You might also like
- Multidimensional Systems: Signal Processing and Modeling Techniques: Advances in Theory and ApplicationsFrom EverandMultidimensional Systems: Signal Processing and Modeling Techniques: Advances in Theory and ApplicationsNo ratings yet
- Modeling and Control of Power Electronics Converter System for Power Quality ImprovementsFrom EverandModeling and Control of Power Electronics Converter System for Power Quality ImprovementsRating: 5 out of 5 stars5/5 (1)
- PHD Tech ResumeDocument6 pagesPHD Tech ResumeShantanu ShuklaNo ratings yet
- Sample ResumeDocument17 pagesSample ResumeharshabidNo ratings yet
- Praveen Meduri ResumeDocument5 pagesPraveen Meduri ResumePraveen MeduriNo ratings yet
- M.SC - in Electrical and Comp Control EngDocument36 pagesM.SC - in Electrical and Comp Control EngIslam FattouhNo ratings yet
- Alavudeen & VenkateshwaranDocument4 pagesAlavudeen & Venkateshwaransantoshk_itbhuvNo ratings yet
- Kkbil4-2010 Lampiran A Kertas Kerja Sistem KawalanDocument3 pagesKkbil4-2010 Lampiran A Kertas Kerja Sistem KawalanHairul Effendy Ab MaulodNo ratings yet
- Mithun Singla Resume EE PHDDocument2 pagesMithun Singla Resume EE PHDMithun SinglaNo ratings yet
- Resume HassanDocument16 pagesResume HassanTanveerNo ratings yet
- 260 N. Mathilda Ave #N7 Sunnyvale CA 94086: Tat Kee TanDocument2 pages260 N. Mathilda Ave #N7 Sunnyvale CA 94086: Tat Kee TanSiddharthSharmaNo ratings yet
- Workshop Speakers Bio Datav2Document6 pagesWorkshop Speakers Bio Datav2dkaushiksondurNo ratings yet
- Abhaya PHDDocument4 pagesAbhaya PHDAbhayaNo ratings yet
- Vishwani D. Agrawal: Career ObjectiveDocument34 pagesVishwani D. Agrawal: Career ObjectiveArman AliNo ratings yet
- CV Kai Wu Oct 19thDocument1 pageCV Kai Wu Oct 19thapi-182175268No ratings yet
- DatsheetDocument3 pagesDatsheetManojGRamakrishnaNo ratings yet
- M.E. SyllabusDocument13 pagesM.E. Syllabusகோகுல்நாத் ஸ்ரீ கிNo ratings yet
- Ryan Steger CV ResumeDocument4 pagesRyan Steger CV ResumeMallikarjun TalwarNo ratings yet
- Anurag Kumar CVDocument22 pagesAnurag Kumar CVSv NikhilNo ratings yet
- Resume Fulltime AnandDocument2 pagesResume Fulltime Anandomidali59No ratings yet
- Taylor T. Johnson: EducationDocument7 pagesTaylor T. Johnson: EducationdewufhweuihNo ratings yet
- SDMCET - ECE - S. V. ViraktamathDocument14 pagesSDMCET - ECE - S. V. ViraktamathManjunath YadavNo ratings yet
- Vita Kishor S TrivediDocument51 pagesVita Kishor S TrivediGurjar DevyaniNo ratings yet
- ResumeDocument3 pagesResumeGanesan ThangasamyNo ratings yet
- Applied Electronics 05 Ec 64xxDocument60 pagesApplied Electronics 05 Ec 64xxwhiteelephant93No ratings yet
- Control Engineering - CourseDocument6 pagesControl Engineering - CourseJay ParkheNo ratings yet
- CV: Adnan AzizDocument14 pagesCV: Adnan Azizramashankar1hNo ratings yet
- Vtu PHD Coursework Syllabus MechanicalDocument5 pagesVtu PHD Coursework Syllabus Mechanicalafaocsazx100% (2)
- D 5006Document2 pagesD 5006Sudhanshu BadolaNo ratings yet
- RWilliams CVDocument3 pagesRWilliams CVMallikarjun TalwarNo ratings yet
- Course Outline PDFDocument5 pagesCourse Outline PDFbukhariNo ratings yet
- Signals and Systems Course PlanDocument6 pagesSignals and Systems Course Planaarthi.lj5371No ratings yet
- IISc Bangalore Course WorkDocument12 pagesIISc Bangalore Course WorkPowerranger2.0No ratings yet
- Electrical & Systems Engineering (EG) (ESE) : Page 1 of 21Document21 pagesElectrical & Systems Engineering (EG) (ESE) : Page 1 of 21burndtjamb2000No ratings yet
- Control SystemDocument23 pagesControl SystemSudip BanikNo ratings yet
- Thesis System EngineeringDocument6 pagesThesis System Engineeringjillturnercincinnati100% (2)
- IEEE Transient Analisis of Power Systems - Solution Technics, Tools and Aplications PDFDocument257 pagesIEEE Transient Analisis of Power Systems - Solution Technics, Tools and Aplications PDFrogeriojuruaia100% (2)
- Course File - WSNDocument20 pagesCourse File - WSNajaychhotu100% (1)
- Vamsi Krishna Patwari: ObjectiveDocument2 pagesVamsi Krishna Patwari: ObjectiveVamsi PatwariNo ratings yet
- Ic6501 - CS 2 Marks With AnswersDocument41 pagesIc6501 - CS 2 Marks With Answersmarrgaretvijay50% (2)
- Introduction Power Systems 08 ADocument161 pagesIntroduction Power Systems 08 Abaosyle9201No ratings yet
- M.tech (Controle & Instrumentation) Syllabus N.S.E.CDocument19 pagesM.tech (Controle & Instrumentation) Syllabus N.S.E.CAlluri Appa RaoNo ratings yet
- SMART Power Flow Controllers - A Necessity For Future Power GridDocument2 pagesSMART Power Flow Controllers - A Necessity For Future Power GridBT21EE013 PratimaNo ratings yet
- Research Profile 2019 PDFDocument7 pagesResearch Profile 2019 PDFMd. Ashikur RahmanNo ratings yet
- Hafiz Muhammad Nabeel: Career ObjectiveDocument5 pagesHafiz Muhammad Nabeel: Career ObjectiveMuhammad Zaka Ud DinNo ratings yet
- References: Received 23 July 2013 Revised 21 March 2014Document1 pageReferences: Received 23 July 2013 Revised 21 March 2014ab__ismNo ratings yet
- References: Received 23 July 2013 Revised 21 March 2014Document1 pageReferences: Received 23 July 2013 Revised 21 March 2014ab__ismNo ratings yet
- Zhong Smart GridDocument3 pagesZhong Smart GridmmrNo ratings yet
- Modeling and Control of AntennasDocument235 pagesModeling and Control of AntennasDaniel Flores CórdovaNo ratings yet
- EE6511Document1 pageEE6511suprobhatNo ratings yet
- Idria A Rai CVDocument5 pagesIdria A Rai CVnamidrisNo ratings yet
- ChangLiu General CFDDocument2 pagesChangLiu General CFDprakash_vinayak4946No ratings yet
- Anna University Tirunelveli: Tirunelveli 627 007: Affiliated Institutions Regulations - 2008Document72 pagesAnna University Tirunelveli: Tirunelveli 627 007: Affiliated Institutions Regulations - 2008nithyaram24No ratings yet
- A Review On Protective Relays' Developments and Trends: ReferencesDocument1 pageA Review On Protective Relays' Developments and Trends: Referencesab__ismNo ratings yet
- M.Tech Syllabus For Embedded Systems at NIT Jaipur.Document25 pagesM.Tech Syllabus For Embedded Systems at NIT Jaipur.Ishank Dubey100% (1)
- CVDocument5 pagesCVTajwar HoqueNo ratings yet
- Syl Lab I MechanicalDocument231 pagesSyl Lab I MechanicalSachin SilmanaNo ratings yet
- Vtu Thesis UploadDocument5 pagesVtu Thesis UploadBestCollegePaperWritingServiceSingapore100% (3)
- Lithography or Lithography Process Engineer or Electron Beam LitDocument3 pagesLithography or Lithography Process Engineer or Electron Beam Litapi-121369385No ratings yet
- III RD YEAR SEM B U.G. Elex and TC Syllabus 2022-23Document11 pagesIII RD YEAR SEM B U.G. Elex and TC Syllabus 2022-23mishranitesh25072004No ratings yet
- OFF-LINE Registration Form: 3 International Conference On Microwave and Photonics (ICMAP) - 2018Document1 pageOFF-LINE Registration Form: 3 International Conference On Microwave and Photonics (ICMAP) - 2018avi0341No ratings yet
- Cryptographic Hash FunctionsDocument55 pagesCryptographic Hash Functionsavi0341No ratings yet
- At The Time of Admission or Latest by September 15, 2016Document1 pageAt The Time of Admission or Latest by September 15, 2016avi0341No ratings yet
- Notice M.tech. (MKM)Document1 pageNotice M.tech. (MKM)avi0341No ratings yet
- Studies On Cryptosystem by Applying Chaos: Avishek KumarDocument1 pageStudies On Cryptosystem by Applying Chaos: Avishek Kumaravi0341No ratings yet
- Hash Functions: A Gentle Introduction: Palash SarkarDocument74 pagesHash Functions: A Gentle Introduction: Palash Sarkaravi0341No ratings yet
- Role of Wickability On The Critical Heat Flux of Structured Superhydrophilic SurfacesDocument10 pagesRole of Wickability On The Critical Heat Flux of Structured Superhydrophilic Surfacesavi0341No ratings yet
- Compressive Optical Image Encryption: Jun Li, Jiao Sheng Li, Yang Yang Pan & Rong LiDocument10 pagesCompressive Optical Image Encryption: Jun Li, Jiao Sheng Li, Yang Yang Pan & Rong Liavi0341No ratings yet
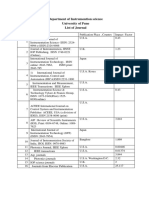
- Department of Instrumention Science University of Pune List of JournalDocument2 pagesDepartment of Instrumention Science University of Pune List of Journalavi0341No ratings yet
- Shift-Tolerance Property of An Optical Double-Random Phase-Encoding Encryption SystemDocument7 pagesShift-Tolerance Property of An Optical Double-Random Phase-Encoding Encryption Systemavi0341No ratings yet
- An Introduction To Cryptography and Digital Signatures: Author: Ian Curry March 2001Document6 pagesAn Introduction To Cryptography and Digital Signatures: Author: Ian Curry March 2001avi0341No ratings yet
- Energies: Battery Management Systems in Electric and Hybrid VehiclesDocument18 pagesEnergies: Battery Management Systems in Electric and Hybrid Vehiclesavi0341No ratings yet
- El Gamal PDFDocument2 pagesEl Gamal PDFavi0341No ratings yet
- Motivation: 100584R - W.A.H.R.WeerathungeDocument2 pagesMotivation: 100584R - W.A.H.R.Weerathungeavi0341No ratings yet
- Rotary Club of Asansol: 3240 R I DistrictDocument4 pagesRotary Club of Asansol: 3240 R I Districtavi0341No ratings yet
- HTCH QR$ S (F-/E-Mail: QffiffirDocument2 pagesHTCH QR$ S (F-/E-Mail: Qffiffiravi0341No ratings yet
- Hindi Poems and Motivation PDFDocument6 pagesHindi Poems and Motivation PDFavi0341No ratings yet
- MidSem 2016Document2 pagesMidSem 2016avi0341No ratings yet
- Death Related EncountersDocument4 pagesDeath Related Encountersavi034167% (3)
- ReadMe PDFDocument2 pagesReadMe PDFavi0341No ratings yet
- Keckley Float ValvesDocument15 pagesKeckley Float ValvesWagner LimaNo ratings yet
- Lecture - 09 - Dimensional Analysis and SimilitudeDocument11 pagesLecture - 09 - Dimensional Analysis and SimilitudeHizana D.SNo ratings yet
- Chapter 2 Stress and Strain: Fig. 2.1 External and Internal Forces in A Structural MemberDocument14 pagesChapter 2 Stress and Strain: Fig. 2.1 External and Internal Forces in A Structural MemberMatthew LinNo ratings yet
- Simpson Fence Base and BracketDocument3 pagesSimpson Fence Base and BracketAloNo ratings yet
- Brakes Hawker 789 MTM FlightSafetyDocument21 pagesBrakes Hawker 789 MTM FlightSafetyAQS Centro capacitacion aereaNo ratings yet
- Thermodynamics: AllenDocument9 pagesThermodynamics: AllenronakNo ratings yet
- Rycroft HT BreezeDocument16 pagesRycroft HT BreezesatejNo ratings yet
- Statically Indeterminate BeamsDocument7 pagesStatically Indeterminate BeamsMary Jane PelaezNo ratings yet
- RST 2010 CatalogDocument90 pagesRST 2010 CatalogGoodBikesNo ratings yet
- Constitutive Equation and Normalized Carpet Plots of Symmetrical Fiber Reinforced LaminatesDocument90 pagesConstitutive Equation and Normalized Carpet Plots of Symmetrical Fiber Reinforced LaminatesjoereisNo ratings yet
- Instruction Manual ControltromikDocument10 pagesInstruction Manual ControltromikVoştinar IoanNo ratings yet
- Propeller Shaft: Models FA and FBDocument15 pagesPropeller Shaft: Models FA and FBKomatsu Perkins HitachiNo ratings yet
- Theory of Plates Mechanic of MaterialDocument25 pagesTheory of Plates Mechanic of MaterialisafeeneyNo ratings yet
- 2p36907 SwivelDocument42 pages2p36907 SwivelIFI ARGENTINA S.A.No ratings yet
- Djj10022 Fitting ReportDocument7 pagesDjj10022 Fitting ReportTamil passang songNo ratings yet
- Mi 9664 TDocument5 pagesMi 9664 Tamir barekatiNo ratings yet
- Slapdriver Interference Screwdriver SystemDocument8 pagesSlapdriver Interference Screwdriver SystemFreddy Churata SuriNo ratings yet
- Manual Msi3 A4 en ScreenDocument8 pagesManual Msi3 A4 en ScreenVladNo ratings yet
- Building Utilities Reviewer ComprehensiveDocument3 pagesBuilding Utilities Reviewer ComprehensiveReynald HarrisNo ratings yet
- TacheuchiTB1140 S51400007 - ServiceDocument652 pagesTacheuchiTB1140 S51400007 - ServiceStelian CrisanNo ratings yet
- Revised Cleaning and Painting Piece Rate Data 02-07-2021Document5 pagesRevised Cleaning and Painting Piece Rate Data 02-07-2021Corrosion FactoryNo ratings yet
- Helicoil GB 0180Document40 pagesHelicoil GB 0180MamdouhAlhanafyNo ratings yet
- F5ae9484 9454 AgricolaDocument150 pagesF5ae9484 9454 Agricolajvega_534120No ratings yet
- Power Plant QuestionsDocument20 pagesPower Plant QuestionsSubhransu Mohapatra50% (2)
- 2.0 MZR-CD Engine Lubrication SystemDocument20 pages2.0 MZR-CD Engine Lubrication SystemPablo De Miguel GonzálezNo ratings yet
- Line Sizing Spreadsheets-GeneralDocument8 pagesLine Sizing Spreadsheets-GeneralFavoriteNo ratings yet
- Mecanica MotoareDocument45 pagesMecanica MotoareAutogrederNo ratings yet
- EN 288-3xDocument38 pagesEN 288-3xSyah Reza Maulana0% (1)
- Offshore Pipe Line Design State of The ArtDocument33 pagesOffshore Pipe Line Design State of The ArtMvrnaidu MithraNo ratings yet
- CHE 303 - Chemical Engineering Thermodynamics II / All Sections First Semester 2011 - 2012Document2 pagesCHE 303 - Chemical Engineering Thermodynamics II / All Sections First Semester 2011 - 2012ArielNo ratings yet