You might also like
- Informacion LOGICA CABLEADA PDFDocument62 pagesInformacion LOGICA CABLEADA PDFJean Paul Soto VeraNo ratings yet
- Nom-001-Sede-2012 Instalaciones EléctricasDocument16 pagesNom-001-Sede-2012 Instalaciones EléctricaskillerdecorazonNo ratings yet
- Diagnostico de Automatismos ElectricosDocument22 pagesDiagnostico de Automatismos ElectricosLUIS ICHAICOTO BONCANCANo ratings yet
- Practica 3 Mando 2motores Restriccion de Arranque y ParadaDocument3 pagesPractica 3 Mando 2motores Restriccion de Arranque y ParadaJonnathan Tobayz100% (1)
- Barriga Rolando Protección de Motores EléctricosDocument6 pagesBarriga Rolando Protección de Motores EléctricosmorihnoNo ratings yet
- Práctica 1. ARRANQUE Y PARO DE MOTOR TRIFÁSICO.Document11 pagesPráctica 1. ARRANQUE Y PARO DE MOTOR TRIFÁSICO.Carlos Armando escobedo VázquezNo ratings yet
- 5.manual de Control Electromecanico 2014Document160 pages5.manual de Control Electromecanico 2014Chester Noel Brenes Aguirre100% (1)
- Protocolos de Pruebas de Tableros EléctricosDocument236 pagesProtocolos de Pruebas de Tableros EléctricosRamiro Escobar IporreNo ratings yet
- Seguridad maniobras MTDocument26 pagesSeguridad maniobras MTTeobaldo PintoNo ratings yet
- Guia Basica de Puesta en Marcha 3G3MX2 PDFDocument2 pagesGuia Basica de Puesta en Marcha 3G3MX2 PDFAguirre Castillo Jose de JesusNo ratings yet
- Practica 1 AutomatizacionDocument12 pagesPractica 1 Automatizacionpondr100% (1)
- El contactor tipo solenoideDocument268 pagesEl contactor tipo solenoideguillermo100% (1)
- MapaGeoquímicoRevelaZonasConOroyMetalesEnChileDocument1 pageMapaGeoquímicoRevelaZonasConOroyMetalesEnChilefelipereinoso100% (2)
- Manual de Operación Dosificadora Creme 600Document7 pagesManual de Operación Dosificadora Creme 600Alejandro HernandezNo ratings yet
- ElectroneumaticaDocument5 pagesElectroneumaticaLuis Miguel BarrenoNo ratings yet
- Teoría de Los Variadores de VelocidadDocument64 pagesTeoría de Los Variadores de VelocidadEmilio Bonnet100% (2)
- Electricidad (II) .Elementos de Control y Maniobra.Document15 pagesElectricidad (II) .Elementos de Control y Maniobra.CARIBBEAN TANKERS100% (1)
- Instalación eléctrica domiciliariaDocument26 pagesInstalación eléctrica domiciliariaSergio AndradeNo ratings yet
- Instalación iluminación ambientes peligrososDocument4 pagesInstalación iluminación ambientes peligrososAnonymous DefbSuwiNo ratings yet
- DS 9247 CTM 530 Interface Module SpanishDocument2 pagesDS 9247 CTM 530 Interface Module Spanishclaudia nilNo ratings yet
- RelevadoresProteccionDocument5 pagesRelevadoresProteccionJaimitoGongora100% (1)
- Configuración de un variador Yaskawa-V1000 para controlar la velocidad e invertir el giro de un motor asíncronoDocument5 pagesConfiguración de un variador Yaskawa-V1000 para controlar la velocidad e invertir el giro de un motor asíncronocristianNo ratings yet
- Logica de Control de BombasDocument2 pagesLogica de Control de BombasCarlos Enrique Antaurco AtaucuriNo ratings yet
- Practicas Con LogoDocument5 pagesPracticas Con LogocalimovNo ratings yet
- Tarifa Aparamenta Carril Din y Cofrets ModularesDocument159 pagesTarifa Aparamenta Carril Din y Cofrets Modularesspereiro2012No ratings yet
- Simulacion de Enclavamientos en SubestacionesDocument3 pagesSimulacion de Enclavamientos en SubestacionesMario GonzálezNo ratings yet
- Automatismos Eléctricos Industriales. Elementos y Simulación Práctica - CompletaDocument5 pagesAutomatismos Eléctricos Industriales. Elementos y Simulación Práctica - CompletajosecoronadoNo ratings yet
- Manual Variadores de VelocidadDocument54 pagesManual Variadores de VelocidadGeorge Lucas Colan Alvarez100% (1)
- Actividad Interactiva AA2Document6 pagesActividad Interactiva AA2manuel vitonasNo ratings yet
- Practicas de ElectrotecniaDocument77 pagesPracticas de ElectrotecniaLambertoNo ratings yet
- Curso - Introduccion Al PLC Micro 1Document6 pagesCurso - Introduccion Al PLC Micro 1Manigoldo De la Cruz100% (2)
- Automatización por contactoresDocument64 pagesAutomatización por contactoresAndresLozadaNo ratings yet
- Funcionamiento Motor Inversión de GiroDocument2 pagesFuncionamiento Motor Inversión de GiroAlex DrakuNo ratings yet
- Control PID: Introducción a las acciones de control proporcional, integral y derivativaDocument65 pagesControl PID: Introducción a las acciones de control proporcional, integral y derivativaChristian OqNo ratings yet
- Guía de manejo del tablero de control de planta de instrumentaciónDocument10 pagesGuía de manejo del tablero de control de planta de instrumentaciónLUIS GABRIEL NORENA TRIGOSNo ratings yet
- Instalación y configuración de VFD mediante control remoto para bombeo de aguaDocument6 pagesInstalación y configuración de VFD mediante control remoto para bombeo de aguaBruno VeraNo ratings yet
- Diseño e implementación máquina bobinadora cableDocument165 pagesDiseño e implementación máquina bobinadora cablegabriel perezNo ratings yet
- Protecciones 04Document42 pagesProtecciones 04Pilar CasasNo ratings yet
- Manual BR6000-V3.0Document24 pagesManual BR6000-V3.0electro22No ratings yet
- Guardamotor, Contactor y Rele TermicosDocument1 pageGuardamotor, Contactor y Rele TermicosJaime AriasNo ratings yet
- Motor SaverDocument0 pagesMotor SaverFredy Martínez GonzaloNo ratings yet
- Automatizmos CableadosDocument25 pagesAutomatizmos CableadosjuanaNo ratings yet
- Curso de Sistemas de Protección y Relevación Industrial IIDocument19 pagesCurso de Sistemas de Protección y Relevación Industrial IIAldo Ulises VanegasNo ratings yet
- Resumen CADE SIMU 3Document7 pagesResumen CADE SIMU 3Abel Jiménez RodríguezNo ratings yet
- Practica Estrella TrianguloDocument7 pagesPractica Estrella TrianguloalandeakerNo ratings yet
- Automatismos industriales SENADocument2 pagesAutomatismos industriales SENABrandol Andrey SarayNo ratings yet
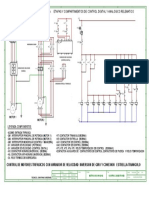
- Control de Dos Motores Trifasicos Con Variador de Velocidad, Inversion de Giro y Conexion Estrella-TrianguloDocument1 pageControl de Dos Motores Trifasicos Con Variador de Velocidad, Inversion de Giro y Conexion Estrella-TrianguloJonathan Cardenas0% (1)
- Manual AutopropulsadaDocument3 pagesManual Autopropulsadaamgelec123No ratings yet
- Simbologia Electrica NormalizadaDocument7 pagesSimbologia Electrica NormalizadaOscar Pardo PardoNo ratings yet
- 05 - Electricidad IndustrialDocument82 pages05 - Electricidad IndustrialMASSIELL DALISSANo ratings yet
- Funcionamiento y ventajas de los variadores de frecuenciaDocument28 pagesFuncionamiento y ventajas de los variadores de frecuenciaOrlando Pinto GonzalezNo ratings yet
- Montaje y puesta en marcha de sistemas robóticos y sistemas de visión, en bienes de equipo y maquinaria industrial. FMEE0208From EverandMontaje y puesta en marcha de sistemas robóticos y sistemas de visión, en bienes de equipo y maquinaria industrial. FMEE0208Rating: 3 out of 5 stars3/5 (1)
- Transformador De Estado Sólido: Revolucionando la red eléctrica para la calidad de la energía y la eficiencia energéticaFrom EverandTransformador De Estado Sólido: Revolucionando la red eléctrica para la calidad de la energía y la eficiencia energéticaNo ratings yet
- Sistemas Cableados Vs ProgramadosDocument6 pagesSistemas Cableados Vs ProgramadosALBERTO DAVID CARMONA MARTÍNEZNo ratings yet
- Control electromagnético: cuestionario sobre automatización industrialDocument14 pagesControl electromagnético: cuestionario sobre automatización industrialElhNo ratings yet
- Actividades Automatizacion Electroneumatica Juan Camilo Vasquez CortesDocument31 pagesActividades Automatizacion Electroneumatica Juan Camilo Vasquez CortesTheo Granda0% (2)
- Qué Es Un Autómata ProgramableDocument6 pagesQué Es Un Autómata ProgramableEfrain Lujan PazoNo ratings yet
- Qué es un autómata programableDocument13 pagesQué es un autómata programablejalvarNo ratings yet
- Componentes del sistema eléctrico 24VDocument16 pagesComponentes del sistema eléctrico 24VAnonymous m3tTeasYKNo ratings yet
- SistemaSuministroElectrico24VDCDocument6 pagesSistemaSuministroElectrico24VDCAnonymous m3tTeasYKNo ratings yet
- KOmatsu 930e-4 Indice SDocument2 pagesKOmatsu 930e-4 Indice SAnonymous m3tTeasYKNo ratings yet
- Komatsu 930E-4 Structural ComponentsDocument4 pagesKomatsu 930E-4 Structural ComponentsAnonymous m3tTeasYKNo ratings yet
- Komatsu 930E-4 Procedimiento AlmacenajeDocument16 pagesKomatsu 930E-4 Procedimiento AlmacenajeAnonymous m3tTeasYKNo ratings yet
- Komatsu 930E-4 Sistema de Filtracion de AireDocument6 pagesKomatsu 930E-4 Sistema de Filtracion de AireAnonymous m3tTeasYKNo ratings yet
- Procedimiento de desmontaje del alternadorDocument6 pagesProcedimiento de desmontaje del alternadorAnonymous m3tTeasYK100% (1)
- Komatsu 930E-4 TolvaDocument5 pagesKomatsu 930E-4 TolvaAnonymous m3tTeasYKNo ratings yet
- C03023 03-01 Sistema de EnfriadoDocument4 pagesC03023 03-01 Sistema de EnfriadoFabrizio JesúsNo ratings yet
- Desmontaje del módulo de potencia del camiónDocument8 pagesDesmontaje del módulo de potencia del camiónAnonymous m3tTeasYK100% (1)
- Komatsu 930E-4 Estanque CombustibleDocument4 pagesKomatsu 930E-4 Estanque CombustibleAnonymous m3tTeasYKNo ratings yet
- Komatsu 930E-4 StructuresDocument2 pagesKomatsu 930E-4 StructuresAnonymous m3tTeasYKNo ratings yet
- Komatsu 930E-4 Descripcion de Componentes PrincipalesDocument4 pagesKomatsu 930E-4 Descripcion de Componentes PrincipalesAnonymous m3tTeasYK100% (1)
- Komatsu 930E-4 Procedimiento AlmacenajeDocument16 pagesKomatsu 930E-4 Procedimiento AlmacenajeAnonymous m3tTeasYKNo ratings yet
- Komatsu 930E-4 Procedimiento de Revisión HidráulicaDocument4 pagesKomatsu 930E-4 Procedimiento de Revisión HidráulicaAnonymous m3tTeasYKNo ratings yet
- Maquinas Térmicas 99-IIDocument1 pageMaquinas Térmicas 99-IIAnonymous m3tTeasYKNo ratings yet
- Komatsu 930E-4 Cuadros y Tablas EstandaresDocument6 pagesKomatsu 930E-4 Cuadros y Tablas EstandaresAnonymous m3tTeasYKNo ratings yet
- Komatsu 930E-4 Cuadros y Tablas EstandaresDocument6 pagesKomatsu 930E-4 Cuadros y Tablas EstandaresAnonymous m3tTeasYKNo ratings yet
- Problemas Maquinas Termicas 2000-IIDocument1 pageProblemas Maquinas Termicas 2000-IIAnonymous m3tTeasYKNo ratings yet
- Komatsu 930E-4 Seguridad GeneralDocument32 pagesKomatsu 930E-4 Seguridad GeneralAnonymous m3tTeasYKNo ratings yet
- Komatsu Información 930EDocument2 pagesKomatsu Información 930EAnonymous m3tTeasYKNo ratings yet
- Advertencias y precauciones del camión KomatsuDocument8 pagesAdvertencias y precauciones del camión KomatsuAnonymous m3tTeasYK0% (1)
- Ejercicios Termodinámica UNI 2003-IDocument1 pageEjercicios Termodinámica UNI 2003-IAnonymous m3tTeasYKNo ratings yet
- 2000-I Ejercicios TermodinámicaDocument1 page2000-I Ejercicios TermodinámicaAnonymous m3tTeasYKNo ratings yet
- Termodinámica Máquinas Térmicas 2002-IIDocument3 pagesTermodinámica Máquinas Térmicas 2002-IIAnonymous m3tTeasYKNo ratings yet
- La Obra de César MoroDocument95 pagesLa Obra de César MoroMar1975100% (3)
- Térmicas 2001-IIDocument1 pageTérmicas 2001-IIAnonymous m3tTeasYKNo ratings yet
- Esquemas de Conexión A TierraDocument13 pagesEsquemas de Conexión A TierraLuis Ernesto Neira RoperoNo ratings yet
- Evaluación Máquinas TérmicasDocument2 pagesEvaluación Máquinas TérmicasAnonymous m3tTeasYKNo ratings yet
- NFPA 780 2007-Mariani-TierraDocument137 pagesNFPA 780 2007-Mariani-TierraJhonny Yucra100% (2)