You might also like
- Oral Pilot QualificationsDocument7 pagesOral Pilot QualificationsParas YadavNo ratings yet
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Ifr Classes: Basic Six PackDocument7 pagesIfr Classes: Basic Six PackIngrid SavellanoNo ratings yet
- Aircraft Conceptual Design Synthesis by Howe.D PDFDocument475 pagesAircraft Conceptual Design Synthesis by Howe.D PDFJackson Moncada100% (5)
- Why ATC Uses Aircraft Holding PatternsDocument28 pagesWhy ATC Uses Aircraft Holding PatternsMaitreya Shah100% (1)
- Atg Docs...Document12 pagesAtg Docs...Girish SreeneebusNo ratings yet
- Aircraft Landing GearDocument33 pagesAircraft Landing GearRoxanne Enero100% (2)
- Instrument Rating: Ninty Nine Flying SchoolDocument89 pagesInstrument Rating: Ninty Nine Flying SchoolMohamed HassanNo ratings yet
- IR Training PackageDocument85 pagesIR Training PackageAndrzej AndreNo ratings yet
- A320 For DummiesDocument223 pagesA320 For DummiesEmmanuel Adell82% (11)
- Aircraft InstrumentsDocument12 pagesAircraft Instrumentssaumya irugalbandaraNo ratings yet
- Fly 2Document9 pagesFly 2kjijiolll70% (10)
- Primary Flight Training: Ground SchoolDocument29 pagesPrimary Flight Training: Ground SchoolCarlos SievertNo ratings yet
- General Nav FORMULAE FILEDocument3 pagesGeneral Nav FORMULAE FILELondon 1234No ratings yet
- ATPL Inst 1.3 PDFDocument12 pagesATPL Inst 1.3 PDFKoustubh VadalkarNo ratings yet
- CAA Ref NAVDocument12 pagesCAA Ref NAVGirish Sreeneebus100% (1)
- Rejected Landing Recovery TechniquesDocument6 pagesRejected Landing Recovery TechniquesGirish SreeneebusNo ratings yet
- Notes of Capt. Salil Sharma For DA42 Question BankDocument15 pagesNotes of Capt. Salil Sharma For DA42 Question BankCrystal MurrayNo ratings yet
- Airbus Go Around EssentialsDocument28 pagesAirbus Go Around EssentialsGirish Sreeneebus100% (2)
- FlpanDocument8 pagesFlpanRaveendran Sukumaran PareshnathNo ratings yet
- Atr Fcom RN36 Dec14 PDFDocument1,233 pagesAtr Fcom RN36 Dec14 PDFGirish SreeneebusNo ratings yet
- Airbus Descent MonitoringDocument29 pagesAirbus Descent Monitoringapi-3805097100% (7)
- Airbus Descent MonitoringDocument29 pagesAirbus Descent Monitoringapi-3805097100% (7)
- Navigation Simulator v1 12Document60 pagesNavigation Simulator v1 12pilotmo100% (1)
- ATM The Pilots EnvironmentDocument25 pagesATM The Pilots EnvironmentNick TsangNo ratings yet
- Jeppesen Instrument/Commercial Manual - "Approach Charts" Chapter 7, Section A Instrument Flying Handbook 8-13 To 8-32Document4 pagesJeppesen Instrument/Commercial Manual - "Approach Charts" Chapter 7, Section A Instrument Flying Handbook 8-13 To 8-32intern_mikeNo ratings yet
- Measuring Altitude with AltimetryDocument13 pagesMeasuring Altitude with AltimetryMustaphaNo ratings yet
- VHF Omni-Range (VOR) Navigation System GuideDocument24 pagesVHF Omni-Range (VOR) Navigation System GuideNur AdlinaNo ratings yet
- Lesson 1Document52 pagesLesson 1Bravo NovemberNo ratings yet
- Basic & Advanced Instrument Maneuvers: IFR Briefing I2Document39 pagesBasic & Advanced Instrument Maneuvers: IFR Briefing I2Sandeep JangraNo ratings yet
- 14 Holding ProceduresDocument14 pages14 Holding ProceduresJuanaleNo ratings yet
- Circle To Land at High and Hot Altitude AirportsDocument17 pagesCircle To Land at High and Hot Altitude AirportsJ'boy Jacob100% (2)
- EASA Part-66 Exam Questions of Module 08 AerodynamicsDocument22 pagesEASA Part-66 Exam Questions of Module 08 AerodynamicsSteven J. Selcuk75% (4)
- 1 in 60 RuleDocument3 pages1 in 60 Rulegovin74No ratings yet
- Emergency Evacuation On GroundDocument16 pagesEmergency Evacuation On GroundGirish SreeneebusNo ratings yet
- Aerodynamics of Fuselage, Multhopp PDFDocument47 pagesAerodynamics of Fuselage, Multhopp PDFSuman DathathreyaNo ratings yet
- Navigating Holds with the POD MethodDocument8 pagesNavigating Holds with the POD MethodsujatanathvNo ratings yet
- Airspace Protection: By: Tahreem TariqDocument9 pagesAirspace Protection: By: Tahreem Tariq150 Qasim AliNo ratings yet
- 011 Part 11 Aerial Work and Operating Limitations For Non-Type Certificated Aircraft 7 2016Document58 pages011 Part 11 Aerial Work and Operating Limitations For Non-Type Certificated Aircraft 7 2016Jessie Bechayda0% (1)
- Lecture 15 - MET 4 Visibility, Icing, Documentation and Weather ChartsDocument17 pagesLecture 15 - MET 4 Visibility, Icing, Documentation and Weather ChartszackNo ratings yet
- How To Monitor The Descent - Descent Profile Management: Notional 3° G/S at VDocument1 pageHow To Monitor The Descent - Descent Profile Management: Notional 3° G/S at VbnolascoNo ratings yet
- IR Classes 5Document2 pagesIR Classes 5Ingrid SavellanoNo ratings yet
- A/THR Activation and RangeDocument4 pagesA/THR Activation and RangeMiroslav Stoyanov100% (5)
- Radio NavigationDocument96 pagesRadio NavigationSheena GuikingNo ratings yet
- Training Aid PDFDocument52 pagesTraining Aid PDFGirish Sreeneebus0% (1)
- An Introduction: Bryan Neville Aviation Safety Inspector Salt Lake City FSDODocument32 pagesAn Introduction: Bryan Neville Aviation Safety Inspector Salt Lake City FSDOGirish Sreeneebus100% (1)
- Ifr Classes: VOR FunctionalityDocument4 pagesIfr Classes: VOR FunctionalityIngrid SavellanoNo ratings yet
- Rejected Takeoff On Slippery Runway PDFDocument12 pagesRejected Takeoff On Slippery Runway PDFGirish SreeneebusNo ratings yet
- Falcon Aero Club (Salem) : Session 1Document2 pagesFalcon Aero Club (Salem) : Session 1karthipriyaNo ratings yet
- Abbreviations Used in Airway ManualDocument26 pagesAbbreviations Used in Airway Manualazx72No ratings yet
- My Notes - Easa Rules November 2022 - Victor RetanaDocument30 pagesMy Notes - Easa Rules November 2022 - Victor Retanasenyor tecnam100% (1)
- Drift Correction in The HoldDocument4 pagesDrift Correction in The HoldmartNo ratings yet
- Navigation - Exam 26 Feb 19 - Flattened PDFDocument163 pagesNavigation - Exam 26 Feb 19 - Flattened PDFmuhammad100% (1)
- Aeronautic Navigation InstrumentsDocument15 pagesAeronautic Navigation InstrumentsArief AminNo ratings yet
- Aviation English E LearningDocument37 pagesAviation English E LearningDenisaSocaciu59No ratings yet
- Erros, Agulhas GiroDocument29 pagesErros, Agulhas GiroGonçalo CruzeiroNo ratings yet
- 061 General NavigationDocument11 pages061 General NavigationMuneeb UlNo ratings yet
- Airbus Safety Lib Stop or GoDocument11 pagesAirbus Safety Lib Stop or Gof3nyxNo ratings yet
- A330 Syllabus CAEDocument20 pagesA330 Syllabus CAEeduardo50% (2)
- ATA22Document18 pagesATA22vv100% (1)
- This File Is Made From Within The Company. Uncontrolled Data. For Information OnlyDocument9 pagesThis File Is Made From Within The Company. Uncontrolled Data. For Information OnlyyayooNo ratings yet
- CBT TEST ANSWERSDocument1 pageCBT TEST ANSWERSGirish SreeneebusNo ratings yet
- CBT TEST ANSWERSDocument1 pageCBT TEST ANSWERSGirish SreeneebusNo ratings yet
- ATPL Nhom4 BDHKDocument114 pagesATPL Nhom4 BDHKVăn Thành NguyễnNo ratings yet
- Aircraft Instrument SystemDocument20 pagesAircraft Instrument SystemElizah WeriNo ratings yet
- #1 Airbus Safety First Mag - Jan 2005Document14 pages#1 Airbus Safety First Mag - Jan 2005upsasaNo ratings yet
- Proper Training: Class A. Class B. Class CDocument2 pagesProper Training: Class A. Class B. Class CSiva KumarNo ratings yet
- PayLoad Calculations PDFDocument15 pagesPayLoad Calculations PDFTim LinNo ratings yet
- IFR ACRONYMS and Required EquipmentDocument1 pageIFR ACRONYMS and Required EquipmentlunefiekertNo ratings yet
- 033 FLIGHT PLANNING&MONITORING SampleDocument4 pages033 FLIGHT PLANNING&MONITORING SampleRoman KovalenkoNo ratings yet
- Traffic PatternsDocument11 pagesTraffic PatternsrayaduqsNo ratings yet
- Crosswind Calculations Made EasyDocument2 pagesCrosswind Calculations Made EasyGede NandaNo ratings yet
- E6b Flight ComputerDocument20 pagesE6b Flight Computerİsmail SerinNo ratings yet
- (C P L) NavigationsupplementDocument33 pages(C P L) NavigationsupplementasenciNo ratings yet
- 111 Easa Radio Navigation DemoDocument6 pages111 Easa Radio Navigation DemoPrakash Kumawat100% (1)
- Discover the origins of Dutch roll aircraft motionDocument2 pagesDiscover the origins of Dutch roll aircraft motionGuilherme OliveiraNo ratings yet
- Iefing. 1. General 1.1. ATIS: 10-1P SchwechatDocument54 pagesIefing. 1. General 1.1. ATIS: 10-1P SchwechatbakteroNo ratings yet
- PPL Weight and BalanceDocument17 pagesPPL Weight and BalanceDyava SavitraNo ratings yet
- PP ADC Visual Flight RulesDocument3 pagesPP ADC Visual Flight RulesJuan Pablo RiveraNo ratings yet
- ICAO Phraseology Quick ReferenceDocument20 pagesICAO Phraseology Quick ReferenceSebastián Fonseca OyarzúnNo ratings yet
- V-Speeds (Cessna - 172)Document2 pagesV-Speeds (Cessna - 172)mahmoud deyaaNo ratings yet
- Licensing Requirements - Quick Reference-Rev5!01!07-2015 - Publication - V04Document29 pagesLicensing Requirements - Quick Reference-Rev5!01!07-2015 - Publication - V04Carlos Perez FerrerNo ratings yet
- 15atsbl03 - The Rnav VisualDocument8 pages15atsbl03 - The Rnav VisualLbrito01100% (1)
- Circuit Rejoining - Lesson 8Document2 pagesCircuit Rejoining - Lesson 8Dhruv JoshiNo ratings yet
- Flight Performance and Planning (Austria)Document71 pagesFlight Performance and Planning (Austria)Ana Teodora SNo ratings yet
- 4.8 Meteorology MetarsTafsDocument11 pages4.8 Meteorology MetarsTafsAlëxândër KošëNo ratings yet
- ATPL Flight PlanningDocument169 pagesATPL Flight PlanningTekam Samuel0% (4)
- Flight Forecast for MK320 from Mauritius to SeychellesDocument19 pagesFlight Forecast for MK320 from Mauritius to SeychellesGirish SreeneebusNo ratings yet
- Microscale Meteorological Mesoscale Synoptic Scale Microbursts Downbursts Thunderstorms MountainsDocument1 pageMicroscale Meteorological Mesoscale Synoptic Scale Microbursts Downbursts Thunderstorms MountainsGirish SreeneebusNo ratings yet
- Controlled Flight Into TerrainDocument1 pageControlled Flight Into TerrainGirish SreeneebusNo ratings yet
- Stop and No Go DecisionDocument1 pageStop and No Go DecisionGirish SreeneebusNo ratings yet
- Gregory 96 OCP VNAVDocument6 pagesGregory 96 OCP VNAVpangolin_79No ratings yet
- Pneumatic System: IsolationDocument6 pagesPneumatic System: IsolationGirish SreeneebusNo ratings yet
- Answer Grid PDFDocument1 pageAnswer Grid PDFGirish SreeneebusNo ratings yet
- Flight Crew Operating Manual (FCOM) ATR 72-500: Air MauritiusDocument1 pageFlight Crew Operating Manual (FCOM) ATR 72-500: Air MauritiusGirish SreeneebusNo ratings yet
- Getting Started PDFDocument1 pageGetting Started PDFGirish SreeneebusNo ratings yet
- Procedures & Techniques for ATR Aircraft OperationsDocument10 pagesProcedures & Techniques for ATR Aircraft OperationsGirish SreeneebusNo ratings yet
- Flight LawsDocument5 pagesFlight LawsGirish SreeneebusNo ratings yet
- A320 Flight LawsDocument5 pagesA320 Flight LawsRohit JoshiNo ratings yet
- 412 Avionics Maintenance PP Chap 03Document27 pages412 Avionics Maintenance PP Chap 03Anthony OkonkwoNo ratings yet
- Auto PilotDocument16 pagesAuto PilotJohn Ericsson RobariosNo ratings yet
- Different Types of Aircraft WingsDocument32 pagesDifferent Types of Aircraft Wingslalit vaishnav100% (1)
- Fabrication & Installation of Thorp T-211 WingDocument102 pagesFabrication & Installation of Thorp T-211 WingSudharSanNo ratings yet
- ATPL 010 TRAINING: Air Law Week-4b - VMC, IMC, SVFR & IFR RulesDocument41 pagesATPL 010 TRAINING: Air Law Week-4b - VMC, IMC, SVFR & IFR RulesBeril TiryakiNo ratings yet
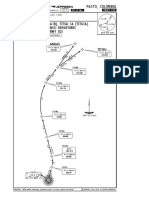
- Pasto, Colombia Skps/Pso: Ankas 1B (Anka1B), Titgu 1A (Titg1A) Rnav (GNSS) Departures (RWY 02)Document1 pagePasto, Colombia Skps/Pso: Ankas 1B (Anka1B), Titgu 1A (Titg1A) Rnav (GNSS) Departures (RWY 02)Alexandra DiazNo ratings yet
- Faa-Approved Pilot'S Operating Handbook and Airplane Flight Manual Supplement For TheDocument160 pagesFaa-Approved Pilot'S Operating Handbook and Airplane Flight Manual Supplement For TheBurnerNo ratings yet
- Checklist 737 Classic Wilco 737 PICDocument16 pagesChecklist 737 Classic Wilco 737 PICAlfonsoNo ratings yet
- Flight Management System - Wikipedia PDFDocument25 pagesFlight Management System - Wikipedia PDFPoonam YadavNo ratings yet
- Instrumentation 1Document8 pagesInstrumentation 1jeisNo ratings yet
- SBVT - Ils U or Loc U Rwy 24 - Iac - 20231130Document1 pageSBVT - Ils U or Loc U Rwy 24 - Iac - 20231130João Pedro Santos da CruzNo ratings yet
- The Instrument Landing System: Air Navigation NDB Approaches/Approach PlatesDocument11 pagesThe Instrument Landing System: Air Navigation NDB Approaches/Approach Platesc_s_wagon100% (1)
- Random Malfunctions# Communications ChecklistDocument1 pageRandom Malfunctions# Communications ChecklistAmr AlexNo ratings yet
- Normal Check List: DC9 DC9Document7 pagesNormal Check List: DC9 DC9Richard LundNo ratings yet
- Cyxy (Whitehorse Nielsen Intl) - R (25sep15) PDFDocument9 pagesCyxy (Whitehorse Nielsen Intl) - R (25sep15) PDFnabatmanNo ratings yet
- Dokumen - Tips Atpl Pof Principles of Flight Questions BankDocument32 pagesDokumen - Tips Atpl Pof Principles of Flight Questions BankfedeNo ratings yet
- A Design Approach & Selected Wind-Tunnel Results at High Subsonic Speeds For Wing-Tip Mounted Winglets PDFDocument33 pagesA Design Approach & Selected Wind-Tunnel Results at High Subsonic Speeds For Wing-Tip Mounted Winglets PDFsubha_aeroNo ratings yet
- Aircraft Status Report with Upcoming MaintenanceDocument80 pagesAircraft Status Report with Upcoming MaintenanceAndré CarneiroNo ratings yet
- Ksfoktus PDF 1686710157Document39 pagesKsfoktus PDF 1686710157Htay WinNo ratings yet
- Successive Loop ClosureDocument57 pagesSuccessive Loop Closureaslanım kralıçamNo ratings yet