You might also like
- Calculational Methods for Interacting Arrays of Fissile Material: International Series of Monographs in Nuclear EnergyFrom EverandCalculational Methods for Interacting Arrays of Fissile Material: International Series of Monographs in Nuclear EnergyNo ratings yet
- Alumina Particle size-KPMDocument7 pagesAlumina Particle size-KPMrajeshayrNo ratings yet
- Xu2014 Article HighTemperatureMechanicalPerfoDocument8 pagesXu2014 Article HighTemperatureMechanicalPerfoFelipe MaestriNo ratings yet
- FS Iso PA6Document13 pagesFS Iso PA6adiNo ratings yet
- Zhao 2020 Mater. Res. Express 7 085201Document10 pagesZhao 2020 Mater. Res. Express 7 085201Arturo CervantesNo ratings yet
- 1 s2.0 S0142941802001277 MainDocument8 pages1 s2.0 S0142941802001277 MainCarla CostaNo ratings yet
- Accepted Manuscript: Nano EnergyDocument31 pagesAccepted Manuscript: Nano EnergymarwaNo ratings yet
- Composites Part B: D.A. Pohoryles, D.A. BournasDocument10 pagesComposites Part B: D.A. Pohoryles, D.A. BournasTesfayeNo ratings yet
- Effects of Silane Functionalization On The Properties of Carbon Nanotube/epoxy NanocompositesDocument8 pagesEffects of Silane Functionalization On The Properties of Carbon Nanotube/epoxy NanocompositespolypolyyNo ratings yet
- Zaludek 2020 IOP Conf. Ser. Mater. Sci. Eng. 726 012016Document8 pagesZaludek 2020 IOP Conf. Ser. Mater. Sci. Eng. 726 012016Salagrama AbhinavNo ratings yet
- Rao 2022 IOP Conf. Ser. Mater. Sci. Eng. 1248 012066Document10 pagesRao 2022 IOP Conf. Ser. Mater. Sci. Eng. 1248 012066Ahmed ismailNo ratings yet
- Materials Today: Proceedings: Akash Mani, Sumit SharmaDocument7 pagesMaterials Today: Proceedings: Akash Mani, Sumit SharmajacoboNo ratings yet
- ComposA Mertiny2002Document9 pagesComposA Mertiny2002Bhasker RamagiriNo ratings yet
- RDMS 000764Document8 pagesRDMS 000764centscoup1No ratings yet
- 1996 - Alternative Means For Evaluating Fibre-MatrixDocument8 pages1996 - Alternative Means For Evaluating Fibre-MatrixRushi TutorNo ratings yet
- Fracture of Fiber-Reinforced Composites Analyzed Via Acoustic EmissionDocument8 pagesFracture of Fiber-Reinforced Composites Analyzed Via Acoustic EmissionSubayyal IlyasNo ratings yet
- Composites Science and Technology: SciencedirectDocument10 pagesComposites Science and Technology: Sciencedirectfederico lamonNo ratings yet
- A.DORIGATO (2013) - Filler Aggregation As A Stiffening Mechanism in Polymer NanocompositesDocument43 pagesA.DORIGATO (2013) - Filler Aggregation As A Stiffening Mechanism in Polymer NanocompositesALDO CORDOBA GUERRERONo ratings yet
- Rectangular Hole 3D ReferenceDocument14 pagesRectangular Hole 3D ReferenceHanzla ZubairNo ratings yet
- Fabrication and Characterization of Tio - Epoxy NanocompositeDocument12 pagesFabrication and Characterization of Tio - Epoxy Nanocompositesur22as.aswarNo ratings yet
- Fracture Propertry - Geopolyme Cement Concerte+steel Fibre - 3 Point Bending Test - Crack - Tensile.Document6 pagesFracture Propertry - Geopolyme Cement Concerte+steel Fibre - 3 Point Bending Test - Crack - Tensile.Prasanth SekarNo ratings yet
- Effect Different Multi-Walled Carbon Nanotubes Mwcnts Type On Mechanical Properties of Epoxy Resin NanocompositesDocument6 pagesEffect Different Multi-Walled Carbon Nanotubes Mwcnts Type On Mechanical Properties of Epoxy Resin NanocompositesInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- An Investigation of The Mechanical Properties of PMMA-based Composites Reinforced With PZT Ternary NanoparticlesDocument6 pagesAn Investigation of The Mechanical Properties of PMMA-based Composites Reinforced With PZT Ternary NanoparticlesRennan Lima M. CastroNo ratings yet
- Composites Science and Technology: Su Zhao, Linda S. Schadler, Henrik Hillborg, Tommaso AulettaDocument7 pagesComposites Science and Technology: Su Zhao, Linda S. Schadler, Henrik Hillborg, Tommaso AulettamuhannadmahdiabdNo ratings yet
- 2024 HuangL - Fabrication of Fractal Ag Mesh FTO Transparent Electrodes HeatersDocument13 pages2024 HuangL - Fabrication of Fractal Ag Mesh FTO Transparent Electrodes HeatersfabioggbNo ratings yet
- Prediction of Tensile Strength of Polymer Carbon Nanotube Composites Using Practical Machine Learning MethodDocument66 pagesPrediction of Tensile Strength of Polymer Carbon Nanotube Composites Using Practical Machine Learning MethodAhmed ismailNo ratings yet
- Thir Uch It Rambal Am 2020Document8 pagesThir Uch It Rambal Am 2020Puneeth KumarNo ratings yet
- Materials Today: Proceedings: Narendra Kumar Jha, Santosh Kumar, Amit Tyagi, Dhirendra Kumar Jha, Chandra Shekhar JhaDocument5 pagesMaterials Today: Proceedings: Narendra Kumar Jha, Santosh Kumar, Amit Tyagi, Dhirendra Kumar Jha, Chandra Shekhar JhaAhmed ismailNo ratings yet
- Preprints201701 0112 v1Document17 pagesPreprints201701 0112 v1vikasNo ratings yet
- Mechanical Properties of E-Glass Fiber Reinforced Epoxy Composites With Sno and PtfeDocument7 pagesMechanical Properties of E-Glass Fiber Reinforced Epoxy Composites With Sno and PtfeGirish ShetNo ratings yet
- Nazemzadeh (2022) - Computing The Bond Strength of 3D Printed Polylactic Acid Scaffolds in Mode I and II Using Experimental Tests, Finite Element Method and Cohesive Zone ModelingDocument17 pagesNazemzadeh (2022) - Computing The Bond Strength of 3D Printed Polylactic Acid Scaffolds in Mode I and II Using Experimental Tests, Finite Element Method and Cohesive Zone ModelingIgnacio VillaNo ratings yet
- Pothnis Et Al 2019 MtrlLettersDocument4 pagesPothnis Et Al 2019 MtrlLettersjayaram-aeroNo ratings yet
- Physical, Mechanical and Thermal Properties of Jute and Bamboo Fiber Reinforced Unidirectional Epoxy CompositesDocument7 pagesPhysical, Mechanical and Thermal Properties of Jute and Bamboo Fiber Reinforced Unidirectional Epoxy Compositesdennisitty01No ratings yet
- Fibers 09 00078Document21 pagesFibers 09 00078نورس حميدةNo ratings yet
- Composites Science and Technology: Susan M. Rankin, Mikayla K. Moody, Amit K. Naskar, Christopher C. BowlandDocument8 pagesComposites Science and Technology: Susan M. Rankin, Mikayla K. Moody, Amit K. Naskar, Christopher C. Bowlandaagun1No ratings yet
- Efa PaperDocument9 pagesEfa Paperyash guptaNo ratings yet
- Mechin Et Al. - 2018 - An Experimental Protocol To Measure The Parameters Affecting The Compressive Strength of CFRP With A Fibre MicroDocument9 pagesMechin Et Al. - 2018 - An Experimental Protocol To Measure The Parameters Affecting The Compressive Strength of CFRP With A Fibre MicroPierre-Yves Harlé-MechinNo ratings yet
- Research ArticleDocument9 pagesResearch ArticlePankaj MunjalNo ratings yet
- Investigation On Interlaminar Shear Strength Properties of Disc Laser Machined Consolidated CF-PPS LaminatesDocument8 pagesInvestigation On Interlaminar Shear Strength Properties of Disc Laser Machined Consolidated CF-PPS LaminatesPaulo UtargNo ratings yet
- Composites Part B: P.-Y. Mechin, V. Keryvin, J.-C. GrandidierDocument7 pagesComposites Part B: P.-Y. Mechin, V. Keryvin, J.-C. GrandidierPierre-Yves Harlé-MechinNo ratings yet
- Composites: Part A: C.M. Stokes-Griffin, P. CompstonDocument8 pagesComposites: Part A: C.M. Stokes-Griffin, P. CompstonMerve Nur GüvenNo ratings yet
- IMPORTANT Evaluating The Effects of Multi-Walled Carbon Nanotubes IMPORTANTDocument7 pagesIMPORTANT Evaluating The Effects of Multi-Walled Carbon Nanotubes IMPORTANTMahalingam SNo ratings yet
- 1 s2.0 S0950061821003949 MainDocument15 pages1 s2.0 S0950061821003949 MainHO Vinh-QuynhNo ratings yet
- Contamine Et Al. 2011Document10 pagesContamine Et Al. 2011Komathi MuruganNo ratings yet
- Reinforcement of Rubbery Epoxy by Carbon Nanofibres: Short CommunicationDocument5 pagesReinforcement of Rubbery Epoxy by Carbon Nanofibres: Short CommunicationSara TeixeiraNo ratings yet
- Materials Today Communications: SciencedirectDocument11 pagesMaterials Today Communications: SciencedirectAhmed ismailNo ratings yet
- ItalyDocument18 pagesItalynamasse.medamineNo ratings yet
- 1 s2.0 S2666496821000406 MainDocument12 pages1 s2.0 S2666496821000406 MainzinaNo ratings yet
- Novel Infrared Terahertz Fusion 3D Non Invasive Imagi 2022 Composites SciencDocument10 pagesNovel Infrared Terahertz Fusion 3D Non Invasive Imagi 2022 Composites Sciencdeepali boradeNo ratings yet
- 5 - Acoperiri Ceramice-Pe PolimerDocument8 pages5 - Acoperiri Ceramice-Pe PolimerMazurchevici Andrei DănuţNo ratings yet
- 1ming Multiscale PDFDocument1 page1ming Multiscale PDFLeon MishnaevskyNo ratings yet
- IJETR2204Document2 pagesIJETR2204anil kasotNo ratings yet
- Study and Mechanical Testing of Fiber Re f2994962Document2 pagesStudy and Mechanical Testing of Fiber Re f2994962umar syarahilNo ratings yet
- Induced Ordering in Polyethylene Terephthalate Films Irradiated With Ar IonsDocument8 pagesInduced Ordering in Polyethylene Terephthalate Films Irradiated With Ar IonsJotaNo ratings yet
- Chemical Physics LettersDocument5 pagesChemical Physics LettersVansala GanesanNo ratings yet
- Material Today ProcDocument10 pagesMaterial Today ProcVikasKhatkarNo ratings yet
- Experimental Investigation On The Quasi-Static Crush Performance of Resin-Infused Thermoplastic 3D Fibre-Reinforced CompositesDocument6 pagesExperimental Investigation On The Quasi-Static Crush Performance of Resin-Infused Thermoplastic 3D Fibre-Reinforced Compositessaif ullahNo ratings yet
- Optimization of Sisal Fiber, Glass Fiber and Alumina - Based Hybrid Composite For Flexural Strength Using Taguchi TechniqueDocument12 pagesOptimization of Sisal Fiber, Glass Fiber and Alumina - Based Hybrid Composite For Flexural Strength Using Taguchi TechniqueIJRASETPublicationsNo ratings yet
- Garcia-Gonzales - Mechanical Impact Behavior of Polyether-Ether-KetoneDocument12 pagesGarcia-Gonzales - Mechanical Impact Behavior of Polyether-Ether-KetoneRafael ZanettiNo ratings yet
- Boccardi 2015Document5 pagesBoccardi 2015Yuzar StuffNo ratings yet
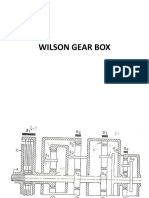
- Wilson Gear BoxDocument20 pagesWilson Gear Boxsonirocks100% (1)
- Poly-Phase Hydro-Kineamtic Torque ConvertorDocument8 pagesPoly-Phase Hydro-Kineamtic Torque Convertorsonirocks100% (3)
- Matlab IndexDocument2 pagesMatlab IndexsonirocksNo ratings yet
- Loops & Control ConstructsDocument55 pagesLoops & Control Constructssonirocks100% (1)
- Case StudiesDocument8 pagesCase StudiessonirocksNo ratings yet
- Proe Mechanism Les5Document11 pagesProe Mechanism Les5inthemoney8No ratings yet
- Proe Mechanism Les4Document13 pagesProe Mechanism Les4inthemoney8No ratings yet
- Vehicle Dynamics - Thomas DDocument38 pagesVehicle Dynamics - Thomas DJasbir Singh Dhanoa100% (1)
- Proe Mechanism Les1Document8 pagesProe Mechanism Les1sonirocksNo ratings yet
- Suspension Design by Ravi DeshmukhDocument11 pagesSuspension Design by Ravi DeshmukhsonirocksNo ratings yet
- Suspension Design Rajeev - MokashiDocument16 pagesSuspension Design Rajeev - MokashiJatin351100% (1)
- Big Data Executive Survey 2019 Findings Updated 010219 1Document16 pagesBig Data Executive Survey 2019 Findings Updated 010219 1satmaniaNo ratings yet
- Energy Epp1924 WildlifeAndAssetProtection EnglishDocument56 pagesEnergy Epp1924 WildlifeAndAssetProtection EnglishFalquian De EleniumNo ratings yet
- Behaviour Modification Testbank PDFDocument118 pagesBehaviour Modification Testbank PDFjade tagabNo ratings yet
- BF V CatalogDocument56 pagesBF V CatalogmaciasrobNo ratings yet
- Approaches To Curriculum DesigningDocument20 pagesApproaches To Curriculum DesigningCristel CatapangNo ratings yet
- MYP Unit Planner - MathDocument5 pagesMYP Unit Planner - MathMarija CvetkovicNo ratings yet
- Optimal Control Development System For ElectricalDocument7 pagesOptimal Control Development System For ElectricalCRISTIAN CAMILO MORALES SOLISNo ratings yet
- Getting Good Grades in School Is What Kids Are Supposed To Be Doing.Document6 pagesGetting Good Grades in School Is What Kids Are Supposed To Be Doing.The QUEENNo ratings yet
- MP65557-1 Manual Técnico - 4900Document371 pagesMP65557-1 Manual Técnico - 4900Tecnico IncoderNo ratings yet
- Rae Systems Parts List October 26 2010Document2 pagesRae Systems Parts List October 26 2010Mike HastingsNo ratings yet
- No 1 Method ValidationDocument2 pagesNo 1 Method ValidationdanaciortanNo ratings yet
- Exercicios de PhonicsDocument51 pagesExercicios de Phonicsms. TeixeiraNo ratings yet
- Adiba Final Activity CousellingDocument29 pagesAdiba Final Activity Cousellingadiba KhanNo ratings yet
- San Beda University: Integrated Basic Education DepartmentDocument3 pagesSan Beda University: Integrated Basic Education DepartmentEmil SamaniegoNo ratings yet
- Ai R16 - Unit-6Document36 pagesAi R16 - Unit-6RakeshNo ratings yet
- Industrial ReactorsDocument10 pagesIndustrial ReactorssarahNo ratings yet
- Slot 22-23-24 Real Time CommunicationDocument50 pagesSlot 22-23-24 Real Time CommunicationLinh BuiNo ratings yet
- Chapter Vii. Damascius and Hyperignorance: Epublications@BondDocument10 pagesChapter Vii. Damascius and Hyperignorance: Epublications@BondRami TouqanNo ratings yet
- Life Evolution Universe Lecture Notes - AUCDocument45 pagesLife Evolution Universe Lecture Notes - AUCAlejandro VerdeNo ratings yet
- Soundtrack: Aden LeeDocument7 pagesSoundtrack: Aden Lee이성진No ratings yet
- EE 720 - HW Set 3 - 1Document2 pagesEE 720 - HW Set 3 - 1Abdullah AL-RazemNo ratings yet
- Cloud Computing 101 TutorialDocument203 pagesCloud Computing 101 TutorialYunis Iklil100% (1)
- METR3210 Clausius ClapeyronDocument28 pagesMETR3210 Clausius Clapeyronshubhang2392No ratings yet
- Etrade Bank-StatementDocument5 pagesEtrade Bank-StatementMark Galanty100% (4)
- Finance and RiskDocument34 pagesFinance and RiskBlen tesfayeNo ratings yet
- Wind Tunnel Technique Notes For Aeronautical Engineers TP 2Document6 pagesWind Tunnel Technique Notes For Aeronautical Engineers TP 2Ramji VeerappanNo ratings yet
- Press Releases Are Not A PR Strategy An Executive Annas ArchiveDocument200 pagesPress Releases Are Not A PR Strategy An Executive Annas Archivehelenajosemacuacua31No ratings yet
- C-L-X® Type MC-HL (XHHW-2)Document3 pagesC-L-X® Type MC-HL (XHHW-2)Xin LiNo ratings yet
- Solar Water Heater MOU LaodiceaDocument2 pagesSolar Water Heater MOU LaodiceaZeeshan YasinNo ratings yet
- Physics 16 - Thermal ProcessesDocument19 pagesPhysics 16 - Thermal ProcessesSuhaan HussainNo ratings yet
- The Great Bridge: The Epic Story of the Building of the Brooklyn BridgeFrom EverandThe Great Bridge: The Epic Story of the Building of the Brooklyn BridgeRating: 4.5 out of 5 stars4.5/5 (59)
- Crossings: How Road Ecology Is Shaping the Future of Our PlanetFrom EverandCrossings: How Road Ecology Is Shaping the Future of Our PlanetRating: 4.5 out of 5 stars4.5/5 (10)
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda Cans (Father's Day Gift for Science and Engineering Curious Dads)From EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda Cans (Father's Day Gift for Science and Engineering Curious Dads)No ratings yet
- Rocks and Minerals of The World: Geology for Kids - Minerology and SedimentologyFrom EverandRocks and Minerals of The World: Geology for Kids - Minerology and SedimentologyRating: 4.5 out of 5 stars4.5/5 (5)
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda CansFrom EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda CansRating: 4.5 out of 5 stars4.5/5 (21)
- To Engineer Is Human: The Role of Failure in Successful DesignFrom EverandTo Engineer Is Human: The Role of Failure in Successful DesignRating: 4 out of 5 stars4/5 (138)
- Composite Structures of Steel and Concrete: Beams, Slabs, Columns and Frames for BuildingsFrom EverandComposite Structures of Steel and Concrete: Beams, Slabs, Columns and Frames for BuildingsNo ratings yet
- Troubleshooting and Repair of Diesel EnginesFrom EverandTroubleshooting and Repair of Diesel EnginesRating: 1.5 out of 5 stars1.5/5 (2)
- Finite Element Analysis and Design of Steel and Steel–Concrete Composite BridgesFrom EverandFinite Element Analysis and Design of Steel and Steel–Concrete Composite BridgesNo ratings yet
- Summary of Neil Postman's Amusing Ourselves to DeathFrom EverandSummary of Neil Postman's Amusing Ourselves to DeathRating: 4 out of 5 stars4/5 (2)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Geotechnical Engineering Calculations and Rules of ThumbFrom EverandGeotechnical Engineering Calculations and Rules of ThumbRating: 4 out of 5 stars4/5 (17)
- The Finite Element Method: Linear Static and Dynamic Finite Element AnalysisFrom EverandThe Finite Element Method: Linear Static and Dynamic Finite Element AnalysisRating: 5 out of 5 stars5/5 (3)
- Summary of Taiichi Ohno's Taiichi Ohno's Workplace ManagementFrom EverandSummary of Taiichi Ohno's Taiichi Ohno's Workplace ManagementNo ratings yet
- Structural Cross Sections: Analysis and DesignFrom EverandStructural Cross Sections: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (19)
- CAREC Road Safety Engineering Manual 3: Roadside Hazard ManagementFrom EverandCAREC Road Safety Engineering Manual 3: Roadside Hazard ManagementNo ratings yet
- Rock Fracture and Blasting: Theory and ApplicationsFrom EverandRock Fracture and Blasting: Theory and ApplicationsRating: 5 out of 5 stars5/5 (2)
- Construction Innovation and Process ImprovementFrom EverandConstruction Innovation and Process ImprovementAkintola AkintoyeNo ratings yet