You might also like
- Robot Seguidor de Luz: Kit de Robótica MakerDocument3 pagesRobot Seguidor de Luz: Kit de Robótica MakerMATEO ESPINOSA100% (1)
- Lab NaoDocument14 pagesLab NaoDiego Di CalderónNo ratings yet
- Definición e Historia de RoboticaDocument2 pagesDefinición e Historia de RoboticaSandra LizarazoNo ratings yet
- Folleto TecnoDocument2 pagesFolleto TecnokaterinNo ratings yet
- GRUPO 3 - Evolución de Los AutomatasDocument9 pagesGRUPO 3 - Evolución de Los AutomatasJeyson IsraelNo ratings yet
- Fundamentos Básicos de Los RobotsDocument1 pageFundamentos Básicos de Los RobotsSebastian RochaNo ratings yet
- 04 ZowiDocument5 pages04 ZowiFredy Garcia ReyesNo ratings yet
- Micro Proyectos Escolar 4to EgbDocument6 pagesMicro Proyectos Escolar 4to EgbSono NetNo ratings yet
- Robótica educativa y componentes electrónicosDocument1 pageRobótica educativa y componentes electrónicosHUGO SERGIO MEDINA DE LA CRUZNo ratings yet
- Universidad Autonoma de Nuevo Leon Escuela y Preparatoria Técnica MedicaDocument65 pagesUniversidad Autonoma de Nuevo Leon Escuela y Preparatoria Técnica MedicaSofía RamírezNo ratings yet
- Proceso RobotizadoDocument38 pagesProceso RobotizadoTonatiuh SalmoranNo ratings yet
- La Robotizacion en Los Sistemas ProductivosDocument19 pagesLa Robotizacion en Los Sistemas ProductivosVivian de los Angeles Garcia TinocoNo ratings yet
- Manual Robotica - Electronica - 201501Document122 pagesManual Robotica - Electronica - 201501homeNo ratings yet
- RoboticaDocument2 pagesRoboticaLuz AndreaNo ratings yet
- Robot SCARA para siembraDocument6 pagesRobot SCARA para siembraKevin AlfonsoNo ratings yet
- Reglamento Secundaria Encuentro de Destreza Robótica OnlineDocument5 pagesReglamento Secundaria Encuentro de Destreza Robótica Onlinejose edgardo mamaniNo ratings yet
- Evaluación cuento Sueños de robot - AsimovDocument2 pagesEvaluación cuento Sueños de robot - AsimovDoriana FerraroNo ratings yet
- Dubai Como Ciudad CreativaDocument2 pagesDubai Como Ciudad CreativaJulian Carlos MacavilcaNo ratings yet
- Aplicaciones Robóticas IndustrialesDocument4 pagesAplicaciones Robóticas IndustrialesAndy SalanNo ratings yet
- Prueba Diagnóstica de Lenguaje y Comunicación 8voDocument7 pagesPrueba Diagnóstica de Lenguaje y Comunicación 8voconsuelo100% (1)
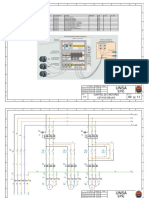
- DE Control de 3 Motores Lista de Dibujos: 29/12/16 29/12/16 29/12/16 CJCM CJCM CJCMDocument11 pagesDE Control de 3 Motores Lista de Dibujos: 29/12/16 29/12/16 29/12/16 CJCM CJCM CJCMJose Manuel Moa PerezNo ratings yet
- Presentacion Robotica EducativaDocument10 pagesPresentacion Robotica EducativaRonald Huanca CalleNo ratings yet
- Aplicación Del Cálculo Integral en El Análisis de Circuito Electrónico de Un RobotDocument2 pagesAplicación Del Cálculo Integral en El Análisis de Circuito Electrónico de Un RobotComi Comi ComeNo ratings yet
- La aplicación de los cobots para mejorar la industriaDocument4 pagesLa aplicación de los cobots para mejorar la industriaSebastian Gutierrez100% (1)
- Análisis de Documental-Fia-2020 - Nro 27 PDFDocument2 pagesAnálisis de Documental-Fia-2020 - Nro 27 PDFJosé RicaurteNo ratings yet
- Los robots más interesantes del mundo: Sophia y RobocoachDocument6 pagesLos robots más interesantes del mundo: Sophia y RobocoachByronAlexanderPacayNo ratings yet
- Historia de RobóticaDocument5 pagesHistoria de RobóticaJosue Chris Redfield AvilaNo ratings yet
- Tarea 2-RobotsDocument11 pagesTarea 2-RobotsJAIRO JAIR DE JESUS REYESNo ratings yet
- Analisis-Pelicula de Ciencia Ficcion Rodolfo Ramirez (Exp 2017203066)Document10 pagesAnalisis-Pelicula de Ciencia Ficcion Rodolfo Ramirez (Exp 2017203066)rodolfo ramirezNo ratings yet
- Trabajo Final UapaDocument7 pagesTrabajo Final UapaAlejandra AntonioNo ratings yet