You might also like
- MAK 411E Automotive Lab Manual Center of Gravity Brake Force DistributionDocument22 pagesMAK 411E Automotive Lab Manual Center of Gravity Brake Force DistributionAndrei ItemNo ratings yet
- TUe 4AUB20 Exercise3Document4 pagesTUe 4AUB20 Exercise3Saad ullah ZiaNo ratings yet
- Axle ShaftsDocument13 pagesAxle ShaftsankitsarvaiyaNo ratings yet
- Vehicle Dynamics NotesDocument116 pagesVehicle Dynamics NotesJagadesh AbbuNo ratings yet
- Nav 009Document10 pagesNav 009Vishnu Vardhan Reddy YerasiNo ratings yet
- Nikhil PawarDocument16 pagesNikhil PawarNikhil PawarNo ratings yet
- Vehicle Dynamics For Racing GamesDocument18 pagesVehicle Dynamics For Racing GameskrishnasrikanthNo ratings yet
- Vehicle Dynamics For Racing GamesDocument18 pagesVehicle Dynamics For Racing GamescsorionutNo ratings yet
- Chassis Da2Document13 pagesChassis Da2sanchit sawantNo ratings yet
- Brake Design and SafetyDocument20 pagesBrake Design and SafetyLuiz Gustavo MedeirosNo ratings yet
- Digital Assignment - 1: Name: Shaik Naveed REG NO:20BMA0032 Subject: Automotive ChassisDocument8 pagesDigital Assignment - 1: Name: Shaik Naveed REG NO:20BMA0032 Subject: Automotive ChassisNaveed kingNo ratings yet
- Axle ShaftsDocument14 pagesAxle ShaftsAnonymous QiMB2lBCJLNo ratings yet
- C. Kalavrytinos - FEA of A Steering KnuckleDocument26 pagesC. Kalavrytinos - FEA of A Steering KnuckleChristos Kalavrytinos100% (7)
- Handling CharacteristicsDocument15 pagesHandling CharacteristicsSaket NihalNo ratings yet
- A Skid Steering Model With Track Pad Flexibility 2007 Journal of TerramechanicsDocument16 pagesA Skid Steering Model With Track Pad Flexibility 2007 Journal of TerramechanicsSetiyawan TrioNo ratings yet
- Handle Bar Vibration MmotorcycleDocument12 pagesHandle Bar Vibration MmotorcycleabhijitNo ratings yet
- Center of GravityDocument7 pagesCenter of GravityAnonymous QiMB2lBCJLNo ratings yet
- CH 02Document118 pagesCH 02RODRIGO JAVIER BRIZUELA PADILLANo ratings yet
- Optimal Roll Center Height of Front McPherson SuspensionDocument7 pagesOptimal Roll Center Height of Front McPherson SuspensionRaksha AroraNo ratings yet
- Steering DesignDocument6 pagesSteering DesignAsif HussainNo ratings yet
- Random Vibration Analysis For The Chassis Frame of Hydraulic Truck Based On AnsysDocument4 pagesRandom Vibration Analysis For The Chassis Frame of Hydraulic Truck Based On Ansysbilal sarfrazNo ratings yet
- Center of GravityDocument6 pagesCenter of GravityAnonymous QiMB2lBCJLNo ratings yet
- Smoothing The Ride: A Simple ModelDocument16 pagesSmoothing The Ride: A Simple ModelChristian QuitoNo ratings yet
- Vehicle Dynamics Under Longitudinal ForcesDocument10 pagesVehicle Dynamics Under Longitudinal ForcesNeerajNo ratings yet
- Subjects Auto Eng Center of GravityDocument6 pagesSubjects Auto Eng Center of GravityAmit GauravNo ratings yet
- Unit 3 Dynnamic HevDocument38 pagesUnit 3 Dynnamic HevsavitaNo ratings yet
- Front-and-Rear-Wheel-Independent-Drive-Type Electric Vehicle (FRID EV) With Compatible Driving Performance and SafetyDocument10 pagesFront-and-Rear-Wheel-Independent-Drive-Type Electric Vehicle (FRID EV) With Compatible Driving Performance and Safetykkumaran32No ratings yet
- Planetary Gear SystemDocument11 pagesPlanetary Gear SystemNikhil NairNo ratings yet
- Modelling of Tilting and Steering Control System FDocument7 pagesModelling of Tilting and Steering Control System FKhaled N ShmaitNo ratings yet
- Redesign Bristol Fighter Car SuspensionDocument25 pagesRedesign Bristol Fighter Car SuspensionHartmann Yosef0% (1)
- Mathcad - GeneralDocument17 pagesMathcad - Generalapi-232034744No ratings yet
- Véhicule - Rayon de GirationDocument23 pagesVéhicule - Rayon de GirationjfejfeNo ratings yet
- Car Suspension Over BumpDocument23 pagesCar Suspension Over BumpVairasivam Karisna KumarNo ratings yet
- Chassis design analysis and load casesDocument35 pagesChassis design analysis and load casesArjun H Nambiar100% (1)
- Rear Axle ConstructionDocument19 pagesRear Axle ConstructionMohseen KarcheNo ratings yet
- Parametric Analysis of Four Wheel Vehicle Using Adams/Car: Jadav Chetan S. Patel Priyal RDocument6 pagesParametric Analysis of Four Wheel Vehicle Using Adams/Car: Jadav Chetan S. Patel Priyal RInternational Journal of computational Engineering research (IJCER)No ratings yet
- BMA4723 Vehicle DynamicsDocument327 pagesBMA4723 Vehicle DynamicsFu Hong100% (3)
- Engineering Failure Analysis: Li-Hui Zhao, Song-Lin Zheng, Jin-Zhi FengDocument10 pagesEngineering Failure Analysis: Li-Hui Zhao, Song-Lin Zheng, Jin-Zhi FengShivNo ratings yet
- Final Suspension DesignDocument60 pagesFinal Suspension DesignSNEHASIS MOHANTY100% (1)
- Theory Da1Document13 pagesTheory Da1sanchit sawantNo ratings yet
- HVP - Notes Unit 1.3 Conventional Vehicle PerformanceDocument12 pagesHVP - Notes Unit 1.3 Conventional Vehicle PerformanceDevansh SrivastavaNo ratings yet
- Development of Integrated Control of Electronic Stability ControlDocument6 pagesDevelopment of Integrated Control of Electronic Stability ControlSantiago Puma Puma AraujoNo ratings yet
- Prediction of Car Ground ClearanceDocument5 pagesPrediction of Car Ground ClearancedessaaNo ratings yet
- Tractor COG and StabilityDocument2 pagesTractor COG and StabilityVijay ChavanNo ratings yet
- HA and HB LoadingDocument8 pagesHA and HB LoadingBolarinwa100% (2)
- Ideal Longl Force Distribution For A 4WD VehicleDocument7 pagesIdeal Longl Force Distribution For A 4WD VehicleAlbert LohNo ratings yet
- Vehicle Dynamics For Racing GamesDocument16 pagesVehicle Dynamics For Racing GamesVijay PawarNo ratings yet
- Dynamics of Machinery 2 Marks All 5 UnitsDocument14 pagesDynamics of Machinery 2 Marks All 5 UnitsDHINAKARANVEEMAN100% (2)
- Space Frame DesignDocument5 pagesSpace Frame DesignAmeer ShNo ratings yet
- Calculating Commercial Vehicle Weight DistributionDocument8 pagesCalculating Commercial Vehicle Weight DistributiondejejuniorNo ratings yet
- Stress Analysis Tractor TrailerDocument8 pagesStress Analysis Tractor TrailerBONARCOSNo ratings yet
- Vehicle Dynamics Auto 4312Document11 pagesVehicle Dynamics Auto 4312Shuguta LatiNo ratings yet
- Crankshaft VibrationDocument8 pagesCrankshaft VibrationjohansolNo ratings yet
- ME 316 Homework 3Document2 pagesME 316 Homework 3Sumit BhNo ratings yet
- Chapter 1 - Introduction To Suspension DynamicsDocument48 pagesChapter 1 - Introduction To Suspension DynamicsGowtham GNo ratings yet
- High Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsFrom EverandHigh Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsNo ratings yet
- Modeling of Complex Systems: Application to Aeronautical DynamicsFrom EverandModeling of Complex Systems: Application to Aeronautical DynamicsNo ratings yet
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- Synthesis of Biopolymers Proteins, Polyesters, PolysaccharidesDocument5 pagesSynthesis of Biopolymers Proteins, Polyesters, PolysaccharidesSenthil Muthu Kumar TNo ratings yet
- Rapid PrototypingDocument3 pagesRapid PrototypingSenthil Muthu Kumar TNo ratings yet
- The Fingerprint of BiopolymersDocument3 pagesThe Fingerprint of BiopolymersSenthil Muthu Kumar TNo ratings yet
- Automotive Laboratory Manual: MAK 411E Experimental Methods in Mechanical EngineeringDocument22 pagesAutomotive Laboratory Manual: MAK 411E Experimental Methods in Mechanical EngineeringSenthil Muthu Kumar TNo ratings yet
- Automotive Safety - AUT408: Understanding Traffic Signs and Signals - Unit 1Document39 pagesAutomotive Safety - AUT408: Understanding Traffic Signs and Signals - Unit 1Senthil Muthu Kumar TNo ratings yet
- Combustion Technology Guide to Fuels, Reactions, Flames & Engine ProcessesDocument1 pageCombustion Technology Guide to Fuels, Reactions, Flames & Engine ProcessesSenthil Muthu Kumar TNo ratings yet
- Quick Review Ic EnginesDocument87 pagesQuick Review Ic EnginesVikram ManthriNo ratings yet
- Engines Teaching ManualDocument151 pagesEngines Teaching ManualSenthil Muthu Kumar TNo ratings yet
- Auto - Power PlugDocument1 pageAuto - Power PlugSenthil Muthu Kumar TNo ratings yet
- AUT 281 Course PlanDocument3 pagesAUT 281 Course PlanSenthil Muthu Kumar TNo ratings yet
- School of Mechanical Sciences (SMS) : Kalasalingam UniversityDocument5 pagesSchool of Mechanical Sciences (SMS) : Kalasalingam UniversitySenthil Muthu Kumar TNo ratings yet
- Ch11metalcastingprocDocument74 pagesCh11metalcastingprocCharurat KongyangNo ratings yet
- Grease Testing HandoutDocument27 pagesGrease Testing HandoutSenthil Muthu Kumar TNo ratings yet
- A - Unsprung Mass Is Kept Minimum: - Is The Central Components of The Chain Converter Transmission.Document6 pagesA - Unsprung Mass Is Kept Minimum: - Is The Central Components of The Chain Converter Transmission.Senthil Muthu Kumar TNo ratings yet
- Hydrodynamic Drive Unit - 2Document28 pagesHydrodynamic Drive Unit - 2Senthil Muthu Kumar TNo ratings yet
- Ch05 Control ChartsDocument29 pagesCh05 Control Charts87bbNo ratings yet
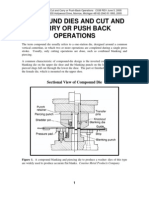
- Compound Die DesignDocument6 pagesCompound Die Designfzulkarnaen_1No ratings yet
- MEC207Document4 pagesMEC207Senthil Muthu Kumar TNo ratings yet
- Automotive Safety HandbookDocument2 pagesAutomotive Safety HandbookSenthil Muthu Kumar T0% (1)
- ESEC Alumni SurveyDocument2 pagesESEC Alumni SurveySenthil Muthu Kumar TNo ratings yet
- Engineering Management NotesDocument188 pagesEngineering Management NotesJoyce Ann CleofeNo ratings yet
- MBA IInd SEM POM Chapter 01 IntroDocument43 pagesMBA IInd SEM POM Chapter 01 IntroPravie100% (1)
- Kitchen Equipment Dimensions and SpecsDocument25 pagesKitchen Equipment Dimensions and SpecselektrikCi124No ratings yet
- Substation Filter BankSpecsDocument7 pagesSubstation Filter BankSpecsTudor BostanNo ratings yet
- Manaul de Partes Bws 1 YmDocument53 pagesManaul de Partes Bws 1 YmRobinson GuanemeNo ratings yet
- Ussocom 006Document52 pagesUssocom 006RTSLLCNo ratings yet
- Sample Problem 3.4Document13 pagesSample Problem 3.4Emerson Ipiales GudiñoNo ratings yet
- Radiography 2 ProcedureDocument9 pagesRadiography 2 ProceduresheikmoinNo ratings yet
- Geotech Final ReportDocument38 pagesGeotech Final Reportapi-320590292No ratings yet
- Ce1a3q E1a3qDocument5 pagesCe1a3q E1a3qapi-239041842No ratings yet
- Mastertop TC 458 PDFDocument3 pagesMastertop TC 458 PDFFrancois-No ratings yet
- Group Presentation on CIM, Database Systems and Product Life CyclesDocument23 pagesGroup Presentation on CIM, Database Systems and Product Life Cyclesশাহীন আহেমদNo ratings yet
- Desmodure-Rfe-Tds CROSSLİNKİNG AGENTDocument2 pagesDesmodure-Rfe-Tds CROSSLİNKİNG AGENTGİZEM DEMİRNo ratings yet
- Seismic Analysis of A Valley-Fill Heap Leach PadDocument17 pagesSeismic Analysis of A Valley-Fill Heap Leach PadMARCOS ABRAHAM ALEJANDRO BALDOCEDA HUAYASNo ratings yet
- Durehete 1055Document5 pagesDurehete 1055alextentwenty100% (1)
- Cantonk HD-Analog Cameras Price List V201407BDocument7 pagesCantonk HD-Analog Cameras Price List V201407BCatalin StefanutNo ratings yet
- GEOtouch®PET NEEDLE-PUNCHED NONWOVEN GEOTEXTILEDocument1 pageGEOtouch®PET NEEDLE-PUNCHED NONWOVEN GEOTEXTILEManas Kumar SamalNo ratings yet
- 6991 1767 01b - Diamec U4 - LRDocument4 pages6991 1767 01b - Diamec U4 - LRPABLONo ratings yet
- TL2 Number SystemsDocument78 pagesTL2 Number SystemsKhushbu SavaliyaNo ratings yet
- Eiac RQ Ib 004Document25 pagesEiac RQ Ib 004esivaks2000100% (1)
- Ion Thruster GuideDocument16 pagesIon Thruster GuideMimsisiNo ratings yet
- Lars Part Ix - Safety Managment System Requirements-SmsDocument24 pagesLars Part Ix - Safety Managment System Requirements-SmssebastienNo ratings yet
- RGD AccessAbility Handbook 2015 ForWebFINAL-s PDFDocument32 pagesRGD AccessAbility Handbook 2015 ForWebFINAL-s PDFtiago87pintoNo ratings yet
- SiliconeSurfactants SILTECHDocument6 pagesSiliconeSurfactants SILTECHA MahmoodNo ratings yet
- Introduction To Strain GaugesDocument32 pagesIntroduction To Strain GaugesManjunatha Babu N.s100% (1)
- Projection Achievement ReportDocument8 pagesProjection Achievement ReportPskaruppiah KarupsNo ratings yet
- Supports For Pipelines 1758uk 7-03-15 PDFDocument46 pagesSupports For Pipelines 1758uk 7-03-15 PDFAndor MolitoriszNo ratings yet
- Indigo GdpiDocument1 pageIndigo Gdpimanoj agrawallaNo ratings yet
- The Existence of An External Redundancy ASM DiskgroupDocument55 pagesThe Existence of An External Redundancy ASM Diskgroupsidd_aish@yahoo.comNo ratings yet
- Profile Correction of A Helical Gear Shaping CutterDocument11 pagesProfile Correction of A Helical Gear Shaping Cutterdanielk32No ratings yet
- An Introduction To Orgone Matrix Material (Jon Logan)Document42 pagesAn Introduction To Orgone Matrix Material (Jon Logan)Jose CiprianiNo ratings yet