You might also like
- Q LearningEmbeddedSineCosineAlgorithmQLESCADocument53 pagesQ LearningEmbeddedSineCosineAlgorithmQLESCAMBADJOUN DanielNo ratings yet
- Computerized Crime Tracking Information PDFDocument74 pagesComputerized Crime Tracking Information PDFHarikumar RajandranNo ratings yet
- Optimization of Geometry, Processes, Signals and Systems in Real World Engineering Problems by Cuckoo Search - A Survey of Recent LiteratureDocument9 pagesOptimization of Geometry, Processes, Signals and Systems in Real World Engineering Problems by Cuckoo Search - A Survey of Recent LiteratureshaliniNo ratings yet
- Structural Optimization Using Evolutionary Algorithms PDFDocument19 pagesStructural Optimization Using Evolutionary Algorithms PDFAyad SlabyNo ratings yet
- Implementation of The Sine - Cosine Algorithm To The Pressure Vessel Design ProblemDocument6 pagesImplementation of The Sine - Cosine Algorithm To The Pressure Vessel Design ProblemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Soil Classification and Crop Recommendation SystemDocument4 pagesSoil Classification and Crop Recommendation SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Heart Disease Prediction Using Machine Learning Techniques: A SurveyDocument9 pagesHeart Disease Prediction Using Machine Learning Techniques: A SurveyIJRASETPublicationsNo ratings yet
- IOT Air Sound Pollution MonitoringDocument8 pagesIOT Air Sound Pollution MonitoringgetahNo ratings yet
- IOT Based Air and Sound Pollution Monitoring SystemDocument3 pagesIOT Based Air and Sound Pollution Monitoring SystemEditor IJTSRDNo ratings yet
- Automatic Blood GroupingDocument18 pagesAutomatic Blood GroupingSuresh DharmarajuNo ratings yet
- Vehicle Number Plate Recognition System For Theft Detection IJERTV4IS020692Document5 pagesVehicle Number Plate Recognition System For Theft Detection IJERTV4IS020692shital shermaleNo ratings yet
- Soft Computing and Optimization AlgorithmsDocument27 pagesSoft Computing and Optimization AlgorithmsAndrew GarfieldNo ratings yet
- Intelligent Speed Adaptation & Accident Avoidance SeminarDocument20 pagesIntelligent Speed Adaptation & Accident Avoidance SeminartechaddiktNo ratings yet
- Anusha Technical FinalDocument24 pagesAnusha Technical FinalSarva PruthviNo ratings yet
- New Contributions To Load Flow Studies by The Method of Reduction and RestorationDocument7 pagesNew Contributions To Load Flow Studies by The Method of Reduction and RestorationncleninNo ratings yet
- Artificial Intelligence in Power SystemsDocument6 pagesArtificial Intelligence in Power SystemsVIVA-TECH IJRINo ratings yet
- Artificial Intelligence Dietitian SynopsisDocument7 pagesArtificial Intelligence Dietitian SynopsisAlly KhanNo ratings yet
- Traffic Lights Management Using Optimization ToolDocument8 pagesTraffic Lights Management Using Optimization Toolalisha shahidNo ratings yet
- Seminar 7th SemDocument31 pagesSeminar 7th SemajitsinghrathoreNo ratings yet
- Seminar ReportDocument9 pagesSeminar ReportAbhinav KaushikNo ratings yet
- Implementing Talent in HotelsDocument14 pagesImplementing Talent in HotelsImrul StudioNo ratings yet
- Identification of Gender Difference and Homogeneous Population - Savitesh Kushwaha - Vol. 9 No. 1 Jan - June 2019Document14 pagesIdentification of Gender Difference and Homogeneous Population - Savitesh Kushwaha - Vol. 9 No. 1 Jan - June 2019Savitesh KushwahaNo ratings yet
- Automatic Number Plate RecognitionDocument6 pagesAutomatic Number Plate RecognitionIJRASETPublicationsNo ratings yet
- 5.helmet Detection For Traffic Rules Using Image Processing With Raspberry PiDocument2 pages5.helmet Detection For Traffic Rules Using Image Processing With Raspberry PidileeppatraNo ratings yet
- Touchless Touchscreen Seminar by Kayode Damilola SamsonDocument25 pagesTouchless Touchscreen Seminar by Kayode Damilola SamsonBobby ZackNo ratings yet
- Clustering Techniques and Their Applications in EngineeringDocument16 pagesClustering Techniques and Their Applications in EngineeringIgor Demetrio100% (1)
- Crypto Currency Forecasting Using Deep LearningDocument6 pagesCrypto Currency Forecasting Using Deep LearningKrios143No ratings yet
- Biometric Seminar ReportDocument15 pagesBiometric Seminar ReportAbhishekNo ratings yet
- Final New Pro v2.7 New12Document128 pagesFinal New Pro v2.7 New12Manjeet SinghNo ratings yet
- Genetic algorithms and optimization techniquesDocument10 pagesGenetic algorithms and optimization techniquestsnrao30No ratings yet
- Underwater Image Enhancement For Improving The Visual Quality by CLAHE TechniqueDocument5 pagesUnderwater Image Enhancement For Improving The Visual Quality by CLAHE TechniqueijsretNo ratings yet
- Vehicle Starting System Using Fingerprint SensorDocument18 pagesVehicle Starting System Using Fingerprint SensorVIKASH SINGHNo ratings yet
- IOT Based Air Pollution Monitoring and Controlling System Project ReportDocument16 pagesIOT Based Air Pollution Monitoring and Controlling System Project ReportVenkatNo ratings yet
- Automatic Number Plate RecognitionDocument24 pagesAutomatic Number Plate RecognitionLingu PatilNo ratings yet
- Smart Grid ReportDocument13 pagesSmart Grid ReportAlankrit SharmaNo ratings yet
- M.Phil Computer Science Biometric System ProjectsDocument3 pagesM.Phil Computer Science Biometric System ProjectskasanproNo ratings yet
- Literature Review On Single Image Super ResolutionDocument6 pagesLiterature Review On Single Image Super ResolutionEditor IJTSRDNo ratings yet
- Machine Learnign in CRDocument24 pagesMachine Learnign in CRAhmed AbdelazizNo ratings yet
- Intelligent Agent: A Variety of DefinitionsDocument6 pagesIntelligent Agent: A Variety of DefinitionsNaveen KumarNo ratings yet
- License Number Recognition of A Vehicle Using MATLABDocument20 pagesLicense Number Recognition of A Vehicle Using MATLABSaravan Lanka100% (1)
- Path Visualizer: Gaurav Rana 01 Abhishek Kumar Singh 17 Adarsh Singh 18 Mentor-Mrs. Huda KhanDocument18 pagesPath Visualizer: Gaurav Rana 01 Abhishek Kumar Singh 17 Adarsh Singh 18 Mentor-Mrs. Huda KhanNEWNo ratings yet
- IOT Based Manhole Detection and Monitoring SystemDocument8 pagesIOT Based Manhole Detection and Monitoring SystemIJRASETPublicationsNo ratings yet
- Machine Learning Reveals Fast Consumer TrendsDocument20 pagesMachine Learning Reveals Fast Consumer TrendsjyotiNo ratings yet
- Examination Staff Allotment SystemDocument2 pagesExamination Staff Allotment SystemDHARUN SMARTNo ratings yet
- Robotic Vision Systems: Dr. A. R. Jayan, ECE Dept., GEC SreekrishnapuramDocument22 pagesRobotic Vision Systems: Dr. A. R. Jayan, ECE Dept., GEC SreekrishnapuramAravind R KrishnanNo ratings yet
- Big Data New Tricks For EconometricsDocument27 pagesBig Data New Tricks For EconometricsKal_CNo ratings yet
- Facial Recognition and Face Mask Detection Using Machine LearningDocument65 pagesFacial Recognition and Face Mask Detection Using Machine Learningqwerty123No ratings yet
- Prediction of Heart Disease Using Logistic Regression AlgorithmDocument6 pagesPrediction of Heart Disease Using Logistic Regression AlgorithmIJRASETPublicationsNo ratings yet
- VI Sem Project - Instant Access To Healthcare Using AI - Voice Enabled Chat Bot - Group No - 3Document70 pagesVI Sem Project - Instant Access To Healthcare Using AI - Voice Enabled Chat Bot - Group No - 3Simran Singh100% (1)
- JwelleryDocument23 pagesJwellerySoham PandyaNo ratings yet
- Plant Leaf Disease DetectionDocument4 pagesPlant Leaf Disease DetectionIJIERT-International Journal of Innovations in Engineering Research and TechnologyNo ratings yet
- Modelling and Analysis of The Simple Water Heater SystemDocument4 pagesModelling and Analysis of The Simple Water Heater SystemJohandi PatriaNo ratings yet
- Face Recognition Using PCADocument30 pagesFace Recognition Using PCAamit15094775100% (6)
- Graphical Password Minor ReportDocument79 pagesGraphical Password Minor ReportLove KothariNo ratings yet
- Smart Energy MeterDocument16 pagesSmart Energy Meterjhansi gouravarapuNo ratings yet
- Slide 1-14+ Backpropagation (BP) AlgorithmDocument8 pagesSlide 1-14+ Backpropagation (BP) AlgorithmMatt MedrosoNo ratings yet
- Control Systems Vs Machine LearningDocument2 pagesControl Systems Vs Machine LearningSufiyan N-YoNo ratings yet
- Cyberbullying Detection On Twitter Using Machine Learning A ReviewDocument5 pagesCyberbullying Detection On Twitter Using Machine Learning A ReviewInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Partial-Update Adaptive Signal Processing: Design Analysis and ImplementationFrom EverandPartial-Update Adaptive Signal Processing: Design Analysis and ImplementationNo ratings yet
- Python FundamentalsDocument61 pagesPython FundamentalsAswathy CjNo ratings yet
- EcapDocument35 pagesEcapAswathy CjNo ratings yet
- Detailed Analysis of DC-Link Virtual Impedance-Based Suppression Method For Harmonics Interaction in High-Power PWM Current-Source Motor DrivesDocument13 pagesDetailed Analysis of DC-Link Virtual Impedance-Based Suppression Method For Harmonics Interaction in High-Power PWM Current-Source Motor DrivesAswathy CjNo ratings yet
- Python GraphsDocument22 pagesPython GraphsAswathy CjNo ratings yet
- Gateee QuestionsDocument15 pagesGateee QuestionsAswathy CjNo ratings yet
- ODocument8 pagesOAswathy CjNo ratings yet
- ODocument8 pagesOAswathy CjNo ratings yet
- ODocument8 pagesOAswathy CjNo ratings yet
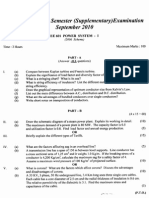
- Power Systems I Sept 2010 (2006 Ad)Document2 pagesPower Systems I Sept 2010 (2006 Ad)Aswathy CjNo ratings yet
- Ee Gate'13Document16 pagesEe Gate'13menilanjan89nLNo ratings yet
- Currents in A Single-Phase FWaveDocument8 pagesCurrents in A Single-Phase FWaveAswathy CjNo ratings yet
- PvimDocument6 pagesPvimAswathy CjNo ratings yet
- Engineering Mathematics - Sample Questions - Set-3Document3 pagesEngineering Mathematics - Sample Questions - Set-3Aswathy CjNo ratings yet
- Cusat DSP Question PaperDocument14 pagesCusat DSP Question PaperSabith PockerNo ratings yet
- Py4Inf 06 StringsDocument31 pagesPy4Inf 06 StringsAswathy CjNo ratings yet
- Meetings in English - Unit 3 PDFDocument4 pagesMeetings in English - Unit 3 PDFAswathy CjNo ratings yet
- Introduction To Python: Chen LinDocument51 pagesIntroduction To Python: Chen LinGiridhar SripathiNo ratings yet
- SensorsDocument46 pagesSensorsAswathy CjNo ratings yet
- Meetings in English - Unit 3 PDFDocument4 pagesMeetings in English - Unit 3 PDFAswathy CjNo ratings yet
- Math 450 Applied Probability ModelsDocument34 pagesMath 450 Applied Probability ModelsAswathy CjNo ratings yet
- Module2 New PartADocument6 pagesModule2 New PartAAswathy CjNo ratings yet
- Meetings in English - Unit 3 PDFDocument4 pagesMeetings in English - Unit 3 PDFAswathy CjNo ratings yet
- Meetings in English - Unit 3 PDFDocument4 pagesMeetings in English - Unit 3 PDFAswathy CjNo ratings yet
- Micro Hydro SummaryDocument9 pagesMicro Hydro SummaryAswathy CjNo ratings yet
- ECE 514 Nonlinear Adaptive Control Lecture NotesDocument4 pagesECE 514 Nonlinear Adaptive Control Lecture NotesAswathy CjNo ratings yet
- Electrical Machines III 2010 Sept (2006 Ad)Document2 pagesElectrical Machines III 2010 Sept (2006 Ad)Aswathy CjNo ratings yet
- GlobalisationDocument2 pagesGlobalisationAswathy CjNo ratings yet
- Automatic Street Light ControllerDocument1 pageAutomatic Street Light ControllerAswathy CjNo ratings yet
- Miller 1991Document12 pagesMiller 1991Osmel0% (1)
- Poster SwissmedicDocument1 pagePoster SwissmedicDavid Maycotte-CervantesNo ratings yet
- Res12 Module 2Document20 pagesRes12 Module 2Yanchen KylaNo ratings yet
- Bannon, Ford, Meltzer - Unknown - November 2011 The Cpa JournalDocument1 pageBannon, Ford, Meltzer - Unknown - November 2011 The Cpa JournalKimYuri0% (1)
- Analysis of code mixing in Boy William vlogsDocument7 pagesAnalysis of code mixing in Boy William vlogsKKNT Belaras2019No ratings yet
- RANSTUDYDocument9 pagesRANSTUDYClaire TacanNo ratings yet
- GHTF Sg5 n4 Post Market Clinical Studies 100218Document10 pagesGHTF Sg5 n4 Post Market Clinical Studies 100218India RoseNo ratings yet
- Electrical Resistivity of Concrete For Durability Evaluation: A ReviewDocument31 pagesElectrical Resistivity of Concrete For Durability Evaluation: A ReviewEhsanul KabirNo ratings yet
- I-Tree Eco Users Manual PDFDocument124 pagesI-Tree Eco Users Manual PDFYulinio Pari EugenioNo ratings yet
- Improving Diagnostic and Clinical InterviewingDocument6 pagesImproving Diagnostic and Clinical Interviewingoakley bart100% (1)
- 09 Multi-Equations Econometrics ModelDocument26 pages09 Multi-Equations Econometrics ModelSalonica Oktaviani LimbongNo ratings yet
- Eumind Self Reflection Tarun MoizuddinDocument2 pagesEumind Self Reflection Tarun Moizuddinapi-600146961No ratings yet
- Introduction To Psychology QuestionsDocument25 pagesIntroduction To Psychology QuestionsSritama GhoshNo ratings yet
- 2015 Ifom Cse Sig EnglishDocument3 pages2015 Ifom Cse Sig EnglishMongolian VVarriorNo ratings yet
- How Are Habits Formed - Modelling Habit Formation in The Real World PDFDocument13 pagesHow Are Habits Formed - Modelling Habit Formation in The Real World PDFWesley RicardoNo ratings yet
- Review of LiteratureDocument78 pagesReview of Literaturesm_bolke_422802317No ratings yet
- Thought Control and OcdDocument10 pagesThought Control and OcdCella100% (1)
- Anthelmintic Activity of Methanolic and Ethanolic Leaf Extract of Calendula OfficinalisDocument3 pagesAnthelmintic Activity of Methanolic and Ethanolic Leaf Extract of Calendula OfficinalisPerm PermNo ratings yet
- Effective Academic Writing - Haradan PDFDocument6 pagesEffective Academic Writing - Haradan PDFMansha D HaradanNo ratings yet
- Open Position Mensa GroupDocument2 pagesOpen Position Mensa GrouppermencokelatNo ratings yet
- Screenshot 2022-08-30 at 19.22.45Document57 pagesScreenshot 2022-08-30 at 19.22.45Garn Supratid2022No ratings yet
- Auteur Theory/auteurs: 16+ GuideDocument54 pagesAuteur Theory/auteurs: 16+ GuideBFI National Library100% (3)
- Kyyeu-Cohocdafull (2019)Document400 pagesKyyeu-Cohocdafull (2019)thuy giang0% (1)
- Final ProposalDocument5 pagesFinal Proposalapi-550445595No ratings yet
- Multiple Choice Sample QuestionsDocument4 pagesMultiple Choice Sample QuestionsThoa VũNo ratings yet
- Course Outline and Lecture ScheduleDocument2 pagesCourse Outline and Lecture ScheduleankurpachauriNo ratings yet
- Project AaDocument99 pagesProject AaLawrence Emmanuel100% (1)
- ARI Varmam Therapy Mail Today Article 25jan 2011Document1 pageARI Varmam Therapy Mail Today Article 25jan 2011Arts Research InstituteNo ratings yet
- Performance-Based Testing Assesses Student SkillsDocument3 pagesPerformance-Based Testing Assesses Student SkillsJay PeeNo ratings yet
- Rancangan Sistem Informasi Pencatatan Asuhan Medis Pasien Berbasis Elektronik Di Rumah Sakit Permata Medika Semarang Tahun 2015Document15 pagesRancangan Sistem Informasi Pencatatan Asuhan Medis Pasien Berbasis Elektronik Di Rumah Sakit Permata Medika Semarang Tahun 2015Ana NurlailyNo ratings yet