You might also like
- Control de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalFrom EverandControl de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalRating: 5 out of 5 stars5/5 (4)
- ARDUINO - Aplicaciones en Robótica, Mecatrónica e IngenieríasFrom EverandARDUINO - Aplicaciones en Robótica, Mecatrónica e IngenieríasRating: 5 out of 5 stars5/5 (1)
- Instrumentación electrónica aplicada: Prácticas de laboratorioFrom EverandInstrumentación electrónica aplicada: Prácticas de laboratorioRating: 3.5 out of 5 stars3.5/5 (7)
- Las Perspectivas de Calidad y Elementos Que Caracterizan Una Administración de CalidadDocument33 pagesLas Perspectivas de Calidad y Elementos Que Caracterizan Una Administración de CalidadSilvia Patricia Jaimes ArceNo ratings yet
- Diseno Narrativas Transmediaticas Gallego 2011Document103 pagesDiseno Narrativas Transmediaticas Gallego 2011Fabian Bonilla100% (3)
- Prog Robot KukaDocument63 pagesProg Robot Kuka77fenix100% (2)
- MEM ZiguratDocument30 pagesMEM ZiguratDavid Carballo RetanaNo ratings yet
- Libro de RoboticaDocument212 pagesLibro de RoboticaRn SaEnzNo ratings yet
- Cap1 - 10 IntroduccionDocument14 pagesCap1 - 10 IntroduccionLenin Casanova CNo ratings yet
- Proyecto de Tesis - Brazo RobóticoDocument17 pagesProyecto de Tesis - Brazo RobóticoVíctor Barreto VásquezNo ratings yet
- Taxonomías Sobre La CreatividadDocument11 pagesTaxonomías Sobre La CreatividadAdriana Lizeth Quezada Artunduaga100% (1)
- Currículum Jaime PachecoDocument13 pagesCurrículum Jaime PachecoCesar Polo GuNo ratings yet
- F-DC-04 Manual de Prácticas U3-4Document5 pagesF-DC-04 Manual de Prácticas U3-4EnriqueRomeroNo ratings yet
- Guia 2013-14 640 805G 20140916-132551 PDFDocument4 pagesGuia 2013-14 640 805G 20140916-132551 PDFferlbNo ratings yet
- CVtrivenoDocument7 pagesCVtrivenoФлавио ПересNo ratings yet
- Charla Robotica 1Document16 pagesCharla Robotica 1Emeldl QuintanarNo ratings yet
- Exposición Robotica, Punto 5Document4 pagesExposición Robotica, Punto 5Karina QuevedoNo ratings yet
- CV - Héctor Ramón Azcaray RiveraDocument4 pagesCV - Héctor Ramón Azcaray RiveraHéctor Azcaray RiveraNo ratings yet
- Aplicacion de La RoboticaDocument2 pagesAplicacion de La RoboticaMarcos Espinoza100% (1)
- Equipamiento y Tecnología en RobóticaDocument8 pagesEquipamiento y Tecnología en RobóticaHans Gabriel Tapara ZuñigaNo ratings yet
- Sistema de Información Científica: Red de Revistas Científicas de América Latina, El Caribe, España y PortugalDocument9 pagesSistema de Información Científica: Red de Revistas Científicas de América Latina, El Caribe, España y PortugalIrvin RamosNo ratings yet
- Maestria Ingenieria de Control y TelecomunicacionesDocument3 pagesMaestria Ingenieria de Control y TelecomunicacionesIsrrael PerezNo ratings yet
- Robotica 2Document7 pagesRobotica 2DEMETRIONo ratings yet
- 6to Diplomado Internacional en Automatización de Procesos Industriales Con Doble Certificación.. (-)Document6 pages6to Diplomado Internacional en Automatización de Procesos Industriales Con Doble Certificación.. (-)benjinavaNo ratings yet
- Ing MecanicaDocument31 pagesIng MecanicaaquiladiacciaioNo ratings yet
- Clase 1. Generalidades GETDocument12 pagesClase 1. Generalidades GETNatalia MantillaNo ratings yet
- Informe Robotica MecatronicaDocument21 pagesInforme Robotica MecatronicaWilfredo OlazabalNo ratings yet
- PROYECTO DE RoboticaDocument52 pagesPROYECTO DE RoboticaGutierrez Juan Eduardo100% (1)
- Ejercicio de Cad para DiseñoDocument94 pagesEjercicio de Cad para DiseñoPiero Sanchez Santa CruzNo ratings yet
- Informe Proyecto FinalDocument6 pagesInforme Proyecto FinalCarlos MontoyaNo ratings yet
- Teoría de Mecanismos y MáquinasDocument14 pagesTeoría de Mecanismos y MáquinasJhonmar JhonmarNo ratings yet
- Maestria en RoboticaDocument15 pagesMaestria en RoboticaOM2019No ratings yet
- Silabo Robotica 2016 IDocument5 pagesSilabo Robotica 2016 Ibay_2424No ratings yet
- La Robótica Es La Ciencia y La Tecnología de Los RobotsDocument11 pagesLa Robótica Es La Ciencia y La Tecnología de Los Robotsramosportillo86No ratings yet
- Perfil de Tesis CNC RevisiónDocument17 pagesPerfil de Tesis CNC RevisiónMiguel VelezNo ratings yet
- Sobrado Malpartida EddieDocument4 pagesSobrado Malpartida EddieAlvaro S. CáceresNo ratings yet
- Capitulo 1 BrazoDocument10 pagesCapitulo 1 Brazovicday2005No ratings yet
- DILIGENCIADO Justificación Nota Proyecto de GradoDocument2 pagesDILIGENCIADO Justificación Nota Proyecto de GradoJefferson MartinezNo ratings yet
- Etapa 1 Introducción A La Mecánica y Control de RobotsDocument52 pagesEtapa 1 Introducción A La Mecánica y Control de RobotsErick PalaciosNo ratings yet
- Sistemas Digitales II IELDocument3 pagesSistemas Digitales II IELRODRIGO RAMÓN BOLAÑOS SIFUENTESNo ratings yet
- Introduccion A La RoboticaDocument5 pagesIntroduccion A La RoboticaJose Eduardo AgisNo ratings yet
- Capitulo 1 BrazoDocument10 pagesCapitulo 1 Brazovicday2005No ratings yet
- Desarrollo de Un Robot Delta Como Plataforma Educativa para El Laboratorio de Mecatrónica de La Universidad Privada Del NorteDocument21 pagesDesarrollo de Un Robot Delta Como Plataforma Educativa para El Laboratorio de Mecatrónica de La Universidad Privada Del NortePrimus 2018No ratings yet
- Robot LaberintoDocument3 pagesRobot LaberintoMisael Yacob Sobrado ZambranoNo ratings yet
- RoboticaDocument24 pagesRoboticaDarwinAgudelo100% (1)
- Aplicaciones Robot ParalelosDocument28 pagesAplicaciones Robot ParalelosCasual CasualNo ratings yet
- TMG500 Marco Teorico Bellot Cuentas Roger EdsonDocument32 pagesTMG500 Marco Teorico Bellot Cuentas Roger EdsonJose Jamil Huacota GomezNo ratings yet
- Aplicaciones Industriales de La RoboticaDocument0 pagesAplicaciones Industriales de La RoboticaEduardo AngelNo ratings yet
- Título y Grado Académico OtorgadoDocument2 pagesTítulo y Grado Académico OtorgadoBlanca Eva Mendoza ApazaNo ratings yet
- Poster Definitivo y CorregidoDocument4 pagesPoster Definitivo y CorregidoYunier Alejandro MontillaNo ratings yet
- Ingenieria Automatizacion Robotica Folleto Admision 2015 UnabDocument18 pagesIngenieria Automatizacion Robotica Folleto Admision 2015 UnabJavier VillanuevaNo ratings yet
- Ejemplo 2 - Anteproyecto DesarrolladoDocument9 pagesEjemplo 2 - Anteproyecto DesarrolladoAlex Armando Torres BermúdezNo ratings yet
- Sin Título 3Document4 pagesSin Título 3Jose AlonsoNo ratings yet
- Presentaci¿ N 1 - Introducci¿ N A La Rob¿ TicaDocument1 pagePresentaci¿ N 1 - Introducci¿ N A La Rob¿ TicaFrancCurtSenccaNo ratings yet
- CV DR Héctor AzcarayDocument4 pagesCV DR Héctor AzcarayHéctor Azcaray RiveraNo ratings yet
- Carrito Evasor de ObstaculosDocument44 pagesCarrito Evasor de Obstaculospicatilio0% (1)
- SUSTENTACIONDocument11 pagesSUSTENTACIONDavid BaronNo ratings yet
- Robótica ColombianaDocument7 pagesRobótica Colombianaaula informaticaNo ratings yet
- 07557068castroaragonfernandoramiro 2018 MayoDocument7 pages07557068castroaragonfernandoramiro 2018 MayoRolando Aparicio Cueto OsorioNo ratings yet
- Perfil Xavier FreireDocument24 pagesPerfil Xavier FreireChrisnaj HuEkOЯnNo ratings yet
- Presentación Grupal PDFDocument11 pagesPresentación Grupal PDFJavier Philipp CercadoNo ratings yet
- Diseño Mecatrónico de Robot Móvil para Transporte de Carga en Superficies IrregularesDocument15 pagesDiseño Mecatrónico de Robot Móvil para Transporte de Carga en Superficies IrregularesKenny Leonardo Caceres PerezNo ratings yet
- 1.intalacion OpenStackDocument2 pages1.intalacion OpenStackFernandez LeoNo ratings yet
- Practica 9Document8 pagesPractica 9Fernandez LeoNo ratings yet
- Práctica 9Document6 pagesPráctica 9Fernandez LeoNo ratings yet
- Ultima PracticaDocument7 pagesUltima PracticaFernandez LeoNo ratings yet
- Cajete ProyectoDocument3 pagesCajete ProyectoFernandez LeoNo ratings yet
- D-FO-050 - Formato Registro de NotasDocument20 pagesD-FO-050 - Formato Registro de NotasFernandez LeoNo ratings yet
- Cosas de UDocument6 pagesCosas de UFernandez LeoNo ratings yet
- AlimentacionDocument4 pagesAlimentacionFernandez LeoNo ratings yet
- Informe 1 ElectronicaDocument16 pagesInforme 1 ElectronicaFernandez LeoNo ratings yet
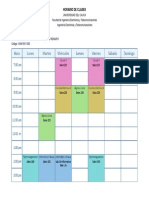
- Horario de ClasesDocument1 pageHorario de ClasesFernandez LeoNo ratings yet
- Ejercicios Resueltos de Transformaciones LinealesDocument2 pagesEjercicios Resueltos de Transformaciones LinealesJaimitoHerreraNo ratings yet
- Proyecto Reposición Parque AutomotorDocument11 pagesProyecto Reposición Parque AutomotorAndres ReyesNo ratings yet
- Ejercicios Resueltos de Transformaciones LinealesDocument2 pagesEjercicios Resueltos de Transformaciones LinealesJaimitoHerreraNo ratings yet
- Mall As Circuit OsDocument12 pagesMall As Circuit OsFernandez LeoNo ratings yet
- Control de Erosion de QuebradasDocument3 pagesControl de Erosion de QuebradasChristian Hernandez PizanNo ratings yet
- Planeacion Didactica DocumentoDocument15 pagesPlaneacion Didactica DocumentoSergio Cuautle JuarezNo ratings yet
- IntroducciónDocument65 pagesIntroducciónEnrike RobledoNo ratings yet
- Parte 1.-Diagnostico Metodologia y ArquitecturaDocument33 pagesParte 1.-Diagnostico Metodologia y ArquitecturaMaestra Prueba KNo ratings yet
- Guia de Actividades y Rubrica de Evaluacion - Fase 2 Diseño y Diagrama de Un ProblemaDocument11 pagesGuia de Actividades y Rubrica de Evaluacion - Fase 2 Diseño y Diagrama de Un ProblemaOlga Elisa Torres PalenciaNo ratings yet
- Terminos de Referencia - Raices Cafeteras - LinaresDocument30 pagesTerminos de Referencia - Raices Cafeteras - LinaresMiguel CórdobaNo ratings yet
- Silabo Control AutomaticoDocument14 pagesSilabo Control AutomaticoCharles AndradeNo ratings yet
- Noria Educacion y TecnologiaDocument56 pagesNoria Educacion y TecnologiaClaudia OvalleNo ratings yet
- LA - 1624 - 07047 - A - Admon - Estra - Operaciones - Bienes - Servicios Apuntes UNAMDocument83 pagesLA - 1624 - 07047 - A - Admon - Estra - Operaciones - Bienes - Servicios Apuntes UNAMpanaderowinsNo ratings yet
- Mapa Conceptual - Objetos Arquitectonicos - Vla2202001Document2 pagesMapa Conceptual - Objetos Arquitectonicos - Vla2202001Anna LeónNo ratings yet
- Core ToolsDocument9 pagesCore ToolsBRENDA AZENETH AGUILAR CARMONANo ratings yet
- Teoria NG Tema4Document128 pagesTeoria NG Tema4Jherson Fernando Huanaco PattiNo ratings yet
- Manual Diseño Estructural, PracticasDocument123 pagesManual Diseño Estructural, PracticasHectorOlmosNo ratings yet
- Evaluacion Del Diseño Logico Del SistemaDocument5 pagesEvaluacion Del Diseño Logico Del SistemaAnonymous MabcI0nbOvNo ratings yet
- Cartilla de Hierros IbagueDocument3 pagesCartilla de Hierros IbagueGabriel Morales OrtegaNo ratings yet
- ProteccionesDocument18 pagesProteccionesEsteban ColiqueoNo ratings yet
- Dirección y Diseño GráficoDocument2 pagesDirección y Diseño GráficooperaNo ratings yet
- Introduccion A AutoCAD - ProyeccionesDocument60 pagesIntroduccion A AutoCAD - ProyeccionesAlan Daniel GuillermoNo ratings yet
- RIBOT FrancescDocument17 pagesRIBOT FrancesccocoroNo ratings yet
- Organización Formal. Gomez Ceja Pag. 191-213 - 4. El Estudio de Las Organizaciones Pag. 2-29Document8 pagesOrganización Formal. Gomez Ceja Pag. 191-213 - 4. El Estudio de Las Organizaciones Pag. 2-29danielramirezmtNo ratings yet
- Planeacion MultimediaDocument72 pagesPlaneacion MultimediadavidNo ratings yet
- Módulo III Diseñar Bocetos y Patrones de Prendas de VestirDocument34 pagesMódulo III Diseñar Bocetos y Patrones de Prendas de VestirRobertGaetaNo ratings yet
- Influencias Del Pop Art en El Diseño Natalia ArenaDocument30 pagesInfluencias Del Pop Art en El Diseño Natalia ArenaFher MJNo ratings yet
- Fase 2 Diseño Exploratorio - LiscethDocument7 pagesFase 2 Diseño Exploratorio - Liscethraul poloNo ratings yet