You might also like
- MeccanicaDocument140 pagesMeccanicatheodorNo ratings yet
- Esercizi ElettrotecnicaDocument28 pagesEsercizi ElettrotecnicaTizio Caio SempronioNo ratings yet
- Formulario Fisica 1Document15 pagesFormulario Fisica 1Matt Compierchio100% (1)
- Nozioni Di Geometria DifferenzialeDocument199 pagesNozioni Di Geometria DifferenzialeGiamaicoNo ratings yet
- FemDocument154 pagesFemGiovanniCuocoNo ratings yet
- LEZIONIDocument204 pagesLEZIONIGuido Davide Dall'OlioNo ratings yet
- Diagrammi Di BodeDocument30 pagesDiagrammi Di BodeElisabetta BrunoNo ratings yet
- Lezioni Di Meccanica RazionaleDocument286 pagesLezioni Di Meccanica RazionalekylgoreNo ratings yet
- Meccanica Razionale Capitolo 2 PDFDocument32 pagesMeccanica Razionale Capitolo 2 PDFCarmine Di VilioNo ratings yet
- Esami Svolti Di Geom. Proiettiva (Elementari)Document150 pagesEsami Svolti Di Geom. Proiettiva (Elementari)pixi1992No ratings yet
- Appunti 2007 - Meccanica Razionale Per L'ingegneria MuracchiniDocument55 pagesAppunti 2007 - Meccanica Razionale Per L'ingegneria MuracchiniLuca LatiniNo ratings yet
- Meccanica Razionale PARTE IVDocument93 pagesMeccanica Razionale PARTE IVJoseph MetrzNo ratings yet
- Capitolo - 1 Meccanica Analitica Giulio StaritaDocument40 pagesCapitolo - 1 Meccanica Analitica Giulio StaritadioscuritasNo ratings yet
- Soluzioni Commentate Gruppo 5Document3 pagesSoluzioni Commentate Gruppo 5Danilo BoschiNo ratings yet
- Esercizisvolti StampatiDocument40 pagesEsercizisvolti StampatiRoberta Federica Rik AcanforaNo ratings yet
- Meccanica&OtticaDocument4 pagesMeccanica&OtticaGianluigi SilvestreNo ratings yet
- 10) Meccanica Razionale Concetti BaseDocument130 pages10) Meccanica Razionale Concetti BaseDany StarkNo ratings yet
- Dispensa N.4Document15 pagesDispensa N.4fffiiutghyNo ratings yet
- Paniere Svolto Algebra Lineare e Geometria Ordine AlfabeticoDocument5 pagesPaniere Svolto Algebra Lineare e Geometria Ordine AlfabeticoAntonio PulliaNo ratings yet
- Geometria Degli Enti Lineari e Delle QuadricheDocument104 pagesGeometria Degli Enti Lineari e Delle QuadricheentrumNo ratings yet
- Cinematica Del PuntoDocument29 pagesCinematica Del Puntoleluz__No ratings yet
- Esercizi Sui VettoriDocument9 pagesEsercizi Sui VettoriVale MilesNo ratings yet
- HartreeDocument12 pagesHartreeioenopioNo ratings yet
- Moretti Esercizi Svolti Di Meccanica AnaliticaDocument190 pagesMoretti Esercizi Svolti Di Meccanica AnaliticaGerman ChiappeNo ratings yet
- 3-Vibrazioni LibereDocument39 pages3-Vibrazioni Libereq_giovanniNo ratings yet
- Elementi Di Geometria Analitica Nel Piano e Nello SpazioDocument27 pagesElementi Di Geometria Analitica Nel Piano e Nello SpazioEnrico VoltanNo ratings yet
- Relazione Esercitazione Meccanica Applicata Alle MacchineDocument5 pagesRelazione Esercitazione Meccanica Applicata Alle MacchineFabri Hrnt BasileNo ratings yet
- OscilloscopioDocument14 pagesOscilloscopiogigionenbaNo ratings yet
- Equazione Di ShrodingerDocument4 pagesEquazione Di ShrodingerantonioNo ratings yet
- Elettromagnetismo ScrittoDocument2 pagesElettromagnetismo ScrittoFisica MusicaNo ratings yet
- Geometria Analitica PDFDocument32 pagesGeometria Analitica PDFgioioNo ratings yet
- Fluidodinamica - VerziccoDocument286 pagesFluidodinamica - VerziccoAntonioNo ratings yet
- Vettori LezDocument7 pagesVettori LezValerio Jackson MelucciNo ratings yet
- Moto CircolareDocument4 pagesMoto CircolareMarco Stiz DalpiazNo ratings yet
- Capitolo 01Document36 pagesCapitolo 01cannizzo45091No ratings yet
- Documenti Richiami Matem 13 14Document14 pagesDocumenti Richiami Matem 13 14Federico SansoneNo ratings yet
- 4 Elettrologia IIIDocument24 pages4 Elettrologia IIIRaffaele IavazzoNo ratings yet
- 07 - Appunti Di Geometria AnaliticaDocument15 pages07 - Appunti Di Geometria AnaliticaErasmo ModicaNo ratings yet
- R.B. Appunti SbobbinatiDocument58 pagesR.B. Appunti SbobbinatiAntonio PalombaNo ratings yet
- Algebra Lineare - VettoriDocument9 pagesAlgebra Lineare - VettoriFabrizio SchembariNo ratings yet
- Modulo 2 Problemi Sulle Coordinate Cartesiane e PolariDocument17 pagesModulo 2 Problemi Sulle Coordinate Cartesiane e PolariPio Antonio VigilanteNo ratings yet
- Arches DesignDocument12 pagesArches DesignStefano CorciolaniNo ratings yet
- Astrodinamica 4Document16 pagesAstrodinamica 4Sciro Da Scala CatoNo ratings yet
- Esercitazioni Uni ADocument18 pagesEsercitazioni Uni AMichele PalmieriNo ratings yet
- Diagrammi Di BodeDocument34 pagesDiagrammi Di BodeYassine MandarisNo ratings yet
- Goglio Comportamento Meccanico Dei MaterialiDocument102 pagesGoglio Comportamento Meccanico Dei MaterialiWilliam MoscaNo ratings yet
- Curve Nel PianoDocument13 pagesCurve Nel PianoElhibari OthmaneNo ratings yet
- Geometria AnaliticaDocument4 pagesGeometria AnaliticaJuan Camilo Sanchez MarinNo ratings yet
- Spazi ProiettiviDocument12 pagesSpazi Proiettivipixi1992No ratings yet
- Introduzione 2Masse-3Molle 2023Document31 pagesIntroduzione 2Masse-3Molle 2023Paola CattozzoNo ratings yet
- ElettrotecnicaDocument65 pagesElettrotecnicaMarcoSpanòNo ratings yet
- DISPENSE Geom - GalleggiantiDocument27 pagesDISPENSE Geom - GalleggiantiJacopo LeoniNo ratings yet
- Corpi RigidiDocument54 pagesCorpi RigidiTh3Fr1x ZelioNo ratings yet
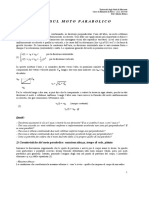
- Note Sul Moto ParabolicoDocument2 pagesNote Sul Moto Parabolicoparsec82No ratings yet
- Appunti Di Cinematic A - Moto ParabolicoDocument10 pagesAppunti Di Cinematic A - Moto ParabolicoantonietNo ratings yet
- Meccanica NewtonianaDocument73 pagesMeccanica NewtonianaNicola TonellottoNo ratings yet
- Es Fis2Document135 pagesEs Fis2Michele CacioppoNo ratings yet
- Criteri Di Sicurezza - Elio Sacco PDFDocument18 pagesCriteri Di Sicurezza - Elio Sacco PDFFerruccio RossiNo ratings yet
- Lezione 15 Strutture (Punzonamento)Document42 pagesLezione 15 Strutture (Punzonamento)Alessia VivianiNo ratings yet
- ICETECH Complete Range FolderDocument24 pagesICETECH Complete Range FolderarekNo ratings yet
- Catalogue Needle Valve PDFDocument18 pagesCatalogue Needle Valve PDFst_calvoNo ratings yet
- Program MaDocument66 pagesProgram MaGiuseppe Di MatteoNo ratings yet
- Falegnameria Online La Bottegga Di Mastro GeppettoDocument40 pagesFalegnameria Online La Bottegga Di Mastro GeppettogiuseppeNo ratings yet