You might also like
- The C3 Mini Lathe IDocument3 pagesThe C3 Mini Lathe IAnonymous mKdAfWifNo ratings yet
- QcadCAM Tutorial enDocument12 pagesQcadCAM Tutorial enartisanicviewNo ratings yet
- Screwcutting Lathe Workshop Practice Series 0852428383 BookDocument4 pagesScrewcutting Lathe Workshop Practice Series 0852428383 BookrefaeNo ratings yet
- Analog Parts Kit - DigilentDocument6 pagesAnalog Parts Kit - DigilentMario AcostaNo ratings yet
- Measuring tools and techniques in metalworkingDocument2 pagesMeasuring tools and techniques in metalworkingInstruktur MesinNo ratings yet
- WErbsen CourseworkDocument562 pagesWErbsen CourseworkRoberto Alexis Rodríguez TorresNo ratings yet
- Triton-Powered Saw TableDocument32 pagesTriton-Powered Saw Tableauger88No ratings yet
- 71-77 Dies AccessoriesDocument7 pages71-77 Dies Accessoriesradio-chaserNo ratings yet
- 3 PhaseDocument9 pages3 PhaseArnulfo LavaresNo ratings yet
- PowerTIG 250EX 2016Document32 pagesPowerTIG 250EX 2016Bob john100% (1)
- Operating: Maintenance ManualDocument18 pagesOperating: Maintenance ManualAnonymous reYe6iCCNo ratings yet
- South Bend 9" Compound Slide Screw Fabrication For A Large Dial/Thrust Bearing Conversion by Ed Godwin 8 December, 2007Document16 pagesSouth Bend 9" Compound Slide Screw Fabrication For A Large Dial/Thrust Bearing Conversion by Ed Godwin 8 December, 2007asdfNo ratings yet
- The Art of Centered Eye BendingDocument29 pagesThe Art of Centered Eye BendingKhin Aung Shwe100% (1)
- Lathe ToolslideDocument2 pagesLathe ToolslideFrenchwolf420No ratings yet
- AVHC Quick StartDocument58 pagesAVHC Quick StartAndres Jose Amato TorresNo ratings yet
- Cold Setting The Valves On A 1953 Dodge M37 Power WagonDocument2 pagesCold Setting The Valves On A 1953 Dodge M37 Power Wagoncriag100% (1)
- Tricking Out Asian 9x20 LatheDocument48 pagesTricking Out Asian 9x20 Lathearanicki8587No ratings yet
- A Grinding SpindleDocument4 pagesA Grinding Spindlewillows300No ratings yet
- 47158Document16 pages47158Rosania SanchesNo ratings yet
- Cylinder Kreidler TuningDocument6 pagesCylinder Kreidler Tuningfzr67100% (1)
- Pedal Power in Work Leisure and TransportationDocument143 pagesPedal Power in Work Leisure and Transportationtariq76No ratings yet
- Home Workshop Milling Machine GuideDocument31 pagesHome Workshop Milling Machine Guidetaiwest100% (1)
- Unit-2 - 03 Aug 2015Document98 pagesUnit-2 - 03 Aug 2015Prasad AurangabadkarNo ratings yet
- 091 Choosing Metal Drawer Slides PDFDocument4 pages091 Choosing Metal Drawer Slides PDFHomerSimsonnakisNo ratings yet
- Measuring and Correcting Bump Steer On A Caterham 7Document8 pagesMeasuring and Correcting Bump Steer On A Caterham 7damdy-cashNo ratings yet
- Planer Quick Return MechanismDocument21 pagesPlaner Quick Return Mechanismlalagandu100% (1)
- LeBlond Regal Lathes Manuals AvailableDocument60 pagesLeBlond Regal Lathes Manuals Availablejulie2420140% (1)
- Modification and Development of Work Holding Device - Steady-RestDocument6 pagesModification and Development of Work Holding Device - Steady-RestInternational Journal of Innovative Science and Research Technology100% (1)
- Setup and Installation of JDSW51A 5-Axis USB Motion CardDocument36 pagesSetup and Installation of JDSW51A 5-Axis USB Motion Cardabelmil123No ratings yet
- Mini Lathe Angular Contact Bearing Change GuideDocument5 pagesMini Lathe Angular Contact Bearing Change GuidemallardfirstNo ratings yet
- Atlas Mill AccessoriesDocument1 pageAtlas Mill AccessoriesGary RepeshNo ratings yet
- KeycutterDocument3 pagesKeycutterFrenchwolf420No ratings yet
- Bemato Dividing Head ManualDocument12 pagesBemato Dividing Head ManualDwijo Suwito DwiNo ratings yet
- GX 340 horizontal shaft gasoline engine specificationsDocument4 pagesGX 340 horizontal shaft gasoline engine specificationsmichaelmangaaNo ratings yet
- The Taig Peatol Lathe and Its AccessoriesDocument264 pagesThe Taig Peatol Lathe and Its Accessories史李飞No ratings yet
- Rebuild and Relocate a Vintage Bridgeport MillDocument15 pagesRebuild and Relocate a Vintage Bridgeport Millwolviak100% (1)
- Using A Rotary TableDocument21 pagesUsing A Rotary TableMaries MarcelNo ratings yet
- Mill Keyways On LatheDocument1 pageMill Keyways On LatheJim100% (3)
- Urn NBN Si Img-0mzhjfcfDocument4 pagesUrn NBN Si Img-0mzhjfcfsloba605No ratings yet
- Table Saw AlingmentDocument8 pagesTable Saw AlingmentEd BozmanNo ratings yet
- CNC IselautomationDocument360 pagesCNC Iselautomationkavadarci14100% (2)
- Lathes and Lathe Machining OperationsDocument11 pagesLathes and Lathe Machining OperationsJunayed HasanNo ratings yet
- Accu-Finish II ManualDocument8 pagesAccu-Finish II ManualOliver CollectorNo ratings yet
- Workshop Practice Series 06 Measuring and Marking MetalsDocument56 pagesWorkshop Practice Series 06 Measuring and Marking MetalsJHANGIR KHANNo ratings yet
- Electrolysis Cleaning MethodDocument15 pagesElectrolysis Cleaning Methodtrillium_oneNo ratings yet
- Lathe Chuck Backplate FittingDocument2 pagesLathe Chuck Backplate FittingAnonymous iYKTkmhpZ100% (3)
- 1936 - How To Cut Screw Threads in The Lathe - Bulletin 36ADocument24 pages1936 - How To Cut Screw Threads in The Lathe - Bulletin 36AJason Bowman100% (1)
- Lathe Parts: - Being A Brief Description of The Names and Functions of PartsDocument7 pagesLathe Parts: - Being A Brief Description of The Names and Functions of PartsDipanjana Bhowmik100% (1)
- A Small Bench Lathe Made of PipeDocument2 pagesA Small Bench Lathe Made of PipeCicero Milan100% (3)
- Construction and Manufacture of AutomobilesFrom EverandConstruction and Manufacture of AutomobilesRating: 5 out of 5 stars5/5 (1)
- Farm Engines and How to Run Them The Young Engineer's GuideFrom EverandFarm Engines and How to Run Them The Young Engineer's GuideNo ratings yet
- Bmen3120 Project1 Frequency Selective Circuit 1Document12 pagesBmen3120 Project1 Frequency Selective Circuit 1api-3139933760% (2)
- Lab 09 Band Pass and Band Stop Filter DesignDocument8 pagesLab 09 Band Pass and Band Stop Filter DesignfarhanNo ratings yet
- High Order Programmable and Tunable Analog Filter ICDocument16 pagesHigh Order Programmable and Tunable Analog Filter ICRahil JainNo ratings yet
- 04-RF Electronics Kikkert Ch2 SimulationDocument17 pages04-RF Electronics Kikkert Ch2 SimulationSreejith JayachandranNo ratings yet
- Lab 08 Filter DesignDocument8 pagesLab 08 Filter DesignfarhanNo ratings yet
- Lab Report - ECEDocument16 pagesLab Report - ECEasm9809No ratings yet
- Lab 09 Band Pass and Band Stop Filter DesignDocument8 pagesLab 09 Band Pass and Band Stop Filter DesignfarhanNo ratings yet
- DamsDocument38 pagesDamsmadangkNo ratings yet
- Methodology For Prevention and Repair of Cracks in BuildingDocument7 pagesMethodology For Prevention and Repair of Cracks in BuildingGRD JournalsNo ratings yet
- ML12153A412 Fisuras PDFDocument62 pagesML12153A412 Fisuras PDFJuan Gutier CcNo ratings yet
- Mystery of Gemstone PolishDocument11 pagesMystery of Gemstone PolishmadangkNo ratings yet
- Advances and Processes in Precision Glass Polishing Technique1Document12 pagesAdvances and Processes in Precision Glass Polishing Technique1madangkNo ratings yet
- Review of Literature On Natural DyesDocument51 pagesReview of Literature On Natural Dyesmadangk100% (4)
- Quantity of Cement, Sand & Aggregate in 1m3 ConcreteDocument7 pagesQuantity of Cement, Sand & Aggregate in 1m3 ConcretemadangkNo ratings yet
- Lecture 5 Steelmaking Fundamentals PDFDocument5 pagesLecture 5 Steelmaking Fundamentals PDFsukandeNo ratings yet
- Benelite Process For Upgradation of IllemniteDocument6 pagesBenelite Process For Upgradation of Illemnitemadangk100% (1)
- United States: (12) Patent Application Publication (10) Pub. No.: US 2003/0074052 A1Document26 pagesUnited States: (12) Patent Application Publication (10) Pub. No.: US 2003/0074052 A1madangkNo ratings yet
- The Technique of Glass Making in India (1400.1800 Aid.)Document14 pagesThe Technique of Glass Making in India (1400.1800 Aid.)madangkNo ratings yet
- Some Aspects of Glass Manufacturing in Ancient IndiaDocument28 pagesSome Aspects of Glass Manufacturing in Ancient IndiamadangkNo ratings yet
- Microstructural Design of Toughened CeramicsDocument15 pagesMicrostructural Design of Toughened CeramicsmadangkNo ratings yet
- Digital Circuit Projects An Overview of Digital Circuits Through Implementing Integrated CircuitsDocument96 pagesDigital Circuit Projects An Overview of Digital Circuits Through Implementing Integrated CircuitsmadangkNo ratings yet
- Scientific Study of Indian Glass: Past and Future TrendsDocument15 pagesScientific Study of Indian Glass: Past and Future TrendsmadangkNo ratings yet
- Chalcogenide Glasses Review Applications Electronics OptoelectronicsDocument0 pagesChalcogenide Glasses Review Applications Electronics OptoelectronicsmadangkNo ratings yet
- Glass Beads in Ancient India and Furnace - Wound Beads at Purdalpur An Ethnoarchaeological ApproachDocument28 pagesGlass Beads in Ancient India and Furnace - Wound Beads at Purdalpur An Ethnoarchaeological ApproachmadangkNo ratings yet
- Metamagnetic Shape Memory Effect in NiMnbased Heusler-Type AlloysDocument7 pagesMetamagnetic Shape Memory Effect in NiMnbased Heusler-Type AlloysmadangkNo ratings yet
- Glass-Ceramics For Photonic Applications: An ExampleDocument22 pagesGlass-Ceramics For Photonic Applications: An ExamplemadangkNo ratings yet
- A Review On The Machining of Nickel-TitaniumDocument8 pagesA Review On The Machining of Nickel-TitaniummadangkNo ratings yet
- Atom Probe Tomography Seeing Millions of Atomse280a6in 3DDocument5 pagesAtom Probe Tomography Seeing Millions of Atomse280a6in 3DmadangkNo ratings yet
- Shape MemoryDocument16 pagesShape MemoryFarooq MuhammadNo ratings yet
- GLASS DELAMINATION MICROPHASE SEPARATIONDocument23 pagesGLASS DELAMINATION MICROPHASE SEPARATIONmadangkNo ratings yet
- Solid-State Kinetic ModelsDocument15 pagesSolid-State Kinetic ModelsmadangkNo ratings yet
- Mechanical Properties of Solids ExplainedDocument180 pagesMechanical Properties of Solids ExplainedmadangkNo ratings yet
- ImagesDocument110 pagesImagesmadangkNo ratings yet
- Ceramic To Metal Joining ReportDocument9 pagesCeramic To Metal Joining ReportmadangkNo ratings yet
- Applications of The GentleMillT To FIB Prepared TEM SampleDocument6 pagesApplications of The GentleMillT To FIB Prepared TEM SamplemadangkNo ratings yet
- A Tale of Two DiagramsDocument8 pagesA Tale of Two DiagramsmadangkNo ratings yet
- Equipment For Acoustics 201 2020 NewDocument7 pagesEquipment For Acoustics 201 2020 NewTamás SzabóNo ratings yet
- Avt 721Document4 pagesAvt 721Martins StarastsNo ratings yet
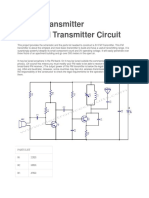
- 3V FM Transmitter 3V FM Transmitter CircuitDocument4 pages3V FM Transmitter 3V FM Transmitter Circuitpeter.gomes20087216No ratings yet
- APlus Catalog - AC6530MUDocument1 pageAPlus Catalog - AC6530MUNgọc TrầnNo ratings yet
- Microphone Techniques For Music - Studio RecordingDocument35 pagesMicrophone Techniques For Music - Studio RecordingMEPFIRNo ratings yet
- EI6401-Transducer Engineering PDFDocument16 pagesEI6401-Transducer Engineering PDFJeyamalar RajarajanNo ratings yet
- AKG Y500 Specifications ListDocument2 pagesAKG Y500 Specifications ListSergiu SergiuNo ratings yet
- DP4 ManualDocument199 pagesDP4 ManualdxnxbNo ratings yet
- VHF Transceivers: S-14319XZ-C1 Feb. 2007Document36 pagesVHF Transceivers: S-14319XZ-C1 Feb. 2007XHieu NguyenNo ratings yet
- Public Address System SpecificationDocument8 pagesPublic Address System SpecificationshivvaramNo ratings yet
- Svantek Folder 2012Document7 pagesSvantek Folder 2012Seguridad Medio Ambiente Servicios SacNo ratings yet
- ISS1.0 QRG Esprit 3G Web PDFDocument2 pagesISS1.0 QRG Esprit 3G Web PDFMelissa Araya SotoNo ratings yet
- Model 780-001 Indoor Explosion-Proof Single Party Handset StationDocument2 pagesModel 780-001 Indoor Explosion-Proof Single Party Handset StationIon NitaNo ratings yet
- Sistema Calibracion Audiometros - B&KDocument10 pagesSistema Calibracion Audiometros - B&KAndres MartinezNo ratings yet
- Bedienungsanleitung De: Testo 816 Sound Level MeterDocument18 pagesBedienungsanleitung De: Testo 816 Sound Level MeterAbdullah IshaqNo ratings yet
- CONDOR PGN-201 Service ManualDocument21 pagesCONDOR PGN-201 Service ManualMNAOUARNo ratings yet
- Cao 103.20Document8 pagesCao 103.20Lover Baby HackNo ratings yet
- PiezoBarrel Manual v6Document7 pagesPiezoBarrel Manual v6Eric SmithNo ratings yet
- Cad Trion Microphones Revised PDFDocument6 pagesCad Trion Microphones Revised PDFEsteban Bonilla JiménezNo ratings yet
- Microphone Quotation-ZHHDocument4 pagesMicrophone Quotation-ZHHKOUAMI DONKEE GBOLOHANo ratings yet
- Drawing For Final: 45, Namhannam-Ro, Yeongdo-Gu, Busan, Korea Tel: +82 51 412 5551, Fax: +82 51 412 6660Document84 pagesDrawing For Final: 45, Namhannam-Ro, Yeongdo-Gu, Busan, Korea Tel: +82 51 412 5551, Fax: +82 51 412 6660FILIN VLADIMIRNo ratings yet
- Bendix King Avionics SystemDocument45 pagesBendix King Avionics SystemJavierNo ratings yet
- Your Guide To A Perfect Self-Tape PDFDocument24 pagesYour Guide To A Perfect Self-Tape PDFJeremy HenryNo ratings yet
- Model PA300-012MSC Electronic Siren: Installation and Operating InstructionsDocument16 pagesModel PA300-012MSC Electronic Siren: Installation and Operating InstructionsDanielNo ratings yet
- FHDGDocument2 pagesFHDGWahidSyahruRamadhanNo ratings yet
- Tascam DR 100mkii Manual de UsuarioDocument60 pagesTascam DR 100mkii Manual de UsuarioSAMUEL ESTEBAN ZÚÑIGA MÁRQUEZNo ratings yet
- DFX Series Owner'S Manual: DFX - 6 and DFX - 12 6-And 12-Channel Mixers With Digital EffectsDocument24 pagesDFX Series Owner'S Manual: DFX - 6 and DFX - 12 6-And 12-Channel Mixers With Digital EffectsHoracio Casas RengifoNo ratings yet
- T-6700 Series IP Network Active Speakers (Offline Timing Play) T-6707LDocument1 pageT-6700 Series IP Network Active Speakers (Offline Timing Play) T-6707Lfahim_bdNo ratings yet
- Shure wh20 Headset Mic With XLR Connector For Balanced wh20xlr 116585 User ManualDocument10 pagesShure wh20 Headset Mic With XLR Connector For Balanced wh20xlr 116585 User Manualbata976No ratings yet
- Operating Instructions: MODEL ST-803 Sub-Minature DTMF Ani EncoderDocument6 pagesOperating Instructions: MODEL ST-803 Sub-Minature DTMF Ani EncoderJefferson Arley Alvarino GranadosNo ratings yet