You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Electric Fan RepairDocument12 pagesElectric Fan RepairYsabelle Tagaruma33% (3)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Unbalance Power Flow Calculation For A Radial Distribution System Using Forward-Backward Propagation AlgorithmDocument6 pagesUnbalance Power Flow Calculation For A Radial Distribution System Using Forward-Backward Propagation Algorithmhassan100% (1)
- Esna CatalogDocument12 pagesEsna Catalogbalaji_jayadeva9546No ratings yet
- Fault Current Contribution From VSC-based WindTurbines To The GridDocument8 pagesFault Current Contribution From VSC-based WindTurbines To The GridhassanNo ratings yet
- Inverter Based DG Fault CalculationDocument13 pagesInverter Based DG Fault CalculationhassanNo ratings yet
- Links Deep WebDocument2 pagesLinks Deep WebArnoldTorresNo ratings yet
- Koel Engine, Ha Operation and Maintenance Manual (Ha - SR)Document89 pagesKoel Engine, Ha Operation and Maintenance Manual (Ha - SR)Karthik K Raja75% (12)
- A Three-Phase Power Flow Solution Method For Unbalanced Distribution NetworksDocument8 pagesA Three-Phase Power Flow Solution Method For Unbalanced Distribution NetworkshassanNo ratings yet
- SIWES Report by Bonjoru FelixDocument48 pagesSIWES Report by Bonjoru FelixPheelix Bonjoru100% (2)
- Building A Gate Way Service Using A SEGW TransactionDocument10 pagesBuilding A Gate Way Service Using A SEGW Transactionswamy_yalamanchiliNo ratings yet
- Fault Level Analysis of Power Distribution SystemDocument5 pagesFault Level Analysis of Power Distribution SystemhassanNo ratings yet
- Barrett Light 50Document23 pagesBarrett Light 50Zayd Iskandar Dzolkarnain Al-HadramiNo ratings yet
- P287 SCIL Programming BasicsDocument78 pagesP287 SCIL Programming BasicsOscar GarciaNo ratings yet
- Contribution of Photovoltaic Power Generation Systems To AC Short Circuits - A Survey of Current Modeling Practices and ChallengesDocument6 pagesContribution of Photovoltaic Power Generation Systems To AC Short Circuits - A Survey of Current Modeling Practices and ChallengeshassanNo ratings yet
- A Common Modeling Platform For The Multiphase Analysis and Simulation of Modern Distribution Systems in Offline and Distribution Management System ApplicationsDocument6 pagesA Common Modeling Platform For The Multiphase Analysis and Simulation of Modern Distribution Systems in Offline and Distribution Management System ApplicationshassanNo ratings yet
- General and Simplified Computation of Fault Flow and Contribution of Distributed Sources in Unbalanced Distribution NetworksDocument8 pagesGeneral and Simplified Computation of Fault Flow and Contribution of Distributed Sources in Unbalanced Distribution NetworkshassanNo ratings yet
- Low Voltage Ride-Through of Single-Phase Transformerless Photovoltaic InvertersDocument10 pagesLow Voltage Ride-Through of Single-Phase Transformerless Photovoltaic InvertershassanNo ratings yet
- 04039460Document8 pages04039460Panu Mark IINo ratings yet
- Load Flow Studies of A Grid Interfaced WDocument90 pagesLoad Flow Studies of A Grid Interfaced WhassanNo ratings yet
- Inverter Based DGDocument6 pagesInverter Based DGhassanNo ratings yet
- Hot Products 2014Document8 pagesHot Products 2014inclumarhNo ratings yet
- Swiss FCM Ordinance - EuPIA QDocument6 pagesSwiss FCM Ordinance - EuPIA Qiz_nazNo ratings yet
- Lecture No-03 Course PCB Manufacturing IE-236 & Electronic Simulation and PCB Manufacturing (Repeaters Only)Document22 pagesLecture No-03 Course PCB Manufacturing IE-236 & Electronic Simulation and PCB Manufacturing (Repeaters Only)Ravi Shankar 31No ratings yet
- Calculating The Pathlength of Liquid Cells by FTIR PIKEDocument1 pageCalculating The Pathlength of Liquid Cells by FTIR PIKEMoises RomeroNo ratings yet
- Truck Parking Areas 2009Document147 pagesTruck Parking Areas 2009IRUNo ratings yet
- Factors Affecting Beam StrengthDocument2 pagesFactors Affecting Beam StrengthkalpanaadhiNo ratings yet
- Etic HackDocument31 pagesEtic HackJOrdi CrespoNo ratings yet
- Fenelon - Dialogues With The DeadDocument279 pagesFenelon - Dialogues With The DeadjuanojedamenaNo ratings yet
- Ultrasafe AESDocument7 pagesUltrasafe AEShuyNo ratings yet
- NTS - Math Notes & Mcqs Solved Grade 8thDocument10 pagesNTS - Math Notes & Mcqs Solved Grade 8thZahid KumailNo ratings yet
- ETG3000 BrochureDocument9 pagesETG3000 BrochureMayolo MartinezNo ratings yet
- Completion CertificateDocument9 pagesCompletion CertificateakinladekingsleyNo ratings yet
- Plasma TV SMPS TroubleshoutingDocument5 pagesPlasma TV SMPS TroubleshoutingmindjokerNo ratings yet
- AS9104 2A Form-CDocument3 pagesAS9104 2A Form-C44abcNo ratings yet
- Opamp 5Document42 pagesOpamp 5Ann RazonNo ratings yet
- About Indian Institute of Technology KanpurDocument54 pagesAbout Indian Institute of Technology KanpurPooja PundeerNo ratings yet
- Leading Architect and Enabler in Digital SocietyDocument31 pagesLeading Architect and Enabler in Digital SocietyRifki NugrahaNo ratings yet
- Epicor ERP Embedded Courses A4 FS ENSDocument2 pagesEpicor ERP Embedded Courses A4 FS ENSHuong NguyenNo ratings yet
- Lowry Hill East Residential Historic DistrictDocument14 pagesLowry Hill East Residential Historic DistrictWedgeLIVENo ratings yet
- Hydraulic Vehicle Lift ST List of Parts and Appendices Stertil B.V BDocument24 pagesHydraulic Vehicle Lift ST List of Parts and Appendices Stertil B.V BOvidiu PopaNo ratings yet
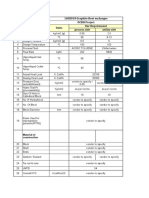
- 16HE018 Graphite Heat Exchanger DCBH Project Sr. No. Particulars Units Our Requirement Process Side Utility SideDocument2 pages16HE018 Graphite Heat Exchanger DCBH Project Sr. No. Particulars Units Our Requirement Process Side Utility SideBhaumik BhuvaNo ratings yet
- Assessing The Impact of Premier Information Systems Research OverDocument20 pagesAssessing The Impact of Premier Information Systems Research OvergasibuteaNo ratings yet