You might also like
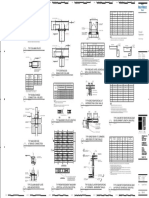
- S5-01 - Typical DetailsDocument1 pageS5-01 - Typical DetailsArdser AvicoNo ratings yet
- US Hex Bolt SizesDocument2 pagesUS Hex Bolt SizesYana Jarang OlNo ratings yet
- SAE Flat Washer Size ChartDocument1 pageSAE Flat Washer Size ChartArdser AvicoNo ratings yet
- ScrewDocument5 pagesScrewiqbaljuttNo ratings yet
- Metric Hex Bolt ChartsDocument1 pageMetric Hex Bolt ChartsPraburamNo ratings yet
- SAE Flat Washer Size ChartDocument1 pageSAE Flat Washer Size ChartArdser AvicoNo ratings yet
- Optional Tail Special Instructions: For More Info and Guides, Please VisitDocument5 pagesOptional Tail Special Instructions: For More Info and Guides, Please VisitArdser Avico100% (1)
- Metric/Imperial Screw Conversion ChartDocument1 pageMetric/Imperial Screw Conversion ChartArdser AvicoNo ratings yet
- RuleDocument1 pageRuledillehNo ratings yet
- Weld Joint Design and Weld SymbolDocument49 pagesWeld Joint Design and Weld SymbolArdser Avico100% (2)
- Pernos EquivalenciasDocument2 pagesPernos EquivalenciasEnriqueGDNo ratings yet
- Lab Manual Tutorial Part1Document12 pagesLab Manual Tutorial Part1Ardser AvicoNo ratings yet
- Weld Symbols On DrawingsDocument25 pagesWeld Symbols On Drawingshombre.muerto5959100% (2)
- Welding SymbolDocument11 pagesWelding SymbolManv2211No ratings yet
- Library IeeeDocument3 pagesLibrary IeeeArdser AvicoNo ratings yet
- Team Gobi FinalReportDocument51 pagesTeam Gobi FinalReportArdser AvicoNo ratings yet
- Welding PositionDocument6 pagesWelding Positionenels77No ratings yet
- Haskell Hanna ASEE2005 Paper2 PDFDocument12 pagesHaskell Hanna ASEE2005 Paper2 PDFArdser AvicoNo ratings yet
- Pmodkypd: Kpd1 R1 10K R2 10K R3 10K R4Document1 pagePmodkypd: Kpd1 R1 10K R2 10K R3 10K R4Ardser AvicoNo ratings yet
- Pmodkypd: Kpd1 R1 10K R2 10K R3 10K R4Document1 pagePmodkypd: Kpd1 R1 10K R2 10K R3 10K R4Ardser AvicoNo ratings yet
- ISE Installation, LicensingDocument54 pagesISE Installation, LicensingardserNo ratings yet
- VHDL 2di4341334Document112 pagesVHDL 2di4341334ardserNo ratings yet
- Jual: Alat Tulis, Kertas, Percetakan, Print, DLLDocument15 pagesJual: Alat Tulis, Kertas, Percetakan, Print, DLLArdser AvicoNo ratings yet
- Library IEE1Document3 pagesLibrary IEE1Ardser AvicoNo ratings yet
- HaskellDocument158 pagesHaskellArdser AvicoNo ratings yet
- Watchdog Timer For ATMDocument47 pagesWatchdog Timer For ATMm_sushil29No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- GTG - TFA Belt DrivenDocument2 pagesGTG - TFA Belt Drivensuan170No ratings yet
- Test Bank Chapter (4) : Choose The Correct AnswerDocument2 pagesTest Bank Chapter (4) : Choose The Correct AnswerteafNo ratings yet
- API2000 Tank Venting CalcsDocument5 pagesAPI2000 Tank Venting Calcsruhul01No ratings yet
- Chapter VI DP and NetworkDocument66 pagesChapter VI DP and NetworkSirgut TesfayeNo ratings yet
- North Sails Brochure 2007 enDocument24 pagesNorth Sails Brochure 2007 ennorthsailsNo ratings yet
- Business Analytics Data Analysis and Decision Making 6th Edition Albright Solutions ManualDocument24 pagesBusiness Analytics Data Analysis and Decision Making 6th Edition Albright Solutions ManualAngelaLewisyqza100% (26)
- Chapter 6 AssignmentDocument6 pagesChapter 6 AssignmentRohit RajeevNo ratings yet
- Shaping Plastic Forming1Document24 pagesShaping Plastic Forming1Himan JitNo ratings yet
- SkyCiv Beam - Hand Calculations - AJW8CTBuLE8YKrkKaG8KTtPAw8k74LSYDocument13 pagesSkyCiv Beam - Hand Calculations - AJW8CTBuLE8YKrkKaG8KTtPAw8k74LSYsaad rajawiNo ratings yet
- Ex450-5 Technical DrawingDocument12 pagesEx450-5 Technical DrawingTuan Pham AnhNo ratings yet
- MODULAR QUIZ - 57 - Steel DesignDocument9 pagesMODULAR QUIZ - 57 - Steel DesignCornelio J. FernandezNo ratings yet
- RomerDocument20 pagesRomerAkistaaNo ratings yet
- TMT Boron CoatingDocument6 pagesTMT Boron Coatingcvolkan1100% (2)
- Pressure Sensor Air PST Datasheet 51 en 2780071435Document3 pagesPressure Sensor Air PST Datasheet 51 en 2780071435Luis GuevaraNo ratings yet
- Latihan Matematik DLP Minggu 1Document3 pagesLatihan Matematik DLP Minggu 1Unit Sains Komputer MRSM PendangNo ratings yet
- WEEK 1, Grade 10Document2 pagesWEEK 1, Grade 10Sheela BatterywalaNo ratings yet
- I C Engine LabDocument3 pagesI C Engine LabDevNo ratings yet
- PDC NitDocument6 pagesPDC NitrpshvjuNo ratings yet
- Tutorial 1 SolutionsDocument4 pagesTutorial 1 Solutionsteju1996coolNo ratings yet
- Flexenclosure Esite Brochure PDFDocument5 pagesFlexenclosure Esite Brochure PDFajdCruiseNo ratings yet
- Tech Specs - TC 5540 PDFDocument2 pagesTech Specs - TC 5540 PDFziaarkiplanNo ratings yet
- HANA OverviewDocument69 pagesHANA OverviewSelva KumarNo ratings yet
- List of GHS Hazard Statement & PictogramsDocument33 pagesList of GHS Hazard Statement & PictogramsKhairul BarsriNo ratings yet
- Practice Question ElectricityDocument3 pagesPractice Question ElectricityIvan SetyawanNo ratings yet
- 3700 RES 5.5.1 Install GuideDocument38 pages3700 RES 5.5.1 Install Guidejlappi100% (1)
- Completing The Square PDFDocument10 pagesCompleting The Square PDFgreg heffleyNo ratings yet
- Lab 6Document12 pagesLab 6Sujan HeujuNo ratings yet
- Experiment No. 2 Rockwell Hardness Test IntroductionDocument3 pagesExperiment No. 2 Rockwell Hardness Test IntroductionAhmad Abd100% (1)
- Unit Exam 5Document3 pagesUnit Exam 5Rose AstoNo ratings yet