You might also like
- Dynamical Systems Method for Solving Nonlinear Operator EquationsFrom EverandDynamical Systems Method for Solving Nonlinear Operator EquationsRating: 5 out of 5 stars5/5 (1)
- Analysis2011 PDFDocument235 pagesAnalysis2011 PDFMirica Mihai AntonioNo ratings yet
- Tables of Laguerre Polynomials and Functions: Mathematical Tables Series, Vol. 39From EverandTables of Laguerre Polynomials and Functions: Mathematical Tables Series, Vol. 39No ratings yet
- Probability and Statistics ConceptsDocument73 pagesProbability and Statistics ConceptsatifNo ratings yet
- ElectromagnetismDocument89 pagesElectromagnetismTeh Boon SiangNo ratings yet
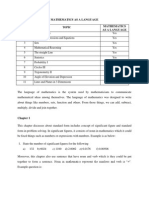
- Mathematics as a Language: Chapters on Standard Form, Quadratic Expressions, Sets, Reasoning and MoreDocument6 pagesMathematics as a Language: Chapters on Standard Form, Quadratic Expressions, Sets, Reasoning and MoreFarah LiyanaNo ratings yet
- Mathematica PDFDocument3 pagesMathematica PDFAsanka AmarasingheNo ratings yet
- Pde CaracteristicasDocument26 pagesPde CaracteristicasAnonymous Vd26Pzpx80No ratings yet
- D Alembert SolutionDocument22 pagesD Alembert SolutionDharmendra Kumar0% (1)
- Introduction To Calculus of Vector FieldsDocument46 pagesIntroduction To Calculus of Vector Fieldssalem aljohiNo ratings yet
- The Finite Element Method For 2D Problems: Theorem 9.1Document47 pagesThe Finite Element Method For 2D Problems: Theorem 9.1Anita RahmawatiNo ratings yet
- Homotopy Perturbation Method For Solving Partial DifferentialDocument14 pagesHomotopy Perturbation Method For Solving Partial Differentiallily suryaniNo ratings yet
- Marsh Mathematica - ElectromagnetismDocument70 pagesMarsh Mathematica - ElectromagnetismAlejandro GabrielNo ratings yet
- Chapter 17 PDFDocument10 pagesChapter 17 PDFChirilicoNo ratings yet
- Hardy Spaces Lecture Notes 1Document62 pagesHardy Spaces Lecture Notes 1Valdrick100% (1)
- The University of Edinburgh Dynamical Systems Problem SetDocument4 pagesThe University of Edinburgh Dynamical Systems Problem SetHaaziquah TahirNo ratings yet
- Finite Element Method Solver for Poisson's EquationDocument4 pagesFinite Element Method Solver for Poisson's EquationRizwan SamorNo ratings yet
- MIT Métodos MatemáticosDocument136 pagesMIT Métodos MatemáticosEsthefano Morales CampañaNo ratings yet
- Example of Hessenberg ReductionDocument21 pagesExample of Hessenberg ReductionMohammad Umar RehmanNo ratings yet
- Oscillation of Nonlinear Neutral Delay Differential Equations PDFDocument20 pagesOscillation of Nonlinear Neutral Delay Differential Equations PDFKulin DaveNo ratings yet
- Partial Differential Equations of Applied Mathematics Lecture Notes, Math 713 Fall, 2003Document128 pagesPartial Differential Equations of Applied Mathematics Lecture Notes, Math 713 Fall, 2003Franklin feelNo ratings yet
- ProjectDocument39 pagesProjectJeo C AuguinNo ratings yet
- Numerical Linear Algebra Methods and ApplicationsDocument2 pagesNumerical Linear Algebra Methods and ApplicationsSankalp ChauhanNo ratings yet
- Lecture09 AfterDocument31 pagesLecture09 AfterLemon SodaNo ratings yet
- Dynamical Systems: 5.1 Phase PortraitsDocument36 pagesDynamical Systems: 5.1 Phase PortraitsRyan TraversNo ratings yet
- Lagrangian Mechanics: 3.1 Action PrincipleDocument15 pagesLagrangian Mechanics: 3.1 Action PrincipleRyan TraversNo ratings yet
- Relativistic Electromagnetism: 6.1 Four-VectorsDocument15 pagesRelativistic Electromagnetism: 6.1 Four-VectorsRyan TraversNo ratings yet
- Differential Geometry 2009-2010Document45 pagesDifferential Geometry 2009-2010Eric ParkerNo ratings yet
- Rigid Bodies: 2.1 Many-Body SystemsDocument17 pagesRigid Bodies: 2.1 Many-Body SystemsRyan TraversNo ratings yet
- Generating FunctionsDocument8 pagesGenerating FunctionsRafael M. Rubio100% (1)
- MATH2045: Vector Calculus & Complex Variable TheoryDocument50 pagesMATH2045: Vector Calculus & Complex Variable TheoryAnonymous 8nJXGPKnuW100% (2)
- Functions of Bounded VariationDocument30 pagesFunctions of Bounded VariationSee Keong Lee100% (1)
- Metric Spaces PDFDocument33 pagesMetric Spaces PDFmatty20113No ratings yet
- Boris Khesin - Topological Fluid DynamicsDocument11 pagesBoris Khesin - Topological Fluid DynamicsPlamcfeNo ratings yet
- Lecture of Vector NormsDocument16 pagesLecture of Vector NormsEnes ŞavlıNo ratings yet
- PDF PPT Mathematical Physics Tensor Unit 7Document43 pagesPDF PPT Mathematical Physics Tensor Unit 7Pratip JanaNo ratings yet
- Choudhary) - Metric SpacesDocument28 pagesChoudhary) - Metric SpacesKhmer ChamNo ratings yet
- Sums of Two Squares: Pete L. ClarkDocument7 pagesSums of Two Squares: Pete L. Clarkماجد اسماعيل سميرNo ratings yet
- Sturm-Liouville TheoryDocument7 pagesSturm-Liouville TheoryRobertRoigNo ratings yet
- Hamiltonian Mechanics: 4.1 Hamilton's EquationsDocument9 pagesHamiltonian Mechanics: 4.1 Hamilton's EquationsRyan TraversNo ratings yet
- Numerical Solutions of Second Order Boundary Value Problems by Galerkin Residual Method On Using Legendre PolynomialsDocument11 pagesNumerical Solutions of Second Order Boundary Value Problems by Galerkin Residual Method On Using Legendre PolynomialsIOSRjournalNo ratings yet
- Finite Abelian GroupsDocument6 pagesFinite Abelian GroupsdancavallaroNo ratings yet
- Project MphilDocument64 pagesProject Mphilrameshmaths_aplNo ratings yet
- 3 7 6Document8 pages3 7 6Mary BassanNo ratings yet
- EE263 Autumn 2013-14 homework problemsDocument153 pagesEE263 Autumn 2013-14 homework problemsHimanshu Saikia JNo ratings yet
- MargulisDocument7 pagesMargulisqbeecNo ratings yet
- Real Analysis - Homework Solutions: Chris Monico, May 2, 2013Document37 pagesReal Analysis - Homework Solutions: Chris Monico, May 2, 2013gustavoNo ratings yet
- Metric Spaces ExplainedDocument42 pagesMetric Spaces ExplainedAmol MittalNo ratings yet
- (Lecture Notes) Andrei Jorza-Math 5c - Introduction To Abstract Algebra, Spring 2012-2013 - Solutions To Some Problems in Dummit & Foote (2013)Document30 pages(Lecture Notes) Andrei Jorza-Math 5c - Introduction To Abstract Algebra, Spring 2012-2013 - Solutions To Some Problems in Dummit & Foote (2013)momNo ratings yet
- Solutions To Assignment 4Document11 pagesSolutions To Assignment 4Sandeep SajuNo ratings yet
- Fermat 2Document24 pagesFermat 2acomillaNo ratings yet
- Dimensionless Analysis PDFDocument16 pagesDimensionless Analysis PDFVinod YbNo ratings yet
- Diffy Qs 1st Order Linear de Lec (2) (1) ApatDocument19 pagesDiffy Qs 1st Order Linear de Lec (2) (1) ApatClaire G. MagluyanNo ratings yet
- Solution Set 3Document11 pagesSolution Set 3HaseebAhmadNo ratings yet
- Selected Solutions To AxlerDocument5 pagesSelected Solutions To Axlerprabhamaths0% (1)
- Ex 3 SolutionsDocument3 pagesEx 3 SolutionsSanjeev ShuklaNo ratings yet
- The Role of LUB Axiom in Real Analysis: S. Kumaresan School of Math. and Stat. University of Hyderabad Hyderabad 500046Document10 pagesThe Role of LUB Axiom in Real Analysis: S. Kumaresan School of Math. and Stat. University of Hyderabad Hyderabad 500046Rakesh James100% (1)
- Accident Handling of Electrical Fire and China's Experience - 0602Document80 pagesAccident Handling of Electrical Fire and China's Experience - 0602Susi SusilowatiNo ratings yet
- Buku Saku Covid-19Document18 pagesBuku Saku Covid-19Susi SusilowatiNo ratings yet
- Synthesis Characterization and Applications of Microencapsulated Phase Change Materials in Thermal Energy Storage A Review 2017 Energy and BuildingsDocument19 pagesSynthesis Characterization and Applications of Microencapsulated Phase Change Materials in Thermal Energy Storage A Review 2017 Energy and BuildingsSusi SusilowatiNo ratings yet
- Designing Greener Self-Compacting ConcreteDocument6 pagesDesigning Greener Self-Compacting Concretejia weiNo ratings yet
- Energy Conversion and ManagementDocument11 pagesEnergy Conversion and ManagementSusi SusilowatiNo ratings yet
- Life Cycle Assessment and Environmental Efficiency of Concrete MaterialsDocument249 pagesLife Cycle Assessment and Environmental Efficiency of Concrete MaterialsSusi SusilowatiNo ratings yet
- Radiological and Material Characterization of High Volume Fly Ash ConcreteDocument8 pagesRadiological and Material Characterization of High Volume Fly Ash ConcreteKaraline MarcesNo ratings yet
- Quantitative Assessment of The Impact of Use of Portland Limestone Cements in North Carolina Concrete PavementsDocument205 pagesQuantitative Assessment of The Impact of Use of Portland Limestone Cements in North Carolina Concrete PavementsSusi SusilowatiNo ratings yet
- Hydraulic JumpDocument19 pagesHydraulic JumpSusi SusilowatiNo ratings yet
- Metode Penelitian Kualitatif Lexy J Moleong PDFDocument3 pagesMetode Penelitian Kualitatif Lexy J Moleong PDFNur Haliza50% (2)
- GRCDP00696190000029942Document2 pagesGRCDP00696190000029942Gokul KrishnanNo ratings yet
- World Wide WebDocument57 pagesWorld Wide WebmerinNo ratings yet
- Datapath OverviewDocument7 pagesDatapath OverviewJonathan TinnerNo ratings yet
- Programming Cable Users GuideDocument13 pagesProgramming Cable Users GuideSahal AhammedNo ratings yet
- Integrating Siebel Web Services Aug2006Document146 pagesIntegrating Siebel Web Services Aug2006api-3732129100% (1)
- Problems On Poisson DistributionDocument4 pagesProblems On Poisson DistributionMomanyi IvyNo ratings yet
- LED User's ManualDocument13 pagesLED User's ManualCristiNo ratings yet
- OPC UA Part 1 - Overview and Concepts 1.03 SpecificationDocument27 pagesOPC UA Part 1 - Overview and Concepts 1.03 SpecificationKanenas KanenasNo ratings yet
- Year 3 Hass Geography and Digital Tech Imovie Rubric RedactedDocument1 pageYear 3 Hass Geography and Digital Tech Imovie Rubric Redactedapi-327938582No ratings yet
- Lehmann - 1981 - Algebraic Specification of Data Types - A Synthetic Approach PDFDocument43 pagesLehmann - 1981 - Algebraic Specification of Data Types - A Synthetic Approach PDFLógica UsbNo ratings yet
- Add String ExtensionsDocument6 pagesAdd String Extensionsinfo.glcom5161No ratings yet
- Cse Viii Advanced Computer Architectures 06CS81 Notes PDFDocument156 pagesCse Viii Advanced Computer Architectures 06CS81 Notes PDFHarshith HarshiNo ratings yet
- An Approximate Analysis Procedure For Piled Raft FoundationsDocument21 pagesAn Approximate Analysis Procedure For Piled Raft FoundationsNicky198100% (1)
- Master theorem explainedDocument6 pagesMaster theorem explainedSuperFly SmithNo ratings yet
- DbmsDocument26 pagesDbmsSoumik DasNo ratings yet
- Grasshopper Open ClassesDocument2 pagesGrasshopper Open Classesming3433% (3)
- Como Fazer - Desbloquear Um Arquivo .PDF ProtegidoDocument6 pagesComo Fazer - Desbloquear Um Arquivo .PDF ProtegidomarcusforteNo ratings yet
- Referral and Record Keeping: Beringuel, Christian JosephDocument5 pagesReferral and Record Keeping: Beringuel, Christian JosephChristian Joseph Beringuel NietesNo ratings yet
- Automotive Fuel Tank Sloshing AnalysisDocument34 pagesAutomotive Fuel Tank Sloshing AnalysisEdwin SpencerNo ratings yet
- GuiXT InputScriptDocument8 pagesGuiXT InputScriptKumud RanjanNo ratings yet
- WorldSpan - 9I0B Advanced Worldspan SyllabusDocument10 pagesWorldSpan - 9I0B Advanced Worldspan SyllabusAlexandra NicNo ratings yet
- C++ Nested Loops LabDocument8 pagesC++ Nested Loops LabFikriZainNo ratings yet
- Time Series Using Stata (Oscar Torres-Reyna Version) : December 2007Document32 pagesTime Series Using Stata (Oscar Torres-Reyna Version) : December 2007Humayun KabirNo ratings yet
- L6 Systems of InequalitiesDocument25 pagesL6 Systems of InequalitiesFlorence FlorendoNo ratings yet
- Geometric SeriesDocument21 pagesGeometric SeriesRoszelan Majid50% (2)
- MES Evaluation and SelectionDocument16 pagesMES Evaluation and Selectionadarshdk1100% (1)
- ReadmeDocument18 pagesReadmeankit99ankitNo ratings yet
- Frequently Asked QuestionsDocument3 pagesFrequently Asked QuestionsGuru SwamyNo ratings yet
- Chap 1 Abhiram RanadeDocument40 pagesChap 1 Abhiram RanadeSagar Addepalli0% (1)