You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Actorization AND Pproximation: Prof. Kaushik Roy at Purdue UnivDocument7 pagesActorization AND Pproximation: Prof. Kaushik Roy at Purdue UnivDr. Sampatrao L PinjareNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- A - C L P - Application Domain: Multi-Media Systems, Recognition, Mining, SynthesisDocument4 pagesA - C L P - Application Domain: Multi-Media Systems, Recognition, Mining, SynthesisDr. Sampatrao L PinjareNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- A DSP: L - P, U E P, & E R: Pplication TO OW Ower Nequal Rror Rotection Rror EsiliencyDocument11 pagesA DSP: L - P, U E P, & E R: Pplication TO OW Ower Nequal Rror Rotection Rror EsiliencyDr. Sampatrao L PinjareNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Approximate Full Adder CellsDocument11 pagesApproximate Full Adder CellsDr. Sampatrao L PinjareNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- R D R C C R: Educing THE Ynamic Ange OF Omputation AND Omplexity EductionDocument6 pagesR D R C C R: Educing THE Ynamic Ange OF Omputation AND Omplexity EductionDr. Sampatrao L PinjareNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Lock Ating: Prof. Kaushik Roy at Purdue UnivDocument8 pagesLock Ating: Prof. Kaushik Roy at Purdue UnivDr. Sampatrao L PinjareNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Canonical Signed Digits (CSD)Document5 pagesCanonical Signed Digits (CSD)Dr. Sampatrao L PinjareNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- E - C RCC: B I E R: Nergy Onsumption IN Ircuits A Rief Ntroduction TO Nergy EcoveryDocument8 pagesE - C RCC: B I E R: Nergy Onsumption IN Ircuits A Rief Ntroduction TO Nergy EcoveryDr. Sampatrao L PinjareNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- L - P Vlsi S P: L C D: OW Ower Ignal Rocessing OW Omplexity EsignDocument8 pagesL - P Vlsi S P: L C D: OW Ower Ignal Rocessing OW Omplexity EsignDr. Sampatrao L PinjareNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
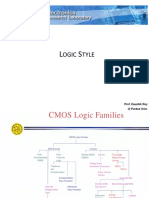
- Ogic Tyle: Prof. Kaushik Roy at Purdue UnivDocument10 pagesOgic Tyle: Prof. Kaushik Roy at Purdue UnivDr. Sampatrao L PinjareNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Ulti Upply Oltage: Prof. Kaushik Roy at Purdue UnivDocument5 pagesUlti Upply Oltage: Prof. Kaushik Roy at Purdue UnivDr. Sampatrao L PinjareNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Ariable Upply Oltage: Prof. Kaushik Roy at Purdue UnivDocument7 pagesAriable Upply Oltage: Prof. Kaushik Roy at Purdue UnivDr. Sampatrao L PinjareNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Bit-Serial Adder Using Partially Reversible LogicDocument9 pagesA Bit-Serial Adder Using Partially Reversible LogicDr. Sampatrao L PinjareNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- S - C P C: Hort Ircuit Ower OnsumptionDocument7 pagesS - C P C: Hort Ircuit Ower OnsumptionDr. Sampatrao L PinjareNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Estimation of Average Number of Transitions: Source: IntelDocument2 pagesEstimation of Average Number of Transitions: Source: IntelDr. Sampatrao L PinjareNo ratings yet
- Overview of MEMSDocument152 pagesOverview of MEMSDr. Sampatrao L PinjareNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Analog Layout UTLDocument3 pagesAnalog Layout UTLDr. Sampatrao L PinjareNo ratings yet
- MicrothrusterDocument1 pageMicrothrusterDr. Sampatrao L PinjareNo ratings yet
- Introduction To Analog Design: Dr. S. L. PinjareDocument65 pagesIntroduction To Analog Design: Dr. S. L. PinjareDr. Sampatrao L Pinjare100% (1)
- VLSI Implementation of Artificial Neural NetworkDocument26 pagesVLSI Implementation of Artificial Neural NetworkDr. Sampatrao L PinjareNo ratings yet
- Design of CMOS Low Dropout Voltage RegulatorDocument32 pagesDesign of CMOS Low Dropout Voltage RegulatorDr. Sampatrao L PinjareNo ratings yet
- 950 MW Coal Fired Power Plant DesignDocument78 pages950 MW Coal Fired Power Plant DesignJohn Paul Coñge Ramos0% (1)
- List of People in Playboy 1953Document57 pagesList of People in Playboy 1953Paulo Prado De Medeiros100% (1)
- Analisa RAB Dan INCOME Videotron TrenggalekDocument2 pagesAnalisa RAB Dan INCOME Videotron TrenggalekMohammad Bagus SaputroNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Interest Rates and Bond Valuation: All Rights ReservedDocument22 pagesInterest Rates and Bond Valuation: All Rights ReservedAnonymous f7wV1lQKRNo ratings yet
- Week 7 Apple Case Study FinalDocument18 pagesWeek 7 Apple Case Study Finalgopika surendranathNo ratings yet
- Creative Thinking (2) : Dr. Sarah Elsayed ElshazlyDocument38 pagesCreative Thinking (2) : Dr. Sarah Elsayed ElshazlyNehal AbdellatifNo ratings yet
- Relevant Cost For Decision: Kelompok 2Document78 pagesRelevant Cost For Decision: Kelompok 2prames tiNo ratings yet
- Writing Task The Strategy of Regional Economic DevelopementDocument4 pagesWriting Task The Strategy of Regional Economic DevelopementyosiNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- NIELIT Scientist B' Recruitment 2016 - Computer Science - GeeksforGeeksDocument15 pagesNIELIT Scientist B' Recruitment 2016 - Computer Science - GeeksforGeeksChristopher HerringNo ratings yet
- Bba Colleges in IndiaDocument7 pagesBba Colleges in IndiaSumit GuptaNo ratings yet
- Ficha Tecnica 320D3 GCDocument12 pagesFicha Tecnica 320D3 GCanahdezj88No ratings yet
- Design of Flyback Transformers and Filter Inductor by Lioyd H.dixon, Jr. Slup076Document11 pagesDesign of Flyback Transformers and Filter Inductor by Lioyd H.dixon, Jr. Slup076Burlacu AndreiNo ratings yet
- TP1743 - Kertas 1 Dan 2 Peperiksaan Percubaan SPM Sains 2023-20243Document12 pagesTP1743 - Kertas 1 Dan 2 Peperiksaan Percubaan SPM Sains 2023-20243Felix ChewNo ratings yet
- Time-Dependent Deformation of Shaly Rocks in Southern Ontario 1978Document11 pagesTime-Dependent Deformation of Shaly Rocks in Southern Ontario 1978myplaxisNo ratings yet
- Installation and User's Guide For AIX Operating SystemDocument127 pagesInstallation and User's Guide For AIX Operating SystemPeter KidiavaiNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Lenskart SheetDocument1 pageLenskart SheetThink School libraryNo ratings yet
- Application of ARIMAX ModelDocument5 pagesApplication of ARIMAX ModelAgus Setiansyah Idris ShalehNo ratings yet
- Audit Certificate: (On Chartered Accountant Firm's Letter Head)Document3 pagesAudit Certificate: (On Chartered Accountant Firm's Letter Head)manjeet mishraNo ratings yet
- Palm Manual EngDocument151 pagesPalm Manual EngwaterloveNo ratings yet
- CNG Fabrication Certificate16217Document1 pageCNG Fabrication Certificate16217pune2019officeNo ratings yet
- Huawei Core Roadmap TRM10 Dec 14 2011 FinalDocument70 pagesHuawei Core Roadmap TRM10 Dec 14 2011 Finalfirasibraheem100% (1)
- Milestone 9 For WebsiteDocument17 pagesMilestone 9 For Websiteapi-238992918No ratings yet
- Computer System Architecture: Pamantasan NG CabuyaoDocument12 pagesComputer System Architecture: Pamantasan NG CabuyaoBien MedinaNo ratings yet
- In Comparison With Oracle 8i, 9i Is Have Lot Many New Features. Important IsDocument241 pagesIn Comparison With Oracle 8i, 9i Is Have Lot Many New Features. Important IsBalaji ShindeNo ratings yet
- Remuneration Is Defined As Payment or Compensation Received For Services or Employment andDocument3 pagesRemuneration Is Defined As Payment or Compensation Received For Services or Employment andWitty BlinkzNo ratings yet
- Econ 1006 Summary Notes 1Document24 pagesEcon 1006 Summary Notes 1KulehNo ratings yet
- RetrieveDocument8 pagesRetrieveSahian Montserrat Angeles HortaNo ratings yet
- Preventive Maintenance - HematologyDocument5 pagesPreventive Maintenance - HematologyBem GarciaNo ratings yet
- Minor Project Report Format MCADocument11 pagesMinor Project Report Format MCAAnurag AroraNo ratings yet
- Majalah Remaja Islam Drise #09 by Majalah Drise - Issuu PDFDocument1 pageMajalah Remaja Islam Drise #09 by Majalah Drise - Issuu PDFBalqis Ar-Rubayyi' Binti HasanNo ratings yet