You might also like
- Irjet-V8i12267 2Document7 pagesIrjet-V8i12267 2Om SinghNo ratings yet
- Determination of Heat Transfer Coefficient of Brake Rotor Disc Using CFD SimulationDocument9 pagesDetermination of Heat Transfer Coefficient of Brake Rotor Disc Using CFD SimulationIAEME PublicationNo ratings yet
- About The Preliminary Design of The Suspension SPRDocument7 pagesAbout The Preliminary Design of The Suspension SPRalinNo ratings yet
- Rolling Ressistance of Truck TireDocument8 pagesRolling Ressistance of Truck TiregdanonNo ratings yet
- Mathematical Model For Torsional Vibration Analysis in Internal Combustion EnginesDocument6 pagesMathematical Model For Torsional Vibration Analysis in Internal Combustion Enginesstefanovicana1No ratings yet
- Stress Behaviour Improvement of Automobile Flywheel Under High Centrifugal ForcesDocument6 pagesStress Behaviour Improvement of Automobile Flywheel Under High Centrifugal ForcesParag NaikNo ratings yet
- Effects of Disk Geometry On Strength of A Centrifugal Compressor Impeller For A High Pressure Ratio TurbochargerDocument8 pagesEffects of Disk Geometry On Strength of A Centrifugal Compressor Impeller For A High Pressure Ratio TurbochargerjswxieNo ratings yet
- A Thermomechanical Model For The Analysis of Disc Brake Using The Finite Element Method in Frictional ContactDocument17 pagesA Thermomechanical Model For The Analysis of Disc Brake Using The Finite Element Method in Frictional ContactRe-Invent ElucidationNo ratings yet
- Design of Journal Bearings in Reciprocating Compressors: Purdue E-PubsDocument6 pagesDesign of Journal Bearings in Reciprocating Compressors: Purdue E-PubsRahman SiPujangga MistiztNo ratings yet
- Principles Tire DesignDocument22 pagesPrinciples Tire DesignsiritapeNo ratings yet
- Paper Gearbox enDocument12 pagesPaper Gearbox enVikas TyagiNo ratings yet
- 1.steam Turbine Rotor GroovesDocument7 pages1.steam Turbine Rotor GroovesRaheem JunaidiNo ratings yet
- Engine Mount and Structural Design PDFDocument12 pagesEngine Mount and Structural Design PDFTanishaSharmaNo ratings yet
- Paper CT4 Load Assumptions For Pitch System Manj 041Document5 pagesPaper CT4 Load Assumptions For Pitch System Manj 041mbreuking6943No ratings yet
- Design and Optimization of Planetary Gears - DriveConcepts GMBHDocument12 pagesDesign and Optimization of Planetary Gears - DriveConcepts GMBHmayar mimiNo ratings yet
- Crankshaft Failure in CompressorDocument12 pagesCrankshaft Failure in CompressorKristomiDerMarine-IngenieurNo ratings yet
- E-50 - Aeroengine Gearbox Design - BAPT 09 - P 595Document6 pagesE-50 - Aeroengine Gearbox Design - BAPT 09 - P 595Nikos VaxevanidisNo ratings yet
- Air Brake Design & Safety: Part OneDocument42 pagesAir Brake Design & Safety: Part OnedeepakNo ratings yet
- Brake Squeal PaperDocument7 pagesBrake Squeal PaperjoshibecNo ratings yet
- Optimizing Planetary Gears PDFDocument7 pagesOptimizing Planetary Gears PDFyildyusuf100% (1)
- Rotor Dynamics of Aircraft Gas Turbine EnginesDocument5 pagesRotor Dynamics of Aircraft Gas Turbine EnginesfengrotorNo ratings yet
- Gear Design ProcedureDocument9 pagesGear Design Procedurenithree100% (1)
- Thermal Analysis of Disc Brakes Using Finite Element Method: Articles You May Be Interested inDocument6 pagesThermal Analysis of Disc Brakes Using Finite Element Method: Articles You May Be Interested inChristina Christina ChristinaNo ratings yet
- Dynamic Load Analysis and Optimization of Connecting Rod of Samand EngineDocument9 pagesDynamic Load Analysis and Optimization of Connecting Rod of Samand EnginecamiloromezNo ratings yet
- A Reduced-Scale Brake Dynamometer For Friction Characterization PDFDocument7 pagesA Reduced-Scale Brake Dynamometer For Friction Characterization PDFashwaniNo ratings yet
- Design Analysis of Spur Gear With The Usage of The Advanced ComputerDocument6 pagesDesign Analysis of Spur Gear With The Usage of The Advanced ComputerMohammed JimmyNo ratings yet
- FE-Based Wheel Fatigue Analysis Using MSC - FATIGUE: X y XyDocument5 pagesFE-Based Wheel Fatigue Analysis Using MSC - FATIGUE: X y Xypkpnitian_152297088No ratings yet
- Belt Conveyor Pulley DesignDocument11 pagesBelt Conveyor Pulley Designthakur_raghab100% (1)
- Case Study and Stress Analysis of A 3Document12 pagesCase Study and Stress Analysis of A 3Talha MemonNo ratings yet
- Thesis On Fretting Fatigue in Railway AxlesDocument6 pagesThesis On Fretting Fatigue in Railway Axlespamelasmithlittlerock100% (2)
- Plagiarism Checker X Originality Report: Similarity Found: 30%Document7 pagesPlagiarism Checker X Originality Report: Similarity Found: 30%pramo_dassNo ratings yet
- Structure Analysis of Cast Iron For Dry Clutch of Amphibious VehicleDocument4 pagesStructure Analysis of Cast Iron For Dry Clutch of Amphibious VehicleseventhsensegroupNo ratings yet
- ISCA RJEngS 2012 090Document6 pagesISCA RJEngS 2012 090Ganesh Anand GoparajuNo ratings yet
- Numerical Investigation of CSP Air Cooled CondenseDocument9 pagesNumerical Investigation of CSP Air Cooled CondenseAnimesh GhoshNo ratings yet
- Thermohydrodynamic Analysis of A Journal BearingDocument33 pagesThermohydrodynamic Analysis of A Journal BearingAmalendu BiswasNo ratings yet
- Analysis and Synthesis Procedures For Geneva Mechanism DesignDocument12 pagesAnalysis and Synthesis Procedures For Geneva Mechanism DesignAmthe ManNo ratings yet
- An Investigation of Control Strategies On Gearbox Damage: Abstract: 2. Experiment SetupDocument5 pagesAn Investigation of Control Strategies On Gearbox Damage: Abstract: 2. Experiment Setupash1968No ratings yet
- Multi-Objective Optimization of An Axial Compressor Blade: Abdus Samad and Kwang-Yong KimDocument9 pagesMulti-Objective Optimization of An Axial Compressor Blade: Abdus Samad and Kwang-Yong KimEslam NagyNo ratings yet
- Disc Brake ProjectDocument3 pagesDisc Brake ProjectPathan ShamsheerkhanNo ratings yet
- Optimization of Design of Brake Drum of Two Wheeler Through Approach of Reverse Engineering by Using Ansys SoftwareDocument6 pagesOptimization of Design of Brake Drum of Two Wheeler Through Approach of Reverse Engineering by Using Ansys SoftwareIOSRjournalNo ratings yet
- 10 Development of A High Performance Centrifugal Compressor Using A 3D Inverse Design TechniqueDocument11 pages10 Development of A High Performance Centrifugal Compressor Using A 3D Inverse Design TechniqueSubhash PadmanabhanNo ratings yet
- Analysis of The Contact Pressure Between Cams and RollerDocument9 pagesAnalysis of The Contact Pressure Between Cams and Rolleranmol6237No ratings yet
- Suspension Paper 5Document6 pagesSuspension Paper 5Rainier EstradaNo ratings yet
- Compression Load Transmission in Screw Compressors: Journal of Sound and Vibration (1997) 207 (5), 671-691Document21 pagesCompression Load Transmission in Screw Compressors: Journal of Sound and Vibration (1997) 207 (5), 671-691saekNo ratings yet
- Modeling of The Suspension of A Passenger Bus by Finite Element SoftwareDocument3 pagesModeling of The Suspension of A Passenger Bus by Finite Element SoftwarePrasad KhatiNo ratings yet
- Design and Optimization of The Impeller On Centrifugal Compressor in Fuel Cell VehicleDocument8 pagesDesign and Optimization of The Impeller On Centrifugal Compressor in Fuel Cell VehicleSuherman MuktiNo ratings yet
- Paper Rotor DynamicsDocument12 pagesPaper Rotor DynamicsTony HeNo ratings yet
- OptDesignHelicalCompressSpringTampingRammDocument6 pagesOptDesignHelicalCompressSpringTampingRammKhalid AkbaryNo ratings yet
- A Study of Mesh Sensitivity For Crash Simulations - Comparison of Manually and Batch Meshed ModelsDocument8 pagesA Study of Mesh Sensitivity For Crash Simulations - Comparison of Manually and Batch Meshed Modelscharan2kNo ratings yet
- Modeling and Structural Analysis of Alloy Wheel Using COSMOSDocument6 pagesModeling and Structural Analysis of Alloy Wheel Using COSMOSRanjit RNo ratings yet
- Using Rotordynamics To Solve Serious Machinery Vibration ProblemsDocument26 pagesUsing Rotordynamics To Solve Serious Machinery Vibration ProblemsTheerayoot PoomchaiNo ratings yet
- A07 PPTDocument55 pagesA07 PPTashutosh JhaNo ratings yet
- Disc Brake Analysis ProjectDocument7 pagesDisc Brake Analysis ProjectPathan ShamsheerkhanNo ratings yet
- Analiza Termica Disc FranaDocument8 pagesAnaliza Termica Disc FranaLuca VictorNo ratings yet
- Belt Conveyor Pulley Design - Why The FailuresDocument9 pagesBelt Conveyor Pulley Design - Why The FailuresWaris La Joi WakatobiNo ratings yet
- The Application of Vibration Accelerations in The Assessment of Average Friction Coefficient of A Railway Brake DiscDocument10 pagesThe Application of Vibration Accelerations in The Assessment of Average Friction Coefficient of A Railway Brake DiscMuhammad NuzanNo ratings yet
- Internal Combustion Engine Bearings Lubrication in Hydrodynamic BearingsFrom EverandInternal Combustion Engine Bearings Lubrication in Hydrodynamic BearingsNo ratings yet
- Nitish ResumeDocument1 pageNitish ResumeashwaniNo ratings yet
- Failure Analysis of A Motorcycle Brake DiscDocument13 pagesFailure Analysis of A Motorcycle Brake DiscashwaniNo ratings yet
- Brake Disk AnalysisDocument20 pagesBrake Disk AnalysisashwaniNo ratings yet
- Disc Brake Design and AnalysisDocument20 pagesDisc Brake Design and AnalysisashwaniNo ratings yet
- A Reduced-Scale Brake Dynamometer For Friction Characterization PDFDocument7 pagesA Reduced-Scale Brake Dynamometer For Friction Characterization PDFashwaniNo ratings yet
- M1 Ques Slide 1 - 1Document4 pagesM1 Ques Slide 1 - 1knizam1971No ratings yet
- Astm A159-83-2001Document5 pagesAstm A159-83-2001NadhiraNo ratings yet
- Gen 00 104265 Qa 6050 00514 0000 03 PDFDocument11 pagesGen 00 104265 Qa 6050 00514 0000 03 PDFchandana kumarNo ratings yet
- The Pure Substance:: A Pure Substance Is One That Has A Homogeneous and Invariable Chemical CompositionDocument113 pagesThe Pure Substance:: A Pure Substance Is One That Has A Homogeneous and Invariable Chemical CompositionHrishikesh ReddyNo ratings yet
- Primena Application: Belarus DeutzDocument6 pagesPrimena Application: Belarus DeutzDragan LazicNo ratings yet
- Ds421 Specification Sheet EnglishDocument4 pagesDs421 Specification Sheet EnglishmegamNo ratings yet
- Estimation of Flow Patterns: NPTEL, IIT Kharagpur, Prof. Gargi Das, Department of Chemical EngineeringDocument4 pagesEstimation of Flow Patterns: NPTEL, IIT Kharagpur, Prof. Gargi Das, Department of Chemical EngineeringahmedNo ratings yet
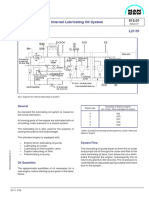
- Internal Lubricating Oil System: GeneralDocument3 pagesInternal Lubricating Oil System: GeneralAtanasio PerezNo ratings yet
- SanipackDocument2 pagesSanipackJose C. Pachas100% (1)
- Viva Questions Tom IIDocument1 pageViva Questions Tom IIDenise NelsonNo ratings yet
- Plano Explosivo & Partes y Piezas Wmf-m160gbDocument18 pagesPlano Explosivo & Partes y Piezas Wmf-m160gbCatalina GonzalezNo ratings yet
- VentilationDocument14 pagesVentilationevansparrowNo ratings yet
- Welding Machine - Project ReportDocument71 pagesWelding Machine - Project ReportTanvi Khurana65% (20)
- Hydroflo SelectionDocument1 pageHydroflo SelectionJosh SorensenNo ratings yet
- R Series: Operation and Maintenance Manual Positive Displacement PumpDocument132 pagesR Series: Operation and Maintenance Manual Positive Displacement PumpNathawatNo ratings yet
- Dr.M.uthayakumar - Google Scholar CitationsDocument13 pagesDr.M.uthayakumar - Google Scholar CitationsrkNo ratings yet
- Vibration of The Millenium Bridge LondonDocument16 pagesVibration of The Millenium Bridge LondonSilver Olguín CamachoNo ratings yet
- Gasketing Design Guide-Final2-1Document23 pagesGasketing Design Guide-Final2-1Joy BhattacharyaNo ratings yet
- HVAC Engineer Project Manager in Boston MA Resume Clifford BaumDocument3 pagesHVAC Engineer Project Manager in Boston MA Resume Clifford BaumClifford BaumNo ratings yet
- Plastic Analysis of Unbraced Portal Frames of Steel Structures in PDFDocument99 pagesPlastic Analysis of Unbraced Portal Frames of Steel Structures in PDFbiniamNo ratings yet
- Manual For S PumpsDocument4 pagesManual For S PumpsPinguim FariaNo ratings yet
- Capex VS Opex CHiller - Carrier - 27-05-2020Document4 pagesCapex VS Opex CHiller - Carrier - 27-05-2020er_bhavinNo ratings yet
- Generator Manual: Installation - Operation - MaintenanceDocument66 pagesGenerator Manual: Installation - Operation - MaintenanceDaniel ArdilaNo ratings yet
- Diesel Engines (Kirloskar Type)Document3 pagesDiesel Engines (Kirloskar Type)Bimal ShahNo ratings yet
- Caterpillar 3208 Diesel Engine Service Manual Copy One (PDF, ENG, 154 MB) PDFDocument350 pagesCaterpillar 3208 Diesel Engine Service Manual Copy One (PDF, ENG, 154 MB) PDFАлександр80% (5)
- 1yn0 RM B5 PP-PVDFDocument1 page1yn0 RM B5 PP-PVDFjob allisonNo ratings yet
- Rai Rac-18cDocument24 pagesRai Rac-18cKyaw San OoNo ratings yet
- EC - Engine Control SystemDocument634 pagesEC - Engine Control SystemIlarion Ciobanu100% (2)
- Vapro Pressure and Heat Heat of VaporazationDocument5 pagesVapro Pressure and Heat Heat of VaporazationStephen Rey CaldeaNo ratings yet
- Cilindro Roemheld 1474Document2 pagesCilindro Roemheld 1474AdrianaNo ratings yet