You might also like
- S5-42 DatasheetDocument2 pagesS5-42 Datasheetchillin_in_bots100% (1)
- TRW Pintle EngineDocument23 pagesTRW Pintle EngineMuhammad Azeem AhmadNo ratings yet
- Photographing Shadow and Light by Joey L. - ExcerptDocument9 pagesPhotographing Shadow and Light by Joey L. - ExcerptCrown Publishing Group75% (4)
- Twenty-Five Years of Ramjet Development: William H. AveryDocument11 pagesTwenty-Five Years of Ramjet Development: William H. AveryHoàng DavidNo ratings yet
- Guidance Equations For LaunchDocument40 pagesGuidance Equations For Launchedkyle99No ratings yet
- Cryogenic Rocket EngineDocument59 pagesCryogenic Rocket EngineVikramNo ratings yet
- Scale Models in Engineering: Fundamentals and ApplicationsFrom EverandScale Models in Engineering: Fundamentals and ApplicationsNo ratings yet
- The Plasma Dispersion Function: The Hilbert Transform of the GaussianFrom EverandThe Plasma Dispersion Function: The Hilbert Transform of the GaussianRating: 5 out of 5 stars5/5 (1)
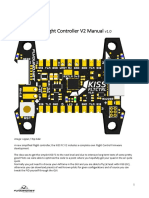
- Flyduino KISS Flight Controller V2 Manual: Image: Upper / Top SideDocument19 pagesFlyduino KISS Flight Controller V2 Manual: Image: Upper / Top SideBruno MarcheseNo ratings yet
- Introduction To Cryogenic EngineDocument6 pagesIntroduction To Cryogenic Engineshadma ansariNo ratings yet
- OrangeRx R610 Spektrum DSM2 6Ch 2Document10 pagesOrangeRx R610 Spektrum DSM2 6Ch 2Simon GanelesNo ratings yet
- MODELING MODEL ROCKETS: OPTIMIZING ROCKETRYDocument20 pagesMODELING MODEL ROCKETS: OPTIMIZING ROCKETRYMario Puppi100% (1)
- Rocketry AerodynamicsDocument56 pagesRocketry AerodynamicsHyan GontijoNo ratings yet
- Newsletter 346Document9 pagesNewsletter 346pete pansNo ratings yet
- RocketDocument45 pagesRocketDefenceDog100% (1)
- Spacecraft Propulsion: The Necessity For Propulsion SystemDocument17 pagesSpacecraft Propulsion: The Necessity For Propulsion SystemfunfrancisNo ratings yet
- Prandtl's Lifting-Line Theory for Incompressible Flow Over Finite WingsDocument30 pagesPrandtl's Lifting-Line Theory for Incompressible Flow Over Finite WingsrevandifitroNo ratings yet
- A Systems Engineering Approach To Unmanned AerialDocument23 pagesA Systems Engineering Approach To Unmanned AerialAriefa YusabihNo ratings yet
- Monocopter Report FinalDocument24 pagesMonocopter Report FinalAnshul KhandelwalNo ratings yet
- An Introduction To Radio Control SailplanesDocument33 pagesAn Introduction To Radio Control SailplanesBill KuhlNo ratings yet
- OpenRocket - Technical DocumentationDocument127 pagesOpenRocket - Technical DocumentationMark_DVNo ratings yet
- Best Airfoil for Small RC ModelsDocument6 pagesBest Airfoil for Small RC ModelsJosé Luiz CamargoNo ratings yet
- Self-Balancing Robot Using Raspberry Pi and PID ControllerDocument2 pagesSelf-Balancing Robot Using Raspberry Pi and PID ControllerInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Design of A Solid Rocket Propulsion System-IJASAR-2470-4415-07-201Document6 pagesDesign of A Solid Rocket Propulsion System-IJASAR-2470-4415-07-201gedlu solomonNo ratings yet
- Rocket Science ReportDocument10 pagesRocket Science Reportapi-245787501No ratings yet
- Aero SpikeDocument40 pagesAero Spikelevaka_vinay463No ratings yet
- (K. F. Long) Deep Space Propulsion - A Roadmap To Interstellar Flight (2011)Document378 pages(K. F. Long) Deep Space Propulsion - A Roadmap To Interstellar Flight (2011)Shyam PatelNo ratings yet
- Rocket TypesDocument28 pagesRocket TypesHarnil VaghasiyaNo ratings yet
- The Aztec UFO Hoax and The Will To Believe, Part I - The Fred Reed StoryDocument4 pagesThe Aztec UFO Hoax and The Will To Believe, Part I - The Fred Reed StoryPaul KimballNo ratings yet
- Supersonic Aircraft PropulsionDocument5 pagesSupersonic Aircraft PropulsionRaajeswaran BaskaranNo ratings yet
- Shelby Bates Kevin Chun Eric GambillDocument64 pagesShelby Bates Kevin Chun Eric GambillEricNo ratings yet
- P-15 Termit: Anti-Ship Missile Soviet UnionDocument4 pagesP-15 Termit: Anti-Ship Missile Soviet UnionJuan Gomez GomezNo ratings yet
- Linear Aerospike EngineDocument51 pagesLinear Aerospike EngineSanad ShajahanNo ratings yet
- TS 4317 XDocument12 pagesTS 4317 Xwaldo545100% (1)
- H. G. White and E. W. Davis - The AlcubierreWarp Drive in Higher Dimensional SpacetimeDocument22 pagesH. G. White and E. W. Davis - The AlcubierreWarp Drive in Higher Dimensional SpacetimeHuntsmithNo ratings yet
- Physics of Nuclear Fusion: Reactions: IsotopesDocument4 pagesPhysics of Nuclear Fusion: Reactions: IsotopesMuhammad AnoshNo ratings yet
- Concise Title for Military Radar System Presentation TranscriptDocument5 pagesConcise Title for Military Radar System Presentation Transcriptajay100% (1)
- Progress On Hyper Velocity Railgun Research For Launch To SpaceDocument8 pagesProgress On Hyper Velocity Railgun Research For Launch To SpacetexasrunNo ratings yet
- Missile Guidance Using GBSDocument19 pagesMissile Guidance Using GBSمحمد علىNo ratings yet
- Adaptive Missile Guidance Using GpsDocument9 pagesAdaptive Missile Guidance Using Gpsjamesyblee100% (1)
- Book - Experimental Rocketry - Build Your Rocket in 20 HrsDocument23 pagesBook - Experimental Rocketry - Build Your Rocket in 20 Hrsborad abhishekNo ratings yet
- Daiflisttati On: (Baticflal Tcraut1CDocument647 pagesDaiflisttati On: (Baticflal Tcraut1CSPUTNIK1958No ratings yet
- Qa 00632 Cryogenic Engine in Rocket Propulsion Mechanical Seminar TopicDocument27 pagesQa 00632 Cryogenic Engine in Rocket Propulsion Mechanical Seminar TopicDhurai Rajiv GandhiNo ratings yet
- NASA Guide to Solid Rocket Motor Nozzle DesignDocument140 pagesNASA Guide to Solid Rocket Motor Nozzle DesignSteen5100% (1)
- Elementary Principles of Aeroplane DesignDocument130 pagesElementary Principles of Aeroplane DesignDavid Russo100% (2)
- EDFpart1 1Document16 pagesEDFpart1 1Anonymous 9KWAHowj5FNo ratings yet
- Aeromodeller Annual 1949Document96 pagesAeromodeller Annual 1949drumy60No ratings yet
- JetpackDocument12 pagesJetpackAlamcoNo ratings yet
- Adventures in Rocket ScienceDocument178 pagesAdventures in Rocket ScienceSelvin PrinceNo ratings yet
- TOW - Tube-Launched - Optically Tracked - Wire-Guided Missle Rocket MotorDocument1 pageTOW - Tube-Launched - Optically Tracked - Wire-Guided Missle Rocket MotorhdslmnNo ratings yet
- Techniques For Measurement of Dynamic Stability Derivatives in Ground Test FacilitiesDocument236 pagesTechniques For Measurement of Dynamic Stability Derivatives in Ground Test FacilitieseeebbbuuuNo ratings yet
- Measurement, Instrumentation, Sensors Handbook: Spatial, Mechanical, Thermal, Radiation MeasurementDocument26 pagesMeasurement, Instrumentation, Sensors Handbook: Spatial, Mechanical, Thermal, Radiation MeasurementDavid Ramirez AlanocaNo ratings yet
- FRR FinalDocument80 pagesFRR Finaldth1933No ratings yet
- Orbital MechanicsDocument59 pagesOrbital MechanicsTomy1969No ratings yet
- Arduino Applied: Comprehensive Projects for Everyday ElectronicsFrom EverandArduino Applied: Comprehensive Projects for Everyday ElectronicsNo ratings yet
- Communication Satellite Systems Technology: A Collection of Technical Papers Drawn Mainly from the AIAA Communications Satellite Systems Conference, May 2-4, 1966From EverandCommunication Satellite Systems Technology: A Collection of Technical Papers Drawn Mainly from the AIAA Communications Satellite Systems Conference, May 2-4, 1966No ratings yet
- Model Aeroplanes and Their Engines: A Practical Book for BeginnersFrom EverandModel Aeroplanes and Their Engines: A Practical Book for BeginnersNo ratings yet
- Essentials of Lasers: The Commonwealth and International Library: Selected Readings in PhysicsFrom EverandEssentials of Lasers: The Commonwealth and International Library: Selected Readings in PhysicsNo ratings yet
- Re-Entry and Vehicle Design: Proceedings of the Fifth Symposium on Ballistic Missile and Space Technology, Held in Los Angeles, California, in August, 1960From EverandRe-Entry and Vehicle Design: Proceedings of the Fifth Symposium on Ballistic Missile and Space Technology, Held in Los Angeles, California, in August, 1960Donald P. LegalleyNo ratings yet
- Electrostatic PropulsionFrom EverandElectrostatic PropulsionDavid LangmuirNo ratings yet
- 8.1 Interaction Diagrams: Interaction Diagrams Are Used To Model The Dynamic Aspects of A Software SystemDocument13 pages8.1 Interaction Diagrams: Interaction Diagrams Are Used To Model The Dynamic Aspects of A Software SystemSatish JadhaoNo ratings yet
- Data Sheet: Experiment 5: Factors Affecting Reaction RateDocument4 pagesData Sheet: Experiment 5: Factors Affecting Reaction Ratesmuyet lêNo ratings yet
- Trading As A BusinessDocument169 pagesTrading As A Businesspetefader100% (1)
- Malware Reverse Engineering Part 1 Static AnalysisDocument27 pagesMalware Reverse Engineering Part 1 Static AnalysisBik AshNo ratings yet
- KPMG Inpection ReportDocument11 pagesKPMG Inpection ReportMacharia NgunjiriNo ratings yet
- Oxford Digital Marketing Programme ProspectusDocument12 pagesOxford Digital Marketing Programme ProspectusLeonard AbellaNo ratings yet
- IoT BASED HEALTH MONITORING SYSTEMDocument18 pagesIoT BASED HEALTH MONITORING SYSTEMArunkumar Kuti100% (2)
- Report Emerging TechnologiesDocument97 pagesReport Emerging Technologiesa10b11No ratings yet
- Artist Biography: Igor Stravinsky Was One of Music's Truly Epochal Innovators No Other Composer of TheDocument2 pagesArtist Biography: Igor Stravinsky Was One of Music's Truly Epochal Innovators No Other Composer of TheUy YuiNo ratings yet
- En dx300lc 5 Brochure PDFDocument24 pagesEn dx300lc 5 Brochure PDFsaroniNo ratings yet
- Tigo Pesa Account StatementDocument7 pagesTigo Pesa Account StatementPeter Ngicur Carthemi100% (1)
- Rohit Patil Black BookDocument19 pagesRohit Patil Black BookNaresh KhutikarNo ratings yet
- AFNOR IPTDS BrochureDocument1 pageAFNOR IPTDS Brochurebdiaconu20048672No ratings yet
- Attributes and DialogsDocument29 pagesAttributes and DialogsErdenegombo MunkhbaatarNo ratings yet
- Resume Template & Cover Letter Bu YoDocument4 pagesResume Template & Cover Letter Bu YoRifqi MuttaqinNo ratings yet
- Describing-Jobs-British-English StudentDocument3 pagesDescribing-Jobs-British-English Studentrenata pedroso100% (1)
- Water Jet CuttingDocument15 pagesWater Jet CuttingDevendar YadavNo ratings yet
- Fernandez ArmestoDocument10 pagesFernandez Armestosrodriguezlorenzo3288No ratings yet
- Pita Cyrel R. Activity 7Document5 pagesPita Cyrel R. Activity 7Lucky Lynn AbreraNo ratings yet
- Marine Engineering 1921Document908 pagesMarine Engineering 1921Samuel Sneddon-Nelmes0% (1)
- Yellowstone Food WebDocument4 pagesYellowstone Food WebAmsyidi AsmidaNo ratings yet
- Family Service and Progress Record: Daughter SeptemberDocument29 pagesFamily Service and Progress Record: Daughter SeptemberKathleen Kae Carmona TanNo ratings yet
- Quality Management in Digital ImagingDocument71 pagesQuality Management in Digital ImagingKampus Atro Bali0% (1)
- Axe Case Study - Call Me NowDocument6 pagesAxe Case Study - Call Me NowvirgoashishNo ratings yet
- Unit 3 Computer ScienceDocument3 pagesUnit 3 Computer ScienceradNo ratings yet
- The Impact of School Facilities On The Learning EnvironmentDocument174 pagesThe Impact of School Facilities On The Learning EnvironmentEnrry Sebastian71% (31)
- Riddles For KidsDocument15 pagesRiddles For KidsAmin Reza100% (8)