You might also like
- Glass PanelDocument2 pagesGlass PanelEIWAA50% (2)
- Appendix D Review of Mechanics of Materials - 2009 - Elasticity Second Edition PDFDocument14 pagesAppendix D Review of Mechanics of Materials - 2009 - Elasticity Second Edition PDFJaimeNo ratings yet
- MEC2213 - Shearing Force IDocument26 pagesMEC2213 - Shearing Force IAlex Chee100% (2)
- End Plate Design As Per-Ec3Document18 pagesEnd Plate Design As Per-Ec36j7100% (1)
- TorsionDocument16 pagesTorsionhamalNo ratings yet
- Torsion of Circular ShaftsDocument26 pagesTorsion of Circular ShaftsNaveen Kumar0% (1)
- Notes TorsionDocument15 pagesNotes TorsionblehsadnjsNo ratings yet
- Strain GaugeDocument2 pagesStrain Gaugekamikaze0900No ratings yet
- CH6 PDFDocument45 pagesCH6 PDFAguero AgueroNo ratings yet
- CH 06Document48 pagesCH 06LeonardoMadeira11No ratings yet
- Lecture 3Document30 pagesLecture 3M.HNo ratings yet
- Capitulo 6 - Torsion en Ejes Prismaticos PDFDocument42 pagesCapitulo 6 - Torsion en Ejes Prismaticos PDFCristian David BravoNo ratings yet
- Stress Analysis in Elastic Bending Beams and Thick Hollow CylindersDocument6 pagesStress Analysis in Elastic Bending Beams and Thick Hollow Cylindersمحمد فطري فيك نظامNo ratings yet
- Shear Center LabDocument9 pagesShear Center LabJulianSamayoaNo ratings yet
- Chapter III - TorsionDocument19 pagesChapter III - TorsionMostafa Essam Ezzat MahmoudNo ratings yet
- Chapter 2 STR 4 Torsion in BeamsDocument17 pagesChapter 2 STR 4 Torsion in BeamsAbera MamoNo ratings yet
- Torsion of Circular Sections: Recitation #6 October 14, 2003Document12 pagesTorsion of Circular Sections: Recitation #6 October 14, 2003Krm ChariNo ratings yet
- Use of Flexure Formula:: Illustrative ProblemsDocument6 pagesUse of Flexure Formula:: Illustrative ProblemsKaiser CarloNo ratings yet
- TorsionDocument11 pagesTorsionayubNo ratings yet
- Lecture 1 - Stress-Strain RelationshipDocument26 pagesLecture 1 - Stress-Strain RelationshipSri JaiandranNo ratings yet
- Torsion of Shafts: Chapter FiveDocument0 pagesTorsion of Shafts: Chapter FiveJavier_MoliNo ratings yet
- Beam TorsionDocument48 pagesBeam TorsionKory EstesNo ratings yet
- Torsion in Closed SectionsDocument11 pagesTorsion in Closed SectionsJason GarnerNo ratings yet
- Chapter 3 (Torsion)Document12 pagesChapter 3 (Torsion)znabu asefaNo ratings yet
- Bending, Torsion, and StressDocument18 pagesBending, Torsion, and StressnasirfahimNo ratings yet
- Members Subjected To Torsional LoadsDocument8 pagesMembers Subjected To Torsional LoadsRahulkumarchauhanNo ratings yet
- Chapter 3 StressDocument145 pagesChapter 3 Stressataberk-ozkayaNo ratings yet
- Cie 525Document12 pagesCie 525Richard PadillaNo ratings yet
- Wongyeec 1969Document75 pagesWongyeec 1969ReemALMousawiNo ratings yet
- Beam Design Lecture NotesDocument24 pagesBeam Design Lecture Notesyyanan1118No ratings yet
- Design of ShaftsDocument5 pagesDesign of ShaftsDamianNo ratings yet
- Torsion of Noncircular Prismatic Bars - Extract From Craig Mechanics of MaterialsDocument5 pagesTorsion of Noncircular Prismatic Bars - Extract From Craig Mechanics of MaterialsAlmudena9No ratings yet
- Design of Circular Base Plate Under Large Bending MomentDocument5 pagesDesign of Circular Base Plate Under Large Bending MomentAntonioMonteroNo ratings yet
- PPT-SF BM 1Document68 pagesPPT-SF BM 1Sudhir PatelNo ratings yet
- MOR and Modes of Failure of BeamsDocument9 pagesMOR and Modes of Failure of Beamsward dhapakhelNo ratings yet
- Shear Force and Shear StressDocument3 pagesShear Force and Shear StressAGEGTAMNo ratings yet
- Copy Slides Test 2Document60 pagesCopy Slides Test 2fatin_musaNo ratings yet
- Torsion 6th ChapterDocument13 pagesTorsion 6th ChapterakshatbhargavaNo ratings yet
- Arm301 QBDocument6 pagesArm301 QBKunal KhandelwalNo ratings yet
- CIV6235 - Shear (MG)Document26 pagesCIV6235 - Shear (MG)friendycalls100% (1)
- Mechanics of Materials (ME-294) : TorsionDocument39 pagesMechanics of Materials (ME-294) : TorsionMuhammad UsmanNo ratings yet
- Som 200323142910Document9 pagesSom 200323142910Asante MandioperaNo ratings yet
- TorsionDocument49 pagesTorsioner.jaspreetNo ratings yet
- TorsionDocument49 pagesTorsionBandula PrasadNo ratings yet
- CH 07Document9 pagesCH 07samaptapwNo ratings yet
- Chapter 4 Shear and Moment in BeamsDocument42 pagesChapter 4 Shear and Moment in Beamssaleemm_2No ratings yet
- 1 Viga ColunaDocument27 pages1 Viga ColunaFrank JohnNo ratings yet
- 5.transverse ShearDocument15 pages5.transverse ShearEden HazardNo ratings yet
- force (that is, the force per unit area) is called the stress and is commonly denoted by the Greek letter σ (Sigma)Document11 pagesforce (that is, the force per unit area) is called the stress and is commonly denoted by the Greek letter σ (Sigma)Tolera GutuNo ratings yet
- TorsionDocument8 pagesTorsionZewdieNo ratings yet
- Basic Concepts, Rectangular and T Beams PDFDocument49 pagesBasic Concepts, Rectangular and T Beams PDFAhmed Hussein KamelNo ratings yet
- Torsion Tension and Column (11-16)Document33 pagesTorsion Tension and Column (11-16)2011kumarNo ratings yet
- Beams: Diagrams and Formulas For Various Loading ConditionsDocument34 pagesBeams: Diagrams and Formulas For Various Loading ConditionsgaganNo ratings yet
- B. Tech. 1 Year (Civil) Solid Mechanics (CEN-102) Tutorial Sheet 4: Torsion, Shear Force and Bending MomentDocument4 pagesB. Tech. 1 Year (Civil) Solid Mechanics (CEN-102) Tutorial Sheet 4: Torsion, Shear Force and Bending MomentKumar ShivamNo ratings yet
- Curved Prestressed BeamDocument5 pagesCurved Prestressed Beama96lhfNo ratings yet
- Materi 4Document18 pagesMateri 4Adiel WusqaNo ratings yet
- Beams and Framed Structures: Structures and Solid Body MechanicsFrom EverandBeams and Framed Structures: Structures and Solid Body MechanicsRating: 3 out of 5 stars3/5 (2)
- AhahahwDocument1 pageAhahahwabouelrich188No ratings yet
- Problem Codes Failure Codes Cause CodeDocument2 pagesProblem Codes Failure Codes Cause Codeabouelrich188No ratings yet
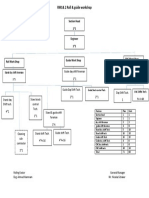
- RM1& 2 Roll & Guide Workshop: Section Head 1 1 Engineer 1 1Document1 pageRM1& 2 Roll & Guide Workshop: Section Head 1 1 Engineer 1 1abouelrich188No ratings yet
- Section Head 1 1: Forklift Driver Foreman 1 1 Crane Operator Foreman 1 1Document2 pagesSection Head 1 1: Forklift Driver Foreman 1 1 Crane Operator Foreman 1 1abouelrich188No ratings yet
- Hydraulic and Pneumatic System SchematicsDocument10 pagesHydraulic and Pneumatic System Schematicsabouelrich188No ratings yet
- Topic 2 Column Buckling: Q DX W D N DX W D EIDocument7 pagesTopic 2 Column Buckling: Q DX W D N DX W D EIabouelrich188No ratings yet
- S2-1 Beam-14Document12 pagesS2-1 Beam-14abouelrich188No ratings yet
- Lesson 1 - Intro To Thermo - Student-3Document3 pagesLesson 1 - Intro To Thermo - Student-3OreoDaChickenPlayz YTNo ratings yet
- Revised Atomic StructureDocument43 pagesRevised Atomic StructureUdy MaudyNo ratings yet
- Module 1Document82 pagesModule 1ALL TIME STUDYNo ratings yet
- Ch27 Gauss Law Phy1020 s16 BBFDocument8 pagesCh27 Gauss Law Phy1020 s16 BBFMichael CatsburgerNo ratings yet
- Definition of Head and Its Units - Kinetic Head - Potential Head - Pressure Head - Total Head - Civil Engineering TermsDocument1 pageDefinition of Head and Its Units - Kinetic Head - Potential Head - Pressure Head - Total Head - Civil Engineering TermsMalik Hamid50% (2)
- Moment of InertiaDocument12 pagesMoment of InertiaVivo 1906No ratings yet
- Tutorial ElectrostaticsDocument1 pageTutorial ElectrostaticsRavi NasitNo ratings yet
- ISS Motion Control SystemDocument3 pagesISS Motion Control Systemzmei23No ratings yet
- ABAQUS User SubroutineDocument18 pagesABAQUS User Subroutineknan1100% (1)
- Steel Problem Set FinalDocument27 pagesSteel Problem Set FinalJupissa EspinosaNo ratings yet
- Emd ImpDocument7 pagesEmd ImpErAmolDhakaneNo ratings yet
- Root-Mean-Square Speed (RMS Speed)Document10 pagesRoot-Mean-Square Speed (RMS Speed)MD Al Fahad NirobNo ratings yet
- Copy Slides Test 2Document60 pagesCopy Slides Test 2fatin_musaNo ratings yet
- Komitmen Wujudkan Green MiningDocument14 pagesKomitmen Wujudkan Green MiningAgustina Elfira RidhaNo ratings yet
- Quick Revision Course of FM For Uppsc - Ae (In Unacademy Free Special Classes) Byjsgill Everyday 8:00 AM To 9:00 AM Starting From 3 October OnwardsDocument2 pagesQuick Revision Course of FM For Uppsc - Ae (In Unacademy Free Special Classes) Byjsgill Everyday 8:00 AM To 9:00 AM Starting From 3 October OnwardsRajput Snehi SinghNo ratings yet
- LO2 Structural Mechanical Prop Metals PDFDocument41 pagesLO2 Structural Mechanical Prop Metals PDFChelle VillasisNo ratings yet
- Roof Beam DesignDocument68 pagesRoof Beam DesignUlasi IfeanyiNo ratings yet
- Physicess IX)Document3 pagesPhysicess IX)pullaiNo ratings yet
- Lecture Notes On Classical Mechanics (PDFDrive)Document463 pagesLecture Notes On Classical Mechanics (PDFDrive)William CruzNo ratings yet
- Tesla's Dynamic Theory of GravityDocument16 pagesTesla's Dynamic Theory of Gravitygiovacane100% (1)
- Transmission Hydraulic SystemDocument4 pagesTransmission Hydraulic SystemA Ramos Gaby100% (4)
- Wind Load Reaction Force Due To Wind Action From Stack Acting On The Fan DeckDocument3 pagesWind Load Reaction Force Due To Wind Action From Stack Acting On The Fan Deckikanyu79No ratings yet
- Sheet 01 20-21 Properties of Fluid RevDocument2 pagesSheet 01 20-21 Properties of Fluid RevBibaswan MukherjeeNo ratings yet
- Needle Roller BearingsDocument11 pagesNeedle Roller BearingsReyben RubioNo ratings yet
- Forms of Energy (Tutorial Part 2)Document3 pagesForms of Energy (Tutorial Part 2)asapamore100% (1)
- SI 4121 Pengantar Dinamika Tanah Dan Rekayasa Gempa#4 Modeling Soil Response During Shear CyclesDocument84 pagesSI 4121 Pengantar Dinamika Tanah Dan Rekayasa Gempa#4 Modeling Soil Response During Shear CyclesChristopher GilbertNo ratings yet
- Power Transfer: 2.2 Velocity Ratio, Belt Tension 2.1 Belt Drive SystemDocument25 pagesPower Transfer: 2.2 Velocity Ratio, Belt Tension 2.1 Belt Drive SystemHamizan AzliNo ratings yet
- Assignment Physics 01 012022Document2 pagesAssignment Physics 01 012022Trương Đức HiếuNo ratings yet