You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Chapter 4Document9 pagesChapter 4dearsaswatNo ratings yet
- Ordinary Level Heat NotesDocument44 pagesOrdinary Level Heat Notespatrick omonyNo ratings yet
- 2012, An Algorithm For Autonomous Aerial Navigation Using MATLAB® Mapping Tool Box V66-159an Algorithm For Autonomous Aerial Navigation Using MATLAB® Mapping Tool BoxDocument4 pages2012, An Algorithm For Autonomous Aerial Navigation Using MATLAB® Mapping Tool Box V66-159an Algorithm For Autonomous Aerial Navigation Using MATLAB® Mapping Tool BoxAph MazharNo ratings yet
- Corning CRN 24 ALTOS 24FDocument3 pagesCorning CRN 24 ALTOS 24FSosialNo ratings yet
- Copia de GranulometriaDocument1 pageCopia de GranulometriaSantiago GiraldoNo ratings yet
- Geotechnical Aspects of Building Design (EN 1997) : Eurocode 2Document55 pagesGeotechnical Aspects of Building Design (EN 1997) : Eurocode 2margitorsiNo ratings yet
- Magnetic Field and Magnetic Effects of Current: Assignment 2Document2 pagesMagnetic Field and Magnetic Effects of Current: Assignment 2HaRryNo ratings yet
- Contacts Modeling in AnsysDocument74 pagesContacts Modeling in Ansyssudhirm16100% (2)
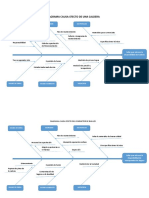
- Caldera causa-efecto diagrama mantenimiento fallasDocument2 pagesCaldera causa-efecto diagrama mantenimiento fallasDaniel Will Morales GuerreroNo ratings yet
- Topic 7 Problem Set 2016Document9 pagesTopic 7 Problem Set 2016Paul AmezquitaNo ratings yet
- Doob, The Development of Rigor in Mathematical Probability (1900-1950) PDFDocument11 pagesDoob, The Development of Rigor in Mathematical Probability (1900-1950) PDFFardadPouranNo ratings yet
- Dye Penetrant InspectionDocument18 pagesDye Penetrant InspectionMidhun K ChandraboseNo ratings yet
- Nano Spray Dryer B-90 - Literature Review and ApplicationsDocument8 pagesNano Spray Dryer B-90 - Literature Review and ApplicationsprinceamitNo ratings yet
- Theoretical Physics 1: Brwebberandchwbarnes Michaelmas Term 2008Document73 pagesTheoretical Physics 1: Brwebberandchwbarnes Michaelmas Term 200821260paco61No ratings yet
- Theory of Time MachineDocument127 pagesTheory of Time MachineUday HiwaraleNo ratings yet
- 4439testing MultipleDocument4 pages4439testing MultipleSonny RamosNo ratings yet
- 12-Story Steel Building AnalysisDocument505 pages12-Story Steel Building Analysissysyphus01100% (1)
- C 09Document8 pagesC 09Amal PereraNo ratings yet
- Pressure Transient Testing Vol 1Document686 pagesPressure Transient Testing Vol 1Luis100% (4)
- Index of Physics Lab Report on Refraction of LightDocument6 pagesIndex of Physics Lab Report on Refraction of LightSnehal VinodNo ratings yet
- Thermal System Simulation ProblemsDocument230 pagesThermal System Simulation ProblemsAanand Rishabh DagaNo ratings yet
- Press Fit Pressure Calculator - Optimize Your Interference - Transition Fit DesignDocument2 pagesPress Fit Pressure Calculator - Optimize Your Interference - Transition Fit Designankitsarvaiya100% (1)
- Performance Analysis of A Low-Speed High-Torque Hydrostatic Transmission UnitDocument61 pagesPerformance Analysis of A Low-Speed High-Torque Hydrostatic Transmission UnitbrunosamaeianNo ratings yet
- Advances in Phased Array Compound S-Scan DesignDocument18 pagesAdvances in Phased Array Compound S-Scan Designhcmcrlho100% (1)
- Chapter 5 - Energy Analysis For Open Systems Compatibility ModeDocument35 pagesChapter 5 - Energy Analysis For Open Systems Compatibility ModekhameesmarwanNo ratings yet
- Precast Bridge DeckDocument4 pagesPrecast Bridge DeckPaul_delgadoNo ratings yet
- Bridge Hydrology and Scour: Rajendra Raj Sharma Department of RoadsDocument40 pagesBridge Hydrology and Scour: Rajendra Raj Sharma Department of RoadsGaurabNo ratings yet
- Software Design Theory and Railroad Application of Simple Drapery SystemDocument14 pagesSoftware Design Theory and Railroad Application of Simple Drapery SystemoscargilgNo ratings yet
- V Notch PracticalDocument13 pagesV Notch PracticalAnushaBheenuck0% (2)
- Ubc 2011 Fall Vakili SoheylDocument193 pagesUbc 2011 Fall Vakili Soheyl조기현No ratings yet