You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
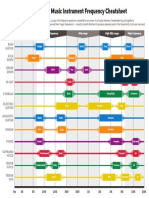
- Music Frequency Cheat SheetDocument1 pageMusic Frequency Cheat SheetLeonel Molina AlvaradoNo ratings yet
- SEDU Dynamic Analysis Procedure PDFDocument36 pagesSEDU Dynamic Analysis Procedure PDFgabelendaNo ratings yet
- Agma 914-B04Document45 pagesAgma 914-B04simone.castagnetti100% (2)
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Build Your Own Low-Power Transmitters: Projects for the Electronics ExperimenterFrom EverandBuild Your Own Low-Power Transmitters: Projects for the Electronics ExperimenterRating: 5 out of 5 stars5/5 (4)
- Echo Sounders: Asst. Prof. Dr. Ender AsyalıDocument33 pagesEcho Sounders: Asst. Prof. Dr. Ender AsyalıGf MilesNo ratings yet
- Bridge EquipmentsDocument14 pagesBridge EquipmentsSandipanBiswas100% (1)
- Horn PhysicsDocument29 pagesHorn PhysicsSubburam Srinivasan100% (1)
- 3D FinalDocument82 pages3D Finalkhan_69No ratings yet
- Perencanaan Dan Pembuatan Prototype Alat Pengolah Limbah Plastik Menjadi Bahan BakarDocument11 pagesPerencanaan Dan Pembuatan Prototype Alat Pengolah Limbah Plastik Menjadi Bahan BakarMeky Bima TokoNo ratings yet
- Echo SounderDocument13 pagesEcho SounderJackson Gray100% (1)
- Geotechnical - Investigation - For Bilika PV - Hybrid - Power - PlantDocument20 pagesGeotechnical - Investigation - For Bilika PV - Hybrid - Power - Plantmessay100% (1)
- Walking Listening SoundingDocument90 pagesWalking Listening SoundingManuel BrásioNo ratings yet
- Marine Health, Safety, Quality and Environmental Management: Guide ForDocument56 pagesMarine Health, Safety, Quality and Environmental Management: Guide ForgabelendaNo ratings yet
- JC Horne 1978Document33 pagesJC Horne 1978vaniaNo ratings yet
- Direct and Indirect Measurement of SoilDocument14 pagesDirect and Indirect Measurement of SoilGu GuimaNo ratings yet
- Side Scan Sonar Mod 272TD-Users-ManualDocument92 pagesSide Scan Sonar Mod 272TD-Users-Manualgabelenda0% (1)
- Geological Survey of India Training Institute Hyderabad: Exploration Geophysical Methods (Natural Source)Document50 pagesGeological Survey of India Training Institute Hyderabad: Exploration Geophysical Methods (Natural Source)Md HabibNo ratings yet
- Reservoir Rock Properties: Petroleum Geology AES/TA 3820Document41 pagesReservoir Rock Properties: Petroleum Geology AES/TA 3820aliy2k4uNo ratings yet
- COMCOT User Manual v1 7 PDFDocument65 pagesCOMCOT User Manual v1 7 PDFjesusoptimNo ratings yet
- IACS Wear of Chains - Guide For Anchoring Equipment in ServiceDocument10 pagesIACS Wear of Chains - Guide For Anchoring Equipment in ServicegabelendaNo ratings yet
- Marine Terminal Information Booklet Guidelines and Recommendations PDFDocument9 pagesMarine Terminal Information Booklet Guidelines and Recommendations PDFgabelenda0% (1)
- Vacuum Basics: Kinetic Theory of GasDocument19 pagesVacuum Basics: Kinetic Theory of GasFederico LeonNo ratings yet
- Modeling and Simulation of The Temperature Profile Along Offshore Pipeline of An Oil and Gas Flow: Effect of Insulation MaterialsDocument8 pagesModeling and Simulation of The Temperature Profile Along Offshore Pipeline of An Oil and Gas Flow: Effect of Insulation MaterialsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Effects of Soil Pollution On Geotechnical Behaviour of SoilsDocument8 pagesEffects of Soil Pollution On Geotechnical Behaviour of SoilsSupritha K100% (1)
- Impact of Mining Subsidence On Natural Gas PipelinDocument11 pagesImpact of Mining Subsidence On Natural Gas PipelinPranavNo ratings yet
- Effects of Crude Oil, Low Point Pour Fuel Oil and Vacuum Gas Oil Contamination On The Geotechnical Properties Sand, Clay and Laterite SoilsDocument8 pagesEffects of Crude Oil, Low Point Pour Fuel Oil and Vacuum Gas Oil Contamination On The Geotechnical Properties Sand, Clay and Laterite SoilsHyukLadezaNo ratings yet
- Manual - XL3t - MiningDocument27 pagesManual - XL3t - MiningHector Manuel GalvisNo ratings yet
- A08908 FelsSetal 103 PDFDocument870 pagesA08908 FelsSetal 103 PDFgabelenda100% (3)
- Geophysics Report AshegodaDocument34 pagesGeophysics Report AshegodaGechmcz100% (1)
- SBP IngDocument18 pagesSBP Ingdung_trinh_11No ratings yet
- Poseidon 3D Interpretation ReportDocument43 pagesPoseidon 3D Interpretation ReportBjorn Kjell-eric Asia100% (1)
- Dense Sand P-Y CurvesDocument8 pagesDense Sand P-Y CurvesBilal Adeel WithraNo ratings yet
- Suggested Methods For Geophysical Logging of Boreholes: Part 1. TechnicalDocument16 pagesSuggested Methods For Geophysical Logging of Boreholes: Part 1. TechnicalAntonio PedroNo ratings yet
- 1 Side-Scan Sonar PDFDocument3 pages1 Side-Scan Sonar PDFNur FatmalaNo ratings yet
- Bitumen MattsDocument2 pagesBitumen MattsWisnu BudiyantoNo ratings yet
- Method B14 - The Determination of The Dry Bulk Density, Apparent Relative Density and Water Absorption of Aggregate Retained On The 4,75 MM Sieve.Document3 pagesMethod B14 - The Determination of The Dry Bulk Density, Apparent Relative Density and Water Absorption of Aggregate Retained On The 4,75 MM Sieve.GUO LEINo ratings yet
- Jotun Malathon TDSDocument5 pagesJotun Malathon TDSBiju_PottayilNo ratings yet
- MethodologyDocument6 pagesMethodologySridhar DantuluriNo ratings yet
- 3001 User GuideDocument87 pages3001 User GuideDiogo Carlos E. Nathy CostaNo ratings yet
- MGS Geo Survey SpecificationDocument1 pageMGS Geo Survey SpecificationDanang Dwi HardoyoNo ratings yet
- Offshore Wells OverviewDocument30 pagesOffshore Wells Overviewsabina17njNo ratings yet
- 2017IPAfuturepetroleumplaytypesofIndonesiaSatyana2017 PDFDocument35 pages2017IPAfuturepetroleumplaytypesofIndonesiaSatyana2017 PDFAnonymous ujOX1ELNo ratings yet
- Bender Element Test: ObjectiveDocument6 pagesBender Element Test: ObjectiveNaman KantesariaNo ratings yet
- Pds Sikka Bajda Final 95mw May 09aaaDocument107 pagesPds Sikka Bajda Final 95mw May 09aaamizonexNo ratings yet
- Laporan Survey Batimetri KetapangDocument32 pagesLaporan Survey Batimetri KetapangKharisma JayatraNo ratings yet
- Geopulse: Pinger Sub Bottom ProfilerDocument2 pagesGeopulse: Pinger Sub Bottom ProfilerJuan Vicente Font CininiNo ratings yet
- API Standard Storage Tank Data Sheet Rev 0Document3 pagesAPI Standard Storage Tank Data Sheet Rev 0Guilherme B. BatistaNo ratings yet
- Analisis Dan Klasifikasi Sedimen Permukaan Dasar LDocument9 pagesAnalisis Dan Klasifikasi Sedimen Permukaan Dasar LBeby MarcNo ratings yet
- Solar Water Pumping Guidelines V1Document68 pagesSolar Water Pumping Guidelines V1Akash Chandra100% (1)
- Omv (Tunesien) Production GMBHDocument133 pagesOmv (Tunesien) Production GMBHEya AbdallahNo ratings yet
- Logiq Compensated Spectral Natural Gamma Ray (CSNG™) ToolDocument2 pagesLogiq Compensated Spectral Natural Gamma Ray (CSNG™) ToolChesy MeifaniNo ratings yet
- 2005 Effects of Petrophysical Rock Properties On Tortuosity Factor - Attia M. Attia PDFDocument14 pages2005 Effects of Petrophysical Rock Properties On Tortuosity Factor - Attia M. Attia PDFHafizhan Abidin SetyowiyotoNo ratings yet
- Appendix 2. Sub-Bottom ProfileDocument37 pagesAppendix 2. Sub-Bottom ProfileDik LanaNo ratings yet
- Pipeline NetworkDocument17 pagesPipeline Networkaymansh3204No ratings yet
- TRIGGERFISH Tech Overview March 2013Document27 pagesTRIGGERFISH Tech Overview March 2013Ndomadu100% (1)
- Marine and Land Seismic AquisitionDocument3 pagesMarine and Land Seismic AquisitionMiko Rc SevenNo ratings yet
- (MEKBAT) Analisa TeganganDocument157 pages(MEKBAT) Analisa Teganganrio0% (1)
- Reservoir in Bone Basin Use Basin Analysis Method: January 2015Document5 pagesReservoir in Bone Basin Use Basin Analysis Method: January 2015No RealitiNo ratings yet
- Channel Adjustments To Historical Disturbances Along The Lower Brazos and Sabine Rivers South Central USA 2014 GeomorphologyDocument17 pagesChannel Adjustments To Historical Disturbances Along The Lower Brazos and Sabine Rivers South Central USA 2014 GeomorphologyJose J.No ratings yet
- Small Hydro Mapping in IndonesiaDocument187 pagesSmall Hydro Mapping in IndonesiaSofan HadiNo ratings yet
- Brosur PaxDocument2 pagesBrosur PaxYulius Sampe DatuNo ratings yet
- RAI Attribute (Emujakporue Nigeria) PDFDocument11 pagesRAI Attribute (Emujakporue Nigeria) PDFFurqanButtNo ratings yet
- Geophysical Methods of Hydrocarbon ExplorationDocument30 pagesGeophysical Methods of Hydrocarbon ExplorationAshrafNo ratings yet
- The Elements and Importance of Site InvestigationDocument12 pagesThe Elements and Importance of Site InvestigationArun KhanNo ratings yet
- CSAMT System - Perbandingan Transmitter Metronix & PhoenixDocument4 pagesCSAMT System - Perbandingan Transmitter Metronix & Phoenixnugrohosyarif100% (1)
- Lampiran 1. Spesifikasi Kapal SeismikDocument11 pagesLampiran 1. Spesifikasi Kapal SeismikRangga Aji NugrahaNo ratings yet
- Ultrasonic Pulse Velocity in Concrete Using Direct and Indirect TDocument8 pagesUltrasonic Pulse Velocity in Concrete Using Direct and Indirect TBaehakiNo ratings yet
- Area and Volume ComputationsDocument12 pagesArea and Volume ComputationsAndrew SuiterNo ratings yet
- ABS Floating LNG Terminals.Document19 pagesABS Floating LNG Terminals.gabelendaNo ratings yet
- 493 NR - 2015 12Document64 pages493 NR - 2015 12Karan DoshiNo ratings yet
- Osv CodeDocument19 pagesOsv CodegabelendaNo ratings yet
- Perfilador Velocidad de Sonido Valeport Mod miniSVP - v2c PDFDocument1 pagePerfilador Velocidad de Sonido Valeport Mod miniSVP - v2c PDFgabelendaNo ratings yet
- Multibeam Reson Mod 8101Document2 pagesMultibeam Reson Mod 8101gabelendaNo ratings yet
- Schootel Rudder PropellerDocument1 pageSchootel Rudder Propellergabelenda100% (1)
- Audio TechDocument3 pagesAudio TechAlexNo ratings yet
- Analisa Harga: Pekerjaan: ElektrikalDocument2 pagesAnalisa Harga: Pekerjaan: ElektrikalMuhammad AndreNo ratings yet
- Eris E5XT E7XT and E8XT Owners Manual EN 01112021Document17 pagesEris E5XT E7XT and E8XT Owners Manual EN 01112021MkiliNo ratings yet
- Tipang Bulag-BulaganDocument1 pageTipang Bulag-BulaganCharles SulaymanNo ratings yet
- Building Environment 1: Acoustics: David Coley (6E2.22, D.a.coley@bath - Ac.uk)Document39 pagesBuilding Environment 1: Acoustics: David Coley (6E2.22, D.a.coley@bath - Ac.uk)jcforninoNo ratings yet
- Monitor Placement in Small Rooms - Resolution July August 09 SupplementDocument2 pagesMonitor Placement in Small Rooms - Resolution July August 09 SupplementRafał PiotrowskiNo ratings yet
- Intro To Engineering PhysicsDocument11 pagesIntro To Engineering PhysicsBrandon DaseNo ratings yet
- Acoustic Levitation of A Large Solid SphereDocument5 pagesAcoustic Levitation of A Large Solid SpheresathyakandadaNo ratings yet
- Data Sheet Waterfall Hurricane Evo in Wall Glass PDFDocument2 pagesData Sheet Waterfall Hurricane Evo in Wall Glass PDFVishal SuryawaniNo ratings yet
- 3MN0259 00 MN Acr 15500 Black Platinum Series Rev 3Document2 pages3MN0259 00 MN Acr 15500 Black Platinum Series Rev 3RezaRisdiNo ratings yet
- Impero 18A CabDocument18 pagesImpero 18A CabalbertoNo ratings yet
- Aero Acoustics of Fixed Wing and Rotary Wing AircraftDocument15 pagesAero Acoustics of Fixed Wing and Rotary Wing AircraftgarridolopezNo ratings yet
- Team5 FinalDocument24 pagesTeam5 Finalsathvika pingaliNo ratings yet
- Manual Isone Pro Surround v1.0.1 Pag8Document16 pagesManual Isone Pro Surround v1.0.1 Pag8Marcelo GustavoNo ratings yet
- Neve VR HandoutDocument14 pagesNeve VR HandoutAnton FoshNo ratings yet
- Bose Panaray 502 A, 502 B, and 502 BEX Loudspeakers: Technical InformationDocument4 pagesBose Panaray 502 A, 502 B, and 502 BEX Loudspeakers: Technical Informationjesus barriosNo ratings yet
- Studio Live Block Diagram WebDocument1 pageStudio Live Block Diagram WebNikola GrahovacNo ratings yet
- Public Address SystemDocument10 pagesPublic Address SystemCosmas AgochiNo ratings yet
- Brochure - Evox J SystemDocument8 pagesBrochure - Evox J SystemJairoGRNo ratings yet
- Lecture 4Document23 pagesLecture 4sumitstop2No ratings yet
- Acoustical Defects in Enclosed SpaceDocument48 pagesAcoustical Defects in Enclosed Spaceshyma_97No ratings yet
- Raincheck BrochureDocument4 pagesRaincheck BrochureNandini SNo ratings yet
- DRS 2018 Simeone Et Al. FinalDocument13 pagesDRS 2018 Simeone Et Al. FinalLuca SimeoneNo ratings yet
- Sound Energy: An Electric Source of Noise Pollution Based Power BankDocument12 pagesSound Energy: An Electric Source of Noise Pollution Based Power BankReyno Palabay0% (1)
- Datasheet HP 30Document1 pageDatasheet HP 30kyawoo.sgNo ratings yet
- US-4000 Echoscan: Operator'S ManualDocument177 pagesUS-4000 Echoscan: Operator'S ManualNC MauNo ratings yet