You might also like
- Electrical - Power - System - 1st PDFDocument262 pagesElectrical - Power - System - 1st PDFMedha AravindNo ratings yet
- Electrical - Power - System - 1st PDFDocument262 pagesElectrical - Power - System - 1st PDFMedha AravindNo ratings yet
- Docs Eeeemlnotes2013Document48 pagesDocs Eeeemlnotes2013Matthew AlexanderNo ratings yet
- Transmission Line Parameters PDFDocument47 pagesTransmission Line Parameters PDFMedha Aravind100% (3)
- 07a4ec03 Control Systems r07 2013 - Filescloud - inDocument2 pages07a4ec03 Control Systems r07 2013 - Filescloud - inMedha AravindNo ratings yet
- Nagoor Kani Control SystemsDocument209 pagesNagoor Kani Control SystemsAnonymous eWMnRr70q71% (35)
- Eee Formula SheetDocument147 pagesEee Formula SheetNaveen Kumar100% (1)
- B.Tech Power System Operation and Control Exam QuestionsDocument8 pagesB.Tech Power System Operation and Control Exam QuestionsMedha AravindNo ratings yet
- Lecture 15Document19 pagesLecture 15Medha AravindNo ratings yet
- Case Study Plant Layout 1Document22 pagesCase Study Plant Layout 1Gaurav ModiNo ratings yet
- 07a4ec03 Control Systems r07 2012 - Filescloud - inDocument1 page07a4ec03 Control Systems r07 2012 - Filescloud - inMedha AravindNo ratings yet
- Plant Layout-Material Handling 2Document2 pagesPlant Layout-Material Handling 2Karthik ChillaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Torque SteerDocument7 pagesTorque SteerAyushNo ratings yet
- Eksperimentalna BiohemijaDocument425 pagesEksperimentalna Biohemijaeminacengic5851No ratings yet
- Design of spiral resistance heating elementsDocument6 pagesDesign of spiral resistance heating elementsarg0nautNo ratings yet
- The Divine MatrixDocument3 pagesThe Divine MatrixDeWayne RobertsNo ratings yet
- Maxwell v16 L02 Geometry OperationsDocument30 pagesMaxwell v16 L02 Geometry OperationsVahidJam0% (1)
- Science 7 Exam 3rdDocument8 pagesScience 7 Exam 3rdEJ Atsilab100% (1)
- Introduction to Dynamic Meteorology 4th Edition ErrataDocument2 pagesIntroduction to Dynamic Meteorology 4th Edition ErrataSenju HerkNo ratings yet
- E 214 - 01 - Rtixna - PDFDocument3 pagesE 214 - 01 - Rtixna - PDFLeón SuárezNo ratings yet
- Case N-319-2 Alternate Procedure For Evaluation of Stresses in Butt Welding Elbows in Class 1 Piping Section III, Division 1Document2 pagesCase N-319-2 Alternate Procedure For Evaluation of Stresses in Butt Welding Elbows in Class 1 Piping Section III, Division 1Luis QuiñelNo ratings yet
- Moore-Penrose Pseudo Inverse ExplainedDocument3 pagesMoore-Penrose Pseudo Inverse ExplainedcmtinvNo ratings yet
- Fadum Chart SampleDocument3 pagesFadum Chart SampleSa'ad Abd Ar RafieNo ratings yet
- Kuressaare2007 181ruohoDocument5 pagesKuressaare2007 181ruohoSorn DarongNo ratings yet
- Prize-Winning Cameras For Prize-Winning PicturesDocument34 pagesPrize-Winning Cameras For Prize-Winning PicturesDocNo ratings yet
- Beer Dinamica - Capitulo 19 PDFDocument225 pagesBeer Dinamica - Capitulo 19 PDFSolorzano Chuquimantari JoubertNo ratings yet
- CH5100 Peristaltic FlowDocument21 pagesCH5100 Peristaltic FlowashuiskeshavNo ratings yet
- Phy Paper With Answer SolutionDocument11 pagesPhy Paper With Answer SolutionArifNo ratings yet
- Automatic Transfer Switch PDFDocument2 pagesAutomatic Transfer Switch PDFkummarai saileelaNo ratings yet
- Lowell W. Beineke & Robin J. Wilson & Peter J. Cameron - Topics in Algebraic Graph TheoryDocument293 pagesLowell W. Beineke & Robin J. Wilson & Peter J. Cameron - Topics in Algebraic Graph TheoryÖzkan Yılmaz100% (2)
- Statistical EnsemblesDocument11 pagesStatistical EnsemblesArnab Barman RayNo ratings yet
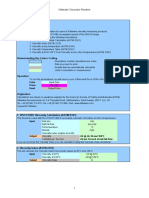
- Understanding The Colour Coding: Kittiwake Viscotube ReadmeDocument15 pagesUnderstanding The Colour Coding: Kittiwake Viscotube ReadmemusaveerNo ratings yet
- Module 6 Structure DynamicsDocument64 pagesModule 6 Structure DynamicswajidNo ratings yet
- Handbook of Supersonic Aerodynamics Volume - 3 - Sec - 7Document79 pagesHandbook of Supersonic Aerodynamics Volume - 3 - Sec - 7maurizio.desio4992No ratings yet
- Flow Assurance Study: Wolfgang Böser, Stefan BelfroidDocument13 pagesFlow Assurance Study: Wolfgang Böser, Stefan BelfroidAhmed RamadanNo ratings yet
- MS Excel in MathEdDocument57 pagesMS Excel in MathEdLesette Ambito PatricioNo ratings yet
- بحث عن الخلايا الكهروضوئيةDocument14 pagesبحث عن الخلايا الكهروضوئيةMoustafa Kh92No ratings yet
- A Study of Impurities in Intermediates and 3,4-Methylenedioxymethamphetamine (MDMA) Samples Produced Via Reductive Amination RoutesDocument17 pagesA Study of Impurities in Intermediates and 3,4-Methylenedioxymethamphetamine (MDMA) Samples Produced Via Reductive Amination RoutesandonovkaNo ratings yet
- 13 - Representations of The Angular Momentum Operators and Rotations PDFDocument17 pages13 - Representations of The Angular Momentum Operators and Rotations PDFUltrazordNo ratings yet
- Meredith Et Al. (1996) Measurement of The Microhardness and Young's Modulus of Human Enamel and Dentine Using An Indentation TechniqueDocument7 pagesMeredith Et Al. (1996) Measurement of The Microhardness and Young's Modulus of Human Enamel and Dentine Using An Indentation TechniqueMaja Maja BułkaNo ratings yet
- Problem Set - VIDocument2 pagesProblem Set - VInishanthNo ratings yet
- Glass - Fitting Calculation SheetDocument8 pagesGlass - Fitting Calculation SheetyosNo ratings yet