezNo ratings yet
- EJERCICIOS para Practicar AutocadDocument1 pageEJERCICIOS para Practicar AutocadJohn DawsonNo ratings yet
- Eejercicios Resueltos (Método de Steffensen)Document46 pagesEejercicios Resueltos (Método de Steffensen)John DawsonNo ratings yet
- EJERCICIO 6 - MetodosDocument4 pagesEJERCICIO 6 - MetodosJohn DawsonNo ratings yet
- Vigas - Hiperestaticas Universidad de ChileDocument25 pagesVigas - Hiperestaticas Universidad de ChileLuis OmarNo ratings yet
- ¿Que Es El Acero?Document24 pages¿Que Es El Acero?John DawsonNo ratings yet
- INFORME Daniel 2Document4 pagesINFORME Daniel 2John DawsonNo ratings yet
- Diseño de zapatas aisladas cuadradasDocument8 pagesDiseño de zapatas aisladas cuadradasJose Luis Gonzales DiazNo ratings yet
- Modelo Matemático: Difusión y El Transporte de Contaminantes en La Capa Límite AtmosféricaDocument23 pagesModelo Matemático: Difusión y El Transporte de Contaminantes en La Capa Límite AtmosféricaDaniel Alcides Pauyac AsorzaNo ratings yet
- Anova Trabajo de Estadistica EjemploDocument10 pagesAnova Trabajo de Estadistica EjemploExneyder MontoyaNo ratings yet
- Constante Michaelis MentelDocument3 pagesConstante Michaelis MentelAnniee FelizNo ratings yet
- Laboratorio Informe #1Document24 pagesLaboratorio Informe #1aaronNo ratings yet
- El UltrasónidoDocument11 pagesEl UltrasónidoJuan Jose Paniagua Medina100% (1)
- Unidad de Aprendizaje #01Document3 pagesUnidad de Aprendizaje #01Pablo Santos MirandaNo ratings yet
- TEMA ConicasDocument17 pagesTEMA ConicasARROYO GONZÀLEZ TERESA ELIZABETHNo ratings yet
- Asignación Docente Unidad 1Document3 pagesAsignación Docente Unidad 1Alejandro PrzNo ratings yet
- Problemas PropuestosDocument19 pagesProblemas PropuestosEdwin Ernesto Mariano SalazarNo ratings yet
- Guía de aprendizaje sobre números decimalesDocument6 pagesGuía de aprendizaje sobre números decimalesOscar Javier Santos RodriguezNo ratings yet
- Principios TermodinamicaDocument13 pagesPrincipios TermodinamicaAlexx WolfmanNo ratings yet
- ELECTROMAGNETISMODocument23 pagesELECTROMAGNETISMOAntonio Benítez ArroyoNo ratings yet
- EJEMPLOSDocument16 pagesEJEMPLOSMax Edinson Mejia DextreNo ratings yet
- CE85 Calculo 2 PDFDocument5 pagesCE85 Calculo 2 PDFPierreCheroNo ratings yet
- Practica Física - IntermedioDocument4 pagesPractica Física - IntermedioSol TapullimaNo ratings yet
- Taller 2 Corte IngenieriasDocument5 pagesTaller 2 Corte IngenieriasAndres Camilo Ramirez JimenezNo ratings yet
- Tercero MatemáticaDocument15 pagesTercero MatemáticaRosa Cruz EleraNo ratings yet
- Actividades Fisica Unidad 5Document12 pagesActividades Fisica Unidad 5Irma Arroyo Juárez100% (1)
- L6-1 Empujes Terreno MurosDocument24 pagesL6-1 Empujes Terreno MurosJose Leonardo Perez PerezNo ratings yet
- Power Point de EstadisticaDocument16 pagesPower Point de EstadisticaBruno DiazNo ratings yet
- Esp U1 Ea AlpmDocument5 pagesEsp U1 Ea AlpmAleex Moriarty25% (4)
- Informe Tecnico TopografiaDocument45 pagesInforme Tecnico TopografiaMalu Castaño33% (3)
- Arit 01Document2 pagesArit 01Jesus Alvaro Vargas ConchaNo ratings yet
- Escuela de Cambridge o Escuela NeoclásicaDocument5 pagesEscuela de Cambridge o Escuela NeoclásicaLuis GarciaNo ratings yet
- Modelos probabilísticos teoría conjuntos espacios muestralesDocument7 pagesModelos probabilísticos teoría conjuntos espacios muestralesTibisay De Suárez SilvaNo ratings yet
- Curso Trafos T8 El Transformador Trifásico - Grupos de Conexion - 02 - 2013Document84 pagesCurso Trafos T8 El Transformador Trifásico - Grupos de Conexion - 02 - 2013NICOLÁS MARÍN SAAVEDRANo ratings yet
- Sesión 2 BASES DE LA PROBABILIDADDocument26 pagesSesión 2 BASES DE LA PROBABILIDADPao HyunNo ratings yet
- Diseño Camara de CombustiionDocument7 pagesDiseño Camara de CombustiionRoque Huaraya EdwinNo ratings yet
- Reporte de InvestigacionDocument11 pagesReporte de InvestigacionEngel Cituk CaamalNo ratings yet
- Informe Estudiante PA2Document22 pagesInforme Estudiante PA2Anonymous Pvtub8J2No ratings yet