You might also like
- BJT AC DC & MultistageDocument42 pagesBJT AC DC & MultistageJose EspinoNo ratings yet
- Differential Amplifiers 10Document74 pagesDifferential Amplifiers 10Miguel Ángel MerinoNo ratings yet
- BOSS Slow Gear SG-1 Attack DelayDocument1 pageBOSS Slow Gear SG-1 Attack Delay大石 真義No ratings yet
- Optimum Array Processing: Part IV of Detection, Estimation, and Modulation TheoryFrom EverandOptimum Array Processing: Part IV of Detection, Estimation, and Modulation TheoryNo ratings yet
- SonoAce X8 v2.03.00-01 E PDFDocument476 pagesSonoAce X8 v2.03.00-01 E PDFDario BriceñoNo ratings yet
- Opamp Design and Summary by Nagendra KrishnapuraDocument41 pagesOpamp Design and Summary by Nagendra Krishnapurasoumyabose_etcNo ratings yet
- FAF6 AC80 D 01Document20 pagesFAF6 AC80 D 01adnantahir012873No ratings yet
- Digital To Analog ConvertersDocument39 pagesDigital To Analog ConvertersMANOJ MNo ratings yet
- IEC 62271-111 - Edition 2.0 2012-09 - ReconectadorDocument134 pagesIEC 62271-111 - Edition 2.0 2012-09 - ReconectadorAdolfo Falcón OlivasNo ratings yet
- CMOS InverterDocument97 pagesCMOS Invertercnt2ssk100% (8)
- Electronics Circuits Lab ManualDocument109 pagesElectronics Circuits Lab ManualIndische Mädchen100% (2)
- Ehlers (CG Oscillator)Document4 pagesEhlers (CG Oscillator)seanunr100% (1)
- Cascode 190Document4 pagesCascode 190Raulh PerezNo ratings yet
- Design of Analog Filters ShauumanDocument7 pagesDesign of Analog Filters ShauumanReem El-Adawi50% (4)
- Sar Adc 65nm PHD PDFDocument87 pagesSar Adc 65nm PHD PDFLex LutherNo ratings yet
- Mpms Combi Controller Fault CodesDocument4 pagesMpms Combi Controller Fault CodesFatih YÜKSELNo ratings yet
- EE3706 - Chapter 5 - Operational AmplifiersDocument34 pagesEE3706 - Chapter 5 - Operational AmplifiersQuang Huy Doan NgocNo ratings yet
- Colpitts Oscillator Using Op Amp PDFDocument2 pagesColpitts Oscillator Using Op Amp PDFStewartNo ratings yet
- Filter PDFDocument21 pagesFilter PDFNugraha PratamaNo ratings yet
- Experiment No. 4 Common Emitter Amplifier AIM: Fig 1. Circuit DiagramDocument4 pagesExperiment No. 4 Common Emitter Amplifier AIM: Fig 1. Circuit Diagrampandiyarajan142611No ratings yet
- Multistage Transistor AmplifiersDocument8 pagesMultistage Transistor Amplifiersbree789No ratings yet
- Emg FiltersDocument48 pagesEmg FiltersTeheranNo ratings yet
- Passive Low Pass FilterDocument5 pagesPassive Low Pass FilterAnonymous SOQFPWBNo ratings yet
- Chapter 7 Amplifier Frequency Response PDFDocument32 pagesChapter 7 Amplifier Frequency Response PDFVijaykumarPatilNo ratings yet
- Sallen Key Low Pass FilterDocument4 pagesSallen Key Low Pass FilterPhilip Caesar EbitNo ratings yet
- Band-Pass Filter Design ProjectDocument15 pagesBand-Pass Filter Design ProjectTim LauxNo ratings yet
- Transistor Active High Pass Filter Electronics NotesDocument2 pagesTransistor Active High Pass Filter Electronics NotesRenato DeákNo ratings yet
- Wireless FM Microphone CircuitDocument2 pagesWireless FM Microphone Circuitcuongspvl2713No ratings yet
- Non-Inverting Operational Amplifier ConfigurationDocument10 pagesNon-Inverting Operational Amplifier ConfigurationMirHaiderAliShaurov100% (1)
- Pro Co Rat AnalysisDocument16 pagesPro Co Rat AnalysisgianmarcoNo ratings yet
- PT3 - 13 - FSK Modulator PDFDocument20 pagesPT3 - 13 - FSK Modulator PDFTempaNo ratings yet
- Basic VLSI SlidesDocument91 pagesBasic VLSI SlidesDivya AhujaNo ratings yet
- Differential AmplifierDocument15 pagesDifferential AmplifierrppvchNo ratings yet
- 12 Mosfet BiasingDocument18 pages12 Mosfet BiasingManish KumarNo ratings yet
- Eca Lab Manual PDFDocument56 pagesEca Lab Manual PDFrppvch100% (5)
- UNIT 3-2marks-FET PDFDocument9 pagesUNIT 3-2marks-FET PDFpriyanka236No ratings yet
- Adders and MultipliersDocument59 pagesAdders and Multipliersdbanbumani_501791840No ratings yet
- FIR Filter Kaiser WindowDocument16 pagesFIR Filter Kaiser WindowAshira JayaweeraNo ratings yet
- VLSI I - V CharacteristicsDocument46 pagesVLSI I - V CharacteristicsMALATHI .LNo ratings yet
- ME2142/ME2142E Feedback Control Systems Solutions To Tutorial Problems Set 3 March 2007Document8 pagesME2142/ME2142E Feedback Control Systems Solutions To Tutorial Problems Set 3 March 2007desmondlimmNo ratings yet
- 16 IIR Filter DesignDocument23 pages16 IIR Filter DesignManisman ParidaNo ratings yet
- Eca Lab ManualDocument78 pagesEca Lab ManualNageswariah.MNo ratings yet
- Low Power Optimization of Full Adder Circuit Based On Gdi Logic For Biomedical ApplicationsDocument11 pagesLow Power Optimization of Full Adder Circuit Based On Gdi Logic For Biomedical ApplicationsIJAR JOURNALNo ratings yet
- Solved ProblemsDocument24 pagesSolved ProblemsParth Cholera100% (1)
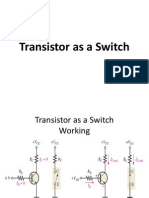
- Transistor As A SwitchDocument6 pagesTransistor As A SwitchMayank Agarwal100% (1)
- Tiq ComparatorDocument16 pagesTiq ComparatorKuldeep GuptaNo ratings yet
- Analog Signal ConditioningDocument115 pagesAnalog Signal ConditioningAmmad Ilyas100% (1)
- Microwave and Wireless SynthesizersDocument819 pagesMicrowave and Wireless SynthesizersvasikasNo ratings yet
- Chapter 12Document51 pagesChapter 12h7q290587No ratings yet
- Chapter 4 - RF Oscillators and Frequency SynthesizersDocument55 pagesChapter 4 - RF Oscillators and Frequency SynthesizersNhat Tran Xuan100% (1)
- Colpitts Oscillator Design PDFDocument2 pagesColpitts Oscillator Design PDFShayNo ratings yet
- VLSI Ch4 DelayDocument27 pagesVLSI Ch4 Delayជើងកាង ភូមិNo ratings yet
- Chapter 02 Basic Concepts in RF DesignDocument110 pagesChapter 02 Basic Concepts in RF DesignBilal HabibNo ratings yet
- Soft FundDocument135 pagesSoft Fundsruthimannam28No ratings yet
- Class D Ucd Beta01 06.12Document1 pageClass D Ucd Beta01 06.12luizcpimentaNo ratings yet
- Seminar TopicDocument36 pagesSeminar TopicNarasing ManeNo ratings yet
- The Transistor Astable Multi VibratorDocument6 pagesThe Transistor Astable Multi VibratorTavleen KaurNo ratings yet
- FM RadioBoosterDocument2 pagesFM RadioBoosterVijay MirjeNo ratings yet
- LIC FLEXI Lab Manual Second Experiment Student Copy-3Document5 pagesLIC FLEXI Lab Manual Second Experiment Student Copy-3Vignesh RamakrishnanNo ratings yet
- Crystal OscillatorDocument7 pagesCrystal OscillatorParesh SawantNo ratings yet
- Digital Signal Processing Systems: Implementation Techniques: Advances in Theory and ApplicationsFrom EverandDigital Signal Processing Systems: Implementation Techniques: Advances in Theory and ApplicationsNo ratings yet
- Impulse Breakdown On Lighting Protection Device at Distribution LinesDocument13 pagesImpulse Breakdown On Lighting Protection Device at Distribution Linesdes1982No ratings yet
- A View On Internal Arc Testing of LV SwitchgearDocument8 pagesA View On Internal Arc Testing of LV Switchgeardes1982No ratings yet
- 1210 Nis Petrovic 263-267 PDFDocument5 pages1210 Nis Petrovic 263-267 PDFSalNo ratings yet
- Evaluation of Substation Bus Schemes Considering ReliabilityDocument6 pagesEvaluation of Substation Bus Schemes Considering Reliabilitydes1982No ratings yet
- Improved Electrical Safety Through High Resistance GroundingDocument6 pagesImproved Electrical Safety Through High Resistance Groundingdes1982No ratings yet
- Harmonic Emission Limits For Customers Connected To MV HV EHVDocument4 pagesHarmonic Emission Limits For Customers Connected To MV HV EHVdes1982No ratings yet
- Transformer Failure Due To Circuit Breaker Induced SwitchingsDocument13 pagesTransformer Failure Due To Circuit Breaker Induced Switchingsdes1982No ratings yet
- Electrical Interferences in SFRA Measurements Article 2016 ENUDocument15 pagesElectrical Interferences in SFRA Measurements Article 2016 ENUykh92167No ratings yet
- Managing The Risk of Protection Relay Failure: Project Specification Consultation ReportDocument42 pagesManaging The Risk of Protection Relay Failure: Project Specification Consultation Reportdes1982No ratings yet
- A New Criterion Needed To Evaluate Reliability of Digital Protective RelaysDocument5 pagesA New Criterion Needed To Evaluate Reliability of Digital Protective Relaysdes1982No ratings yet
- Estimation of Replacement of Numerical Relay SystemsDocument6 pagesEstimation of Replacement of Numerical Relay Systemsdes1982No ratings yet
- Condition-Based MaintenanceDocument4 pagesCondition-Based Maintenancedes1982No ratings yet
- A Maintenance Strategy of Improving The Reliability of Relay ProtectionDocument7 pagesA Maintenance Strategy of Improving The Reliability of Relay Protectiondes1982No ratings yet
- Energies: Classical Failure Modes and E Context of Smart Grid Cyber-Physical SystemsDocument26 pagesEnergies: Classical Failure Modes and E Context of Smart Grid Cyber-Physical SystemssrobayocNo ratings yet
- Jicable2015 LiraDocument6 pagesJicable2015 Lirades1982No ratings yet
- IEEE Vol 23 No 3 June 2016 - Guarding MV Cables On-LineDocument8 pagesIEEE Vol 23 No 3 June 2016 - Guarding MV Cables On-Linedes1982No ratings yet
- CIRED2007 0779 Paper PDFDocument6 pagesCIRED2007 0779 Paper PDFdes1982No ratings yet
- The Full Underground Distribution Transformer in Practice: Cired Cired Cired CiredDocument4 pagesThe Full Underground Distribution Transformer in Practice: Cired Cired Cired Cireddes1982No ratings yet
- Reliability Measures: Failure and Root Cause Analysis (FRCA) For GIS Early FailureDocument5 pagesReliability Measures: Failure and Root Cause Analysis (FRCA) For GIS Early Failuredes1982No ratings yet
- Reliability Measures: Failure and Root Cause Analysis (FRCA) For GIS Early FailureDocument5 pagesReliability Measures: Failure and Root Cause Analysis (FRCA) For GIS Early Failuredes1982No ratings yet
- 2007 Jicable - Permanent On-Line Monitoring of MV Cables - An Update PDFDocument6 pages2007 Jicable - Permanent On-Line Monitoring of MV Cables - An Update PDFdes1982No ratings yet
- 2015 Jicable - Risk On Failure Based On PD Measurements in Actual MV PILC and XLPE Cables.Document3 pages2015 Jicable - Risk On Failure Based On PD Measurements in Actual MV PILC and XLPE Cables.des1982No ratings yet
- 2016 Cepsi - On-Line Fault Detection and Localization in Medium Voltage NetworkDocument6 pages2016 Cepsi - On-Line Fault Detection and Localization in Medium Voltage Networkdes1982No ratings yet
- 2016 Cepsi - On-Line Fault Detection and Localization in Medium Voltage NetworkDocument6 pages2016 Cepsi - On-Line Fault Detection and Localization in Medium Voltage Networkdes1982No ratings yet
- CIRED 2011 - 0875 - FinalDocument4 pagesCIRED 2011 - 0875 - Finaldes1982No ratings yet
- 2014 CEPSI - On-Line PD and Fault Location With SCGDocument8 pages2014 CEPSI - On-Line PD and Fault Location With SCGdes1982No ratings yet
- 2014 CEPSI - On-Line PD and Fault Location With SCGDocument8 pages2014 CEPSI - On-Line PD and Fault Location With SCGdes1982No ratings yet
- 2007 Jicable - Permanent On-Line Monitoring of MV Cables - An Update PDFDocument6 pages2007 Jicable - Permanent On-Line Monitoring of MV Cables - An Update PDFdes1982No ratings yet
- Cired 2015 - 1044 - SCGDocument5 pagesCired 2015 - 1044 - SCGdes1982No ratings yet
- Cigre 2016 - B1-205Document9 pagesCigre 2016 - B1-205des1982No ratings yet
- Footstep Power Generation Using Piezoelectric SensorDocument16 pagesFootstep Power Generation Using Piezoelectric SensorShivam KumarNo ratings yet
- List Alat Commisioning EDRDocument1 pageList Alat Commisioning EDRAndri WahyudiNo ratings yet
- Rim Seal Fire Protection SystemDocument21 pagesRim Seal Fire Protection SystemSuraj singhNo ratings yet
- Miniature Helical PCB Antenna For 868 MHZ or 915-920 MHZDocument25 pagesMiniature Helical PCB Antenna For 868 MHZ or 915-920 MHZA.G. MonteroNo ratings yet
- Symptom TroubleshootingDocument7 pagesSymptom TroubleshootingSebastian SirventNo ratings yet
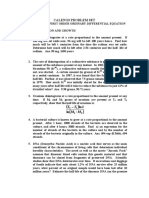
- Caleng3 - Problem Set - Q2Document5 pagesCaleng3 - Problem Set - Q2Rheina VelasquezNo ratings yet
- RUS - Long-Range Planning GuideDocument43 pagesRUS - Long-Range Planning GuideClaud RichmondNo ratings yet
- Anexa 1 QXP85A4-03D-VIDocument14 pagesAnexa 1 QXP85A4-03D-VIstelea7577No ratings yet
- Sony - PCM-1610 - Professional Digital Audio ProcessorDocument6 pagesSony - PCM-1610 - Professional Digital Audio ProcessorxychenNo ratings yet
- OTC000005 OTN Introduction ISSUE1.00Document73 pagesOTC000005 OTN Introduction ISSUE1.00Mohammed Kumayl100% (1)
- Speed Control of DC Motor Using Mobile PhoneDocument4 pagesSpeed Control of DC Motor Using Mobile PhonegowrishankarplNo ratings yet
- 37D Metal Gearmotors: Performance Summary and Table of ContentsDocument18 pages37D Metal Gearmotors: Performance Summary and Table of ContentsDavid Castillo UribeNo ratings yet
- Argillon Insulators EnglishDocument8 pagesArgillon Insulators EnglishHillary McgowanNo ratings yet
- BM Mvs Pix Standard User Manual-Final DraftDocument68 pagesBM Mvs Pix Standard User Manual-Final Draftoktavianficky11No ratings yet
- 3m Peltor Communications Catalogue PDFDocument52 pages3m Peltor Communications Catalogue PDFRa UlNo ratings yet
- Automatic Generation Control in A Deregulated Power SystemDocument6 pagesAutomatic Generation Control in A Deregulated Power SystemamaytaNo ratings yet
- 9 BEE AC ListDocument16 pages9 BEE AC ListKarthek EyanNo ratings yet
- Polymer Memory: Bachelor of Technology IN Electronics and Communication EngineeringDocument25 pagesPolymer Memory: Bachelor of Technology IN Electronics and Communication EngineeringSateesh Kuna100% (1)
- 02 - Sect 7 5 The Canonical Model - enDocument5 pages02 - Sect 7 5 The Canonical Model - enAnanatha KarthikNo ratings yet
- Balluff BES 516-325-S4-C BES01C8Document2 pagesBalluff BES 516-325-S4-C BES01C8celsocarneiroNo ratings yet
- 85010-0133 - EST3 Central Processor UnitDocument4 pages85010-0133 - EST3 Central Processor UnitmohammadNo ratings yet
- Dgt801b Gen - Unit ADocument30 pagesDgt801b Gen - Unit ASamraddh TiwariNo ratings yet
- Application Note 2034 LM3445 - 120VAC, 8W Isolated Flyback LED DriverDocument20 pagesApplication Note 2034 LM3445 - 120VAC, 8W Isolated Flyback LED DriverEduardoNo ratings yet
- Sensor Tekanan SKU237545Document1 pageSensor Tekanan SKU237545Apra PashterNo ratings yet
- High Voltage CoilsDocument20 pagesHigh Voltage CoilsMarco SussuaranaNo ratings yet