You might also like
- Tech Vivasayi Mobile ApplicationDocument3 pagesTech Vivasayi Mobile ApplicationIJARTETNo ratings yet
- Complaint Box Mobile ApplicationDocument4 pagesComplaint Box Mobile ApplicationIJARTETNo ratings yet
- Smart Water Management System Using IoTDocument4 pagesSmart Water Management System Using IoTIJARTETNo ratings yet
- Wireless Notice Board With Wide RangeDocument5 pagesWireless Notice Board With Wide RangeIJARTETNo ratings yet
- Comparative Harmonics Analysis of ThreeDocument8 pagesComparative Harmonics Analysis of ThreeIJARTETNo ratings yet
- Non Invasive Blood Glucose Monitoring ForDocument4 pagesNon Invasive Blood Glucose Monitoring ForIJARTETNo ratings yet
- Ready To Travel ApplicationsDocument4 pagesReady To Travel ApplicationsIJARTETNo ratings yet
- Smart Farm Management System For PrecisionDocument5 pagesSmart Farm Management System For PrecisionIJARTETNo ratings yet
- Real Time Dynamic Measurements andDocument6 pagesReal Time Dynamic Measurements andIJARTETNo ratings yet
- Makeover Features Base Human IdentificationDocument7 pagesMakeover Features Base Human IdentificationIJARTETNo ratings yet
- Optimized Design and Manufacturing of WasteDocument5 pagesOptimized Design and Manufacturing of WasteIJARTETNo ratings yet
- Behaviour of Concrete by Using DifferentDocument3 pagesBehaviour of Concrete by Using DifferentIJARTETNo ratings yet
- Privacy Preservation of Fraud DocumentDocument4 pagesPrivacy Preservation of Fraud DocumentIJARTETNo ratings yet
- Object Detection and Alerting System inDocument4 pagesObject Detection and Alerting System inIJARTETNo ratings yet
- Hygienic and Quantity Based WaterDocument10 pagesHygienic and Quantity Based WaterIJARTETNo ratings yet
- Experimental Investigation On Concrete WithDocument18 pagesExperimental Investigation On Concrete WithIJARTETNo ratings yet
- A High-Availability Algorithm For HypercubeDocument8 pagesA High-Availability Algorithm For HypercubeIJARTETNo ratings yet
- Exam Seating ArrangementDocument3 pagesExam Seating ArrangementIJARTETNo ratings yet
- Study of Hypotenuse Slope of Chandrayaan-2 While Landing On The Moon SurfaceDocument3 pagesStudy of Hypotenuse Slope of Chandrayaan-2 While Landing On The Moon SurfaceIJARTETNo ratings yet
- Wireless Cardiac Patient Monitoring SystemDocument6 pagesWireless Cardiac Patient Monitoring SystemIJARTETNo ratings yet
- A Novel Artificial Neural Network and 2dPCABasedDocument9 pagesA Novel Artificial Neural Network and 2dPCABasedIJARTETNo ratings yet
- Application of Computer Vision in HumanDocument6 pagesApplication of Computer Vision in HumanIJARTETNo ratings yet
- A Non Threshold Based Cluster Head RotationDocument7 pagesA Non Threshold Based Cluster Head RotationIJARTETNo ratings yet
- Review On Field Testing of Protective RelaysDocument4 pagesReview On Field Testing of Protective RelaysIJARTETNo ratings yet
- Smart Door Using Raspberry PiDocument4 pagesSmart Door Using Raspberry PiIJARTETNo ratings yet
- Power Transformer Explained PracticallyDocument4 pagesPower Transformer Explained PracticallyIJARTETNo ratings yet
- Insect Detection Using Image Processing and IoTDocument4 pagesInsect Detection Using Image Processing and IoTIJARTETNo ratings yet
- Face Detection and Recognition Using Eigenvector Approach From Live StreamingDocument5 pagesFace Detection and Recognition Using Eigenvector Approach From Live StreamingIJARTETNo ratings yet
- Fire Detection and Alert System Using Convolutional Neural NetworkDocument6 pagesFire Detection and Alert System Using Convolutional Neural NetworkIJARTETNo ratings yet
- Review On Recycled Aluminium Dross and It's Utility in Hot Weather ConcretingDocument3 pagesReview On Recycled Aluminium Dross and It's Utility in Hot Weather ConcretingIJARTETNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Catalase TestDocument2 pagesCatalase TestsekaralingamNo ratings yet
- 10 STD Specifications - Building - 2018 (A1)Document902 pages10 STD Specifications - Building - 2018 (A1)Logan LiNo ratings yet
- Na-S BatteryDocument12 pagesNa-S Batterymeseret simachewNo ratings yet
- Water Supply Sanitary Eng PDFDocument5 pagesWater Supply Sanitary Eng PDFReddy NaveenNo ratings yet
- Mx37y Technical DescriptionDocument38 pagesMx37y Technical DescriptionVladimir PeshicNo ratings yet
- Parts Crane Hitachi FK600 - PRDocument2 pagesParts Crane Hitachi FK600 - PRDefly Gusti100% (1)
- Wave-Particle Duality FundamentalsDocument7 pagesWave-Particle Duality FundamentalsRahmatullahNo ratings yet
- SUNSLATES™ 6 PV Roof Tile - Award Winning Architectural AppealDocument2 pagesSUNSLATES™ 6 PV Roof Tile - Award Winning Architectural AppealFaeria20No ratings yet
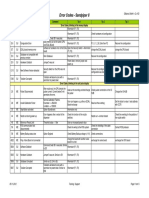
- Training Document: 120 113 304 f Gilbarco GmbH + Co. KG Error Codes - Sandpiper IIDocument5 pagesTraining Document: 120 113 304 f Gilbarco GmbH + Co. KG Error Codes - Sandpiper IICharlie ShowNo ratings yet
- Quat KrugerDocument52 pagesQuat Krugerruby0808No ratings yet
- 66 KV Design Parameters in GujaratDocument1 page66 KV Design Parameters in GujaratAkhilesh SolankiNo ratings yet
- Screw Compressor 6C1 Series 185S 185SRDocument79 pagesScrew Compressor 6C1 Series 185S 185SRthuan100% (1)
- FCRR19 (6) Kirkwood Matura-ShepherdDocument5 pagesFCRR19 (6) Kirkwood Matura-ShepherdRuslan ZakirovNo ratings yet
- An Impedance Source Multi-Level Three Phase Inverter With Common Mode Voltage Elimination and Dead Time CompensationDocument18 pagesAn Impedance Source Multi-Level Three Phase Inverter With Common Mode Voltage Elimination and Dead Time CompensationRadu GodinaNo ratings yet
- 30 International Cablemakers Federation Schroth PDFDocument25 pages30 International Cablemakers Federation Schroth PDFsajuaanalsaNo ratings yet
- Atomic Nucleus Facts and ConceptsDocument24 pagesAtomic Nucleus Facts and ConceptsKashyap PatelNo ratings yet
- Cooling Tower Research PaperDocument13 pagesCooling Tower Research PaperBhaskar KumarNo ratings yet
- Water Wash Procedure For EconomizerDocument3 pagesWater Wash Procedure For EconomizerRajendra100% (1)
- Igcse Economic Activity Revision PackDocument24 pagesIgcse Economic Activity Revision Packapi-232441790100% (2)
- Altronics DD Annunciator BLLTN 07-1996 PDFDocument4 pagesAltronics DD Annunciator BLLTN 07-1996 PDFSMcNo ratings yet
- F0358 CMM 010Document164 pagesF0358 CMM 010MJI EUWNo ratings yet
- Wires and Cables PDFDocument14 pagesWires and Cables PDFRomel Panis88% (8)
- Power Electronics For Renewable Energy Systems PDFDocument160 pagesPower Electronics For Renewable Energy Systems PDFSUSHITANo ratings yet
- IPL, Briggs, 14B907-0110-B1, 950 Series, EngineDocument25 pagesIPL, Briggs, 14B907-0110-B1, 950 Series, EngineGiacomo DesideriNo ratings yet
- Luminous PDFDocument1 pageLuminous PDFKushal AkbariNo ratings yet
- Nseallcompanies 31122020Document78 pagesNseallcompanies 31122020guy fawkesNo ratings yet
- Exercise 8-Life ScienceDocument2 pagesExercise 8-Life ScienceKarinaNo ratings yet
- Compressor Station MallnowDocument8 pagesCompressor Station MallnowMANIU RADU-GEORGIANNo ratings yet
- AD534Document12 pagesAD534Vaibhav GaurNo ratings yet
- Heat Exchangers of PolypropyleneDocument2 pagesHeat Exchangers of PolypropyleneTan So100% (1)