You might also like
- 5 - Charm - Tracy Wolff (Google Trasnlate)Document1,010 pages5 - Charm - Tracy Wolff (Google Trasnlate)L O L A43% (7)
- Curso moderno de máquinas eléctricas rotativas. Tomo III: Máquinas de corriente alterna asíncronasFrom EverandCurso moderno de máquinas eléctricas rotativas. Tomo III: Máquinas de corriente alterna asíncronasNo ratings yet
- Método de mallas para análisis de circuitos eléctricosDocument5 pagesMétodo de mallas para análisis de circuitos eléctricosJustin Jhon Gutierres QuispeNo ratings yet
- CUESTIONARIO DE FORMULAS para Solución de Circuitos Equivalentes de Generador de CD y Motor de CDDocument7 pagesCUESTIONARIO DE FORMULAS para Solución de Circuitos Equivalentes de Generador de CD y Motor de CDEmmanuel Lopez PeñafielNo ratings yet
- Maquinas Electricas EjerciciosDocument14 pagesMaquinas Electricas EjerciciosAlex PaulNo ratings yet
- Practica de Motor de Induccion de Rotor Devanado Parte 1Document9 pagesPractica de Motor de Induccion de Rotor Devanado Parte 1Marcos Ponce CelisNo ratings yet
- Correcion 3Document12 pagesCorrecion 3Wilson DiegoNo ratings yet
- GUIADocument2 pagesGUIAEdgardo G TrinidadNo ratings yet
- 2.3 ¿Qué componentes integran a la corriente de excitación de un transformador? ¿Cómo se consideran en el circuito equivalente del transformador? Las componentes son: Corriente de magnetización Corriente de pérdidas en el núcleo La corriente de magnetización se puede modelar por una resistencia Xm conectada a través de una fuente de voltaje primaria y la corriente de pérdidas en el núcleo se puede considerar como una resistencia RN conectada a través de la fuente de voltaje primaria. 2.4 ¿Qué es el flujo disperso de un transformador? ¿Por qué se considera como un inductor en el circuito equivalente del transformador? Son flujos que escapan del núcleo y pasan a través de solo uno de los devanados del transformador, estos escapan y producen una auto inductancia en las bobinas primarias y secundarias, por esta razón en el circuito equivalente del transformador se considera como un inductor. 2.5 ¿Enliste y describa los tipos de pérdidas que se presentan en un transformadoDocument13 pages2.3 ¿Qué componentes integran a la corriente de excitación de un transformador? ¿Cómo se consideran en el circuito equivalente del transformador? Las componentes son: Corriente de magnetización Corriente de pérdidas en el núcleo La corriente de magnetización se puede modelar por una resistencia Xm conectada a través de una fuente de voltaje primaria y la corriente de pérdidas en el núcleo se puede considerar como una resistencia RN conectada a través de la fuente de voltaje primaria. 2.4 ¿Qué es el flujo disperso de un transformador? ¿Por qué se considera como un inductor en el circuito equivalente del transformador? Son flujos que escapan del núcleo y pasan a través de solo uno de los devanados del transformador, estos escapan y producen una auto inductancia en las bobinas primarias y secundarias, por esta razón en el circuito equivalente del transformador se considera como un inductor. 2.5 ¿Enliste y describa los tipos de pérdidas que se presentan en un transformadoOscar AndradeNo ratings yet
- Calidad Servicio Salud CuscoDocument3 pagesCalidad Servicio Salud CuscoJosé Antonio AR100% (2)
- Examen de Maquinas 2 Preguntas TeoricasDocument2 pagesExamen de Maquinas 2 Preguntas TeoricasAnonymous gIfXPkiL9S100% (1)
- Arranque y Variacion de Velocidad en MotoresDocument39 pagesArranque y Variacion de Velocidad en MotoresChristian Choquehuanca PacoriNo ratings yet
- Diagrama Ediagrama en Bloques Del Inversorn Bloques Del InversorDocument3 pagesDiagrama Ediagrama en Bloques Del Inversorn Bloques Del InversorWilliam Gutierrez100% (1)
- Practica 4 Motor Sincrono Parte 1Document13 pagesPractica 4 Motor Sincrono Parte 1Alex Chuckybatman100% (2)
- Practica 2. Cambio de Giro de Un Motor de Corriente ContinuaDocument5 pagesPractica 2. Cambio de Giro de Un Motor de Corriente ContinuaTest100% (1)
- Proteccion de Maquinas SincronasDocument9 pagesProteccion de Maquinas SincronasVíctor AguilarNo ratings yet
- Sesion 2. Aspectos Constructivos Del TransformadorDocument12 pagesSesion 2. Aspectos Constructivos Del TransformadorKelvin MendozaNo ratings yet
- Examen Complexivo Periodo 56 (Primera Oportunidad)Document16 pagesExamen Complexivo Periodo 56 (Primera Oportunidad)Jorge Luis JervisNo ratings yet
- Documento Completo Maquinas SincronasDocument41 pagesDocumento Completo Maquinas SincronasMike Morales0% (1)
- Metodo de Punto A Punto para Calcular Corriente de Coirto CircuitoDocument2 pagesMetodo de Punto A Punto para Calcular Corriente de Coirto CircuitoJulio CedeñoNo ratings yet
- DinamoDocument49 pagesDinamoJulio Guerra C.No ratings yet
- Partes Fundamentales de Un Motor de Corriente DirectaDocument6 pagesPartes Fundamentales de Un Motor de Corriente DirectaSasha Arcila Gomez100% (1)
- Motores Paso A Paso de Reluctancia VariableDocument15 pagesMotores Paso A Paso de Reluctancia Variabledaboin100% (1)
- El Motor Compound DiferencialDocument1 pageEl Motor Compound DiferencialSantos Martinez0% (1)
- TTL Aplicaciones y ProblemasDocument116 pagesTTL Aplicaciones y Problemasjuvel_mtl_No ratings yet
- Prueba de Aislamiento A Motor ElectricoDocument6 pagesPrueba de Aislamiento A Motor ElectricoMarcos Ponce CelisNo ratings yet
- Arranque de Motores y Simbologia EuropeaDocument83 pagesArranque de Motores y Simbologia EuropeaOcayo Chuster0% (1)
- Principios Básicos de Operación de MotoresDocument1 pagePrincipios Básicos de Operación de MotoresMiguel AngelNo ratings yet
- Taller Final Redes Convertido J CDocument16 pagesTaller Final Redes Convertido J CJAVIER ESTEBAN LOPEZ CEBALLOSNo ratings yet
- Apuntes de Circuitos Electricos ProblemasDocument48 pagesApuntes de Circuitos Electricos Problemashhzavana0% (2)
- Preguntas Maquinas ElectricasDocument7 pagesPreguntas Maquinas ElectricasjoseluisriveraNo ratings yet
- Control PID de un circuito RLCDocument7 pagesControl PID de un circuito RLCMarisol Tancara RoqueNo ratings yet
- Inconvenientes de La Máquina SincronaDocument3 pagesInconvenientes de La Máquina SincronaLuisAldoNo ratings yet
- Control de Motor Electrico Trifasico Por Estacion de Botones para Control ReversibleDocument6 pagesControl de Motor Electrico Trifasico Por Estacion de Botones para Control ReversibleAdrian Millan MartinezNo ratings yet
- Mantenimiento PDFDocument17 pagesMantenimiento PDFLeonela SoriaNo ratings yet
- 1.cuestionario Dispositivos Optoelectronicos Agosto - Diciembre 2012Document3 pages1.cuestionario Dispositivos Optoelectronicos Agosto - Diciembre 2012Abisholita MecaTronics100% (1)
- Conmutadores 40ADocument5 pagesConmutadores 40AKewin Sánchez SánchezNo ratings yet
- Modelo de La Máquina SíncronaDocument37 pagesModelo de La Máquina SíncronaJulian M. RiañoNo ratings yet
- Circuitos 2Document22 pagesCircuitos 2luisNo ratings yet
- Compensación de La Potencia ReactivaDocument17 pagesCompensación de La Potencia ReactivaRanaguarNo ratings yet
- Transformador TrifasicoDocument16 pagesTransformador TrifasicoSaul AlejandroNo ratings yet
- Arranque y paro motor trifásico CADE SIMUDocument9 pagesArranque y paro motor trifásico CADE SIMUJOHAN QUI�ONEZNo ratings yet
- Preguntas TriacDocument3 pagesPreguntas TriacJuan Carlos Valencia TorresNo ratings yet
- Motores de Corriente AlternaDocument8 pagesMotores de Corriente Alternatiburon53No ratings yet
- Instrumentación Basada PCDocument6 pagesInstrumentación Basada PCGuadalupe Vela ElotNo ratings yet
- Transmision ElectricaDocument32 pagesTransmision Electricanojuferja50% (4)
- Transformador monofásico EE-PQ13 manualDocument38 pagesTransformador monofásico EE-PQ13 manualjuliocanalesNo ratings yet
- Curvas Del Motor de InduccionDocument2 pagesCurvas Del Motor de InduccionAlexanderPilataxiNo ratings yet
- Potencial AplicadoDocument8 pagesPotencial Aplicadotimoty mendezNo ratings yet
- Averías en Motores Trifásicos de InducciónDocument43 pagesAverías en Motores Trifásicos de InducciónjesusbarajasNo ratings yet
- Curvas par motor y par resistenteDocument2 pagesCurvas par motor y par resistenteYoni Alexis Moreno SisaNo ratings yet
- Practica 2-Lab 2020Document12 pagesPractica 2-Lab 2020Erik BermudezNo ratings yet
- Estados operativos de un SEP y conceptos de tensión eléctricaDocument10 pagesEstados operativos de un SEP y conceptos de tensión eléctricairving Gar. ANo ratings yet
- Control de Velocidad de Maquinas Ac IntroducciónDocument4 pagesControl de Velocidad de Maquinas Ac IntroducciónPríncipeIglecia CastellanosNo ratings yet
- Informe (Motor Monofásico)Document25 pagesInforme (Motor Monofásico)brayan sanchezNo ratings yet
- Principios de Generacion de C.A.Document27 pagesPrincipios de Generacion de C.A.juanhumbertosaldaNo ratings yet
- Variadores y Arrancadores de PotenciaDocument2 pagesVariadores y Arrancadores de PotenciaMichael FieldsNo ratings yet
- Motores de Corriente ContinuaDocument6 pagesMotores de Corriente Continuamikun_nNo ratings yet
- El Motor de Excitación en ParaleloDocument2 pagesEl Motor de Excitación en Paralelocamipo0075% (4)
- Operatividad con sistemas mecánicos, hidráulicos, neumáticos y eléctricos de máquinas e instalaciones para la transformación de políme. y su manten. QUIT0209From EverandOperatividad con sistemas mecánicos, hidráulicos, neumáticos y eléctricos de máquinas e instalaciones para la transformación de políme. y su manten. QUIT0209No ratings yet
- Que Es Un Generador ElectricoDocument3 pagesQue Es Un Generador Electricojosealfred0No ratings yet
- Tipos de TransformadoresDocument2 pagesTipos de Transformadoresjosealfred0No ratings yet
- Instrumentos de MedicionDocument2 pagesInstrumentos de Medicionjosealfred0No ratings yet
- Acero Al CarbonoDocument1 pageAcero Al Carbonojosealfred0No ratings yet
- Tipos de BridasDocument2 pagesTipos de Bridasjosealfred0No ratings yet
- Subestaciones ElectricasDocument2 pagesSubestaciones Electricasjosealfred0No ratings yet
- Partes de Un TransformadorDocument1 pagePartes de Un Transformadorjosealfred0No ratings yet
- Accesorios de TuberíasDocument2 pagesAccesorios de Tuberíasjosealfred0No ratings yet
- Motor ElectricoDocument5 pagesMotor Electricojosealfred0No ratings yet
- Arranque de MotoresDocument3 pagesArranque de Motoresjosealfred0No ratings yet
- Control 1-Qué Es Un PLCDocument2 pagesControl 1-Qué Es Un PLCArmando YPNo ratings yet
- Conductores ElectricosDocument2 pagesConductores Electricosjosealfred0No ratings yet
- CableDocument5 pagesCablejosealfred0No ratings yet
- Frenado de Un Motor Trifásico SíncronoDocument4 pagesFrenado de Un Motor Trifásico Síncronojosealfred0No ratings yet
- Partes de Un Motor CCDocument2 pagesPartes de Un Motor CCjosealfred0No ratings yet
- Motor EléctricoDocument5 pagesMotor Eléctricojosealfred0No ratings yet
- Introduccion A Las Instalaciones ElectricasDocument2 pagesIntroduccion A Las Instalaciones Electricasjosealfred0No ratings yet
- Tipos de calibradores vernierDocument3 pagesTipos de calibradores vernierjosealfred0100% (1)
- MICRÓMETRODocument3 pagesMICRÓMETROjosealfred0No ratings yet
- Re Lev AdoresDocument3 pagesRe Lev Adoresjosealfred0No ratings yet
- Principio de Funcionamiento de Un CapacitorDocument1 pagePrincipio de Funcionamiento de Un Capacitorjosealfred0No ratings yet
- La Empresa Es La Institución o Agente Económico Que Toma Las Decisiones Sobre La Utilización de Factores de La Producción para Obtener Los Bienes y Servicios Que Se Ofrecen en El MercadoDocument2 pagesLa Empresa Es La Institución o Agente Económico Que Toma Las Decisiones Sobre La Utilización de Factores de La Producción para Obtener Los Bienes y Servicios Que Se Ofrecen en El Mercadoestebitanv13No ratings yet
- Generador ElectricoDocument1 pageGenerador Electricojosealfred0No ratings yet
- RELEVADOR SOBRECARGA PROTECCIÓN MOTORDocument1 pageRELEVADOR SOBRECARGA PROTECCIÓN MOTORjosealfred0No ratings yet
- El AtomoDocument2 pagesEl Atomojosealfred0No ratings yet
- Ciclo OttoDocument2 pagesCiclo Ottojosealfred0No ratings yet
- ContactorDocument2 pagesContactorjosealfred0No ratings yet
- Conductor ElectricoDocument1 pageConductor Electricojosealfred0No ratings yet
- Tics Grau Antabamba AymaraesDocument232 pagesTics Grau Antabamba AymaraesEdwin Flores RojasNo ratings yet
- Desarrollo Guía N°3Document5 pagesDesarrollo Guía N°3gerley quirozNo ratings yet
- Eucocell 1000Document2 pagesEucocell 1000Samuel Laura HuancaNo ratings yet
- Taller Sobre La CrónicaDocument3 pagesTaller Sobre La CrónicaLaura Sofía TrujilloNo ratings yet
- Carros NuevosDocument6 pagesCarros NuevosAndres Moreno SandovalNo ratings yet
- Propuesta de Protocolo Nacional de Monitoreo de Calidad Del Aire 04.12.2...Document76 pagesPropuesta de Protocolo Nacional de Monitoreo de Calidad Del Aire 04.12.2...CASTILLO LIÑAN TANIA LESLIENo ratings yet
- Caso Ladrillo Sindical Del SurDocument31 pagesCaso Ladrillo Sindical Del Surds fastNo ratings yet
- Características, monitoreo y evaluación del H2SDocument18 pagesCaracterísticas, monitoreo y evaluación del H2SCesar Samuel Justil OlivaresNo ratings yet
- AVILA MARTIN, CARMEN Los Recuentos Léxicos Con Indicación de La Frecuencia en Español VII JILH LISBOA 2018Document10 pagesAVILA MARTIN, CARMEN Los Recuentos Léxicos Con Indicación de La Frecuencia en Español VII JILH LISBOA 2018Maria Jose CarpizoNo ratings yet
- DS N°40 de 2012 MMA RSEIA PDFDocument105 pagesDS N°40 de 2012 MMA RSEIA PDFjavdelapenaNo ratings yet
- Implementación de 13 hectáreas de pimienta con tutores vivosDocument25 pagesImplementación de 13 hectáreas de pimienta con tutores vivosANDREA DIAZNo ratings yet
- Reyes - Tipos de Sociedades.Document42 pagesReyes - Tipos de Sociedades.valeriamejiac16No ratings yet
- Ejercicios de EstadísticaDocument34 pagesEjercicios de EstadísticaFernanda GarmendezNo ratings yet
- Contrato de Arrendamiento PardoDocument6 pagesContrato de Arrendamiento PardoPedroJulioBlancoDelgadoNo ratings yet
- Guía EPS informes 30 reglasDocument5 pagesGuía EPS informes 30 reglasNoe AguilarNo ratings yet
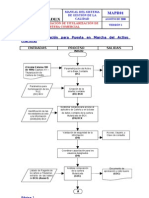
- Flujograma de ProcesosDocument9 pagesFlujograma de ProcesosAlcides ChanaNo ratings yet
- Diligencia de Levantamiento de CadáverDocument9 pagesDiligencia de Levantamiento de CadáverRodrigo AlcaNo ratings yet
- Convenio 138 de La OIT Sobre La Edad MínimaDocument9 pagesConvenio 138 de La OIT Sobre La Edad MínimaJoeBlackNo ratings yet
- Optica fisica - Optica geométricaDocument12 pagesOptica fisica - Optica geométricaMathe QuinteroNo ratings yet
- Masticacion Clinica de NiñoDocument18 pagesMasticacion Clinica de NiñoBibi MoleNo ratings yet
- Examen de Física MRU, MRUV y Tiro VerticalDocument1 pageExamen de Física MRU, MRUV y Tiro VerticalKevinNo ratings yet
- Lección 4 LAS ETAPAS DE PROYECTODocument9 pagesLección 4 LAS ETAPAS DE PROYECTOElizabeth de LeonNo ratings yet
- Recurso EV2Document6 pagesRecurso EV2humbertofisicoNo ratings yet
- 18.3.2.toma de DecisionesDocument5 pages18.3.2.toma de DecisionesRicardo QuesadaNo ratings yet
- Cristalografía y MineralogíaDocument24 pagesCristalografía y MineralogíaKevin ChavezNo ratings yet
- FORMA 3 Gabrila Jordan MartinezDocument3 pagesFORMA 3 Gabrila Jordan MartinezgustavoagsNo ratings yet
- 01 El Oficio Del Productor MusicalDocument34 pages01 El Oficio Del Productor MusicalFernando OrtegaNo ratings yet
- Bienes para LaboratorioDocument3 pagesBienes para LaboratorioEl chespy y sus amigos.No ratings yet