You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
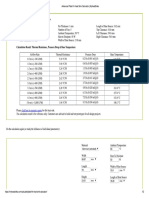
- Advanced Plate Fin Heat Sink Calculator - MyHeatSinksDocument2 pagesAdvanced Plate Fin Heat Sink Calculator - MyHeatSinksHarsh BhardwajNo ratings yet
- 7GCBC PohDocument75 pages7GCBC PohEyal Nevo100% (1)
- Vmware Validated Design 41 SDDC Architecture DesignDocument226 pagesVmware Validated Design 41 SDDC Architecture DesignmpuriceNo ratings yet
- Manual de TallerDocument252 pagesManual de TallerEdison RodriguezNo ratings yet
- Heinzmann ControlsDocument4 pagesHeinzmann ControlsShahzad AhmadNo ratings yet
- Tyco SprinklerDocument3 pagesTyco SprinklerVitor BrandaoNo ratings yet
- C D C SDocument4 pagesC D C SandriNo ratings yet
- Professional Project ManagementDocument2 pagesProfessional Project ManagementVirginia Virgie100% (3)
- MIL-W-22759 Rev E - Part34Document1 pageMIL-W-22759 Rev E - Part34David WongNo ratings yet
- Denr Administrative Order (Dao) 2013-22: (Chapters 6 & 8)Document24 pagesDenr Administrative Order (Dao) 2013-22: (Chapters 6 & 8)Karen Feyt Mallari100% (1)
- BK3251 BekenDocument13 pagesBK3251 BekenDanny DurhamNo ratings yet
- Despiece Completo ThwaittesDocument60 pagesDespiece Completo ThwaittesJuan Antonio Cano Diaz100% (1)
- Bubble Point Temperature - Ideal Gas - Ideal Liquid: TrialDocument4 pagesBubble Point Temperature - Ideal Gas - Ideal Liquid: TrialNur Dewi PusporiniNo ratings yet
- Using Gelatin For Moulds and ProstheticsDocument16 pagesUsing Gelatin For Moulds and Prostheticsrwong1231100% (1)
- AGC IPC Slash Sheet ReferenceDocument4 pagesAGC IPC Slash Sheet ReferenceSelvakumar NatarajanNo ratings yet
- Reckitt Benkiser (Case Study) For SCMDocument13 pagesReckitt Benkiser (Case Study) For SCMDiptiman GuhaNo ratings yet
- Section 1.0 Typical AMF PANEL Application WiringDocument2 pagesSection 1.0 Typical AMF PANEL Application WiringMAYUR GENSET100% (4)
- MF 3854 WDDocument96 pagesMF 3854 WDRizwanAli100% (1)
- NCP81243 Dual Output 3 & 2 Phase Controller With Single Intel Proprietary Interface For Desktop and Notebook CPU ApplicationsDocument26 pagesNCP81243 Dual Output 3 & 2 Phase Controller With Single Intel Proprietary Interface For Desktop and Notebook CPU ApplicationsAhmed Sherif CupoNo ratings yet
- Decline Curve AnalysisDocument37 pagesDecline Curve AnalysisAshwin VelNo ratings yet
- Presentation On FacebookDocument39 pagesPresentation On FacebookShaswat SinghNo ratings yet
- Fw102 User ManuleDocument12 pagesFw102 User ManulerobNo ratings yet
- NGO-CSR Internship Report TemplateDocument4 pagesNGO-CSR Internship Report TemplatePriyanka Singh100% (1)
- Pedoman Planologi PDFDocument187 pagesPedoman Planologi PDFRetno Kartika SariNo ratings yet
- 2008 Residential CF-1R ADDDocument8 pages2008 Residential CF-1R ADDDebo SodipoNo ratings yet
- UD05674B Baseline Access Control Terminal DS-KIT802 User Manual V2.0 20180228Document121 pagesUD05674B Baseline Access Control Terminal DS-KIT802 User Manual V2.0 20180228iresh jayasingheNo ratings yet
- Customers at SurveyDocument10 pagesCustomers at Surveynaren000No ratings yet
- Darcy Friction Loss Calculator For Pipes, Fittings & Valves: Given DataDocument2 pagesDarcy Friction Loss Calculator For Pipes, Fittings & Valves: Given DataMSNo ratings yet
- Spam DetectionDocument142 pagesSpam DetectionRahul GantaNo ratings yet
- Ds Lm5006 en Co 79839 Float Level SwitchDocument7 pagesDs Lm5006 en Co 79839 Float Level SwitchRiski AdiNo ratings yet