You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Pathe Projector Pathe Baby User ManualDocument23 pagesPathe Projector Pathe Baby User ManualzakskenNo ratings yet
- AGBT02-18 Guide To Bridge Technology Part 2 MaterialsDocument193 pagesAGBT02-18 Guide To Bridge Technology Part 2 MaterialsyasNo ratings yet
- CITI BankDocument504 pagesCITI Banksekhar_g5332No ratings yet
- Eaton70523 553partsDocument20 pagesEaton70523 553partsLeo VanNo ratings yet
- Cloudera Administrator Training Slides PDFDocument601 pagesCloudera Administrator Training Slides PDFeabernsteinNo ratings yet
- Parts Manual CB 434dDocument667 pagesParts Manual CB 434dMarceloGago100% (2)
- WPSDocument2 pagesWPSJuli Agus50% (2)
- Materials Engineer Test Reviewer-1Document47 pagesMaterials Engineer Test Reviewer-1Rodrigo Castillo Cacho93% (27)
- Japanese ParticlesDocument25 pagesJapanese Particlesxiceman0123100% (1)
- PV Module Safety Qualification According To IEC 61730:2004 EN 61730:2007Document6 pagesPV Module Safety Qualification According To IEC 61730:2004 EN 61730:2007Vinko RazlNo ratings yet
- Evo BSC 8200Document14 pagesEvo BSC 8200muhammadasifrashid78% (9)
- Amine Gas Sweetening Systems PsDocument3 pagesAmine Gas Sweetening Systems Pscanada_198020008918No ratings yet
- Shinsekai Yori ED - Wareta RingoDocument3 pagesShinsekai Yori ED - Wareta Ringoxiceman0123No ratings yet
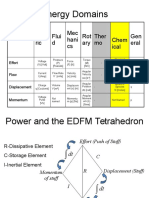
- Energy Domains: Elect Ric Flui D Mec Hani Cs Rot Ary Ther Mo Chem Ical Gen EralDocument3 pagesEnergy Domains: Elect Ric Flui D Mec Hani Cs Rot Ary Ther Mo Chem Ical Gen Eralxiceman0123No ratings yet
- Paper OutlineDocument1 pagePaper Outlinexiceman0123No ratings yet
- Ochem Solution Manual Chapt 2Document23 pagesOchem Solution Manual Chapt 2xiceman0123No ratings yet
- (Scales and Fingerings) Klengel - Technical Cello Studies Vol.1Document110 pages(Scales and Fingerings) Klengel - Technical Cello Studies Vol.1xiceman0123100% (11)
- Ochem Solution Manual Chapt 4Document22 pagesOchem Solution Manual Chapt 4xiceman0123No ratings yet
- Fluke T3 Voltage and Continuity TesterDocument2 pagesFluke T3 Voltage and Continuity Testerkoko MeNo ratings yet
- QED Chapter 11Document99 pagesQED Chapter 11Andrew HucekNo ratings yet
- Manual Cutmaster 82Document84 pagesManual Cutmaster 82Ferley Cruz100% (1)
- Ocused Ion Beam Microscopy and Micromachining: C.A. Volkert and A.M. Minor, Guest EditorsDocument11 pagesOcused Ion Beam Microscopy and Micromachining: C.A. Volkert and A.M. Minor, Guest EditorsrmehfuzNo ratings yet
- Series: 5-Axis Double Column Machine CenterDocument11 pagesSeries: 5-Axis Double Column Machine CenterPrs AutomationNo ratings yet
- SAP SRM TutorialDocument33 pagesSAP SRM TutorialNawed AnjumNo ratings yet
- Health REST API Specification 2.9.6 WorldwideDocument55 pagesHealth REST API Specification 2.9.6 WorldwideAll About Your Choose Entertain100% (5)
- Math Samples PDFDocument1 pageMath Samples PDFArwin VillegasNo ratings yet
- LG P503 SVC Eng 101008Document199 pagesLG P503 SVC Eng 101008MaxAllgeruNo ratings yet
- EDITED Module 1 5 UsedDocument55 pagesEDITED Module 1 5 UsedLenb AntonioNo ratings yet
- APIs and Business Functions GuideDocument104 pagesAPIs and Business Functions GuideSindhu RamNo ratings yet
- SQL Exercise-Text Book Table: DepartmentDocument22 pagesSQL Exercise-Text Book Table: DepartmentRafiq BashaNo ratings yet
- Anmlab 67 5451074084 5451074092Document9 pagesAnmlab 67 5451074084 5451074092Quoc Vuong HoangNo ratings yet
- Change Sequence's Current Value (CURRVAL) Without Dropping It OraExplorerDocument6 pagesChange Sequence's Current Value (CURRVAL) Without Dropping It OraExplorerIan HughesNo ratings yet
- Installation Instructions USB v1.0.21Document3 pagesInstallation Instructions USB v1.0.21Luis Alvaro MolinaNo ratings yet
- STP CivilDocument25 pagesSTP CivilRK PROJECT CONSULTANTSNo ratings yet
- Kroeplin - Katalog 2019 ENDocument24 pagesKroeplin - Katalog 2019 END.T.No ratings yet
- CQ BalancingDocument4 pagesCQ Balancingapi-218999959No ratings yet