You might also like
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysFrom EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysNo ratings yet
- Superalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceFrom EverandSuperalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceNo ratings yet
- Elements FinisDocument15 pagesElements FinisYounesHamoudiNo ratings yet
- Mécanique Non LinéaireDocument95 pagesMécanique Non LinéaireGhassen Ben Amor100% (1)
- Poutres Continues PDFDocument29 pagesPoutres Continues PDFSaâd AziamNo ratings yet
- Calcul de Structure I PDFDocument92 pagesCalcul de Structure I PDFBram's U Yafelman100% (1)
- MMC CoursDocument100 pagesMMC CoursCheikh DjoudiNo ratings yet
- Mecanique Des Materiaux Solides - 2013Document142 pagesMecanique Des Materiaux Solides - 2013tamarin1955100% (1)
- Une Presentation de La MEFDocument562 pagesUne Presentation de La MEFyeuminh100% (1)
- Ouvrage 2 Concours Technologue Session 2015 Slim ChouchenDocument172 pagesOuvrage 2 Concours Technologue Session 2015 Slim ChouchenYamen Ben AmmarNo ratings yet
- Introduction À La Méthode Des Éléments Finis - KERN MichelDocument68 pagesIntroduction À La Méthode Des Éléments Finis - KERN Michelanahimc100% (2)
- Mécanique Des Milieux Continus, Tome 2 ThermoélasticitéDocument339 pagesMécanique Des Milieux Continus, Tome 2 Thermoélasticitéwatsop100% (1)
- TP Contact Abaqus Etu 21 22Document12 pagesTP Contact Abaqus Etu 21 22Anthony QNo ratings yet
- Book Mef Deghboudj SamirDocument96 pagesBook Mef Deghboudj SamirAsma BousameNo ratings yet
- Cours Elements FinisDocument44 pagesCours Elements FinisOussama BouraouiNo ratings yet
- Comportement Mecanique Et Analyse Des Structures 5 Ed SommaireDocument24 pagesComportement Mecanique Et Analyse Des Structures 5 Ed SommaireDawoud Fali100% (1)
- Structures en Matériaux CompositesDocument18 pagesStructures en Matériaux Compositesmanel_drNo ratings yet
- Exercice Fluage D'une Poutre en FlexionDocument4 pagesExercice Fluage D'une Poutre en FlexionScribd ReaderNo ratings yet
- Morin - Fatigue Thermomécanique Des Matériaux À Mémoire de FormeDocument42 pagesMorin - Fatigue Thermomécanique Des Matériaux À Mémoire de FormeaureliomecanicaNo ratings yet
- Etude de La Conjonction Poutre PlaqueDocument137 pagesEtude de La Conjonction Poutre PlaqueHammam KalouchNo ratings yet
- Limido JeromeDocument242 pagesLimido JeromeDelmouly CélineNo ratings yet
- F18992Document25 pagesF18992Mario PoirierNo ratings yet
- Chapitre - 1 - Introduction À La MEF - PPSXDocument35 pagesChapitre - 1 - Introduction À La MEF - PPSXMohamed ZaharNo ratings yet
- Rappels Elements FinisDocument69 pagesRappels Elements FinisvttrlcNo ratings yet
- MMC Bon Cours PDFDocument172 pagesMMC Bon Cours PDFMeryem Berr67% (3)
- Mecanique Des Milieu Continue أبDocument68 pagesMecanique Des Milieu Continue أبbenabedmNo ratings yet
- Easy Gps Anselmetti 11 Fév 2016Document285 pagesEasy Gps Anselmetti 11 Fév 2016Alexandra CorcozNo ratings yet
- Mécanique Des Milieux Continus Tome IDocument383 pagesMécanique Des Milieux Continus Tome IRachid Zekraoui50% (2)
- GradientDocument3 pagesGradientrihame92No ratings yet
- Resolution Equation Differentielle 2eme OrdreDocument10 pagesResolution Equation Differentielle 2eme OrdrezianisatNo ratings yet
- Composites PDFDocument102 pagesComposites PDFMaria100% (2)
- (Nf04) CM AnsysDocument77 pages(Nf04) CM AnsysBadii GmachNo ratings yet
- Cours de MMC Esstt GCDocument95 pagesCours de MMC Esstt GCKhalil MamiNo ratings yet
- 9782010171048Document50 pages9782010171048Nadia KefifNo ratings yet
- Cours de Mecanique Des Materiaux SolidesDocument60 pagesCours de Mecanique Des Materiaux SolidesKamel BousninaNo ratings yet
- CRET Gpoujons Pour Charges Transversales EleveesDocument20 pagesCRET Gpoujons Pour Charges Transversales EleveesbastopheNo ratings yet
- MEF PoutreDocument9 pagesMEF PoutreAbdelmajid HmNo ratings yet
- Isolation Thermique Guide IsoverDocument143 pagesIsolation Thermique Guide Isoverelitepaintball MortagneNo ratings yet
- Cast3m Prise en MainDocument71 pagesCast3m Prise en MainJustin Dirrenberger100% (1)
- Loi de ComportementDocument29 pagesLoi de ComportementnassimighilNo ratings yet
- 113 DMS B2 EF4 ReyDocument58 pages113 DMS B2 EF4 ReyMalcolm EmileNo ratings yet
- Couplage ThermomécaniqueDocument12 pagesCouplage ThermomécaniqueAzize Razam100% (1)
- Etude Statique Non Lineaire R+2Document76 pagesEtude Statique Non Lineaire R+2Hammadi TaharNo ratings yet
- Analyse Des Structures de Plaque en Matériaux Composites Par Différents Types D'éléments FinisDocument109 pagesAnalyse Des Structures de Plaque en Matériaux Composites Par Différents Types D'éléments FinisinboxmailNo ratings yet
- Presentation Cast3MDocument92 pagesPresentation Cast3MSeyf ToujaniNo ratings yet
- Calcul Poutre AlvDocument279 pagesCalcul Poutre AlvYassir Nj100% (1)
- Introduction À La PlasticitéDocument49 pagesIntroduction À La PlasticitéMellier100% (1)
- Mecaniques Des Milieux Continus, Tome 3 Milieux CurvilignesDocument162 pagesMecaniques Des Milieux Continus, Tome 3 Milieux Curviligneswatsop100% (1)
- Cours RDM Esith 20-21Document125 pagesCours RDM Esith 20-21walid alouaniNo ratings yet
- Generaliees Sur Les Materiaux Composites CompositesDocument48 pagesGeneraliees Sur Les Materiaux Composites CompositesSaid DjaballahNo ratings yet
- Modéliser et simuler: Epistémologies et pratiques de la modélisation et de la simulation. Tome 2From EverandModéliser et simuler: Epistémologies et pratiques de la modélisation et de la simulation. Tome 2No ratings yet
- Probabilités et statistiques: Ce que j'en ai compris, si ça peut aider…From EverandProbabilités et statistiques: Ce que j'en ai compris, si ça peut aider…No ratings yet
- Galilei Et Einstein: Réflexions Sur La Théorie De La Relativité General - La Chute Libre Des CorpsFrom EverandGalilei Et Einstein: Réflexions Sur La Théorie De La Relativité General - La Chute Libre Des CorpsNo ratings yet
- 4 - Chapitre III - Méthode Des Éléments FinisDocument9 pages4 - Chapitre III - Méthode Des Éléments FinisMohamed Reffadi100% (3)
- TP CFDDocument7 pagesTP CFDRyad GuiraNo ratings yet
- Chapitre I MEF DocumentDocument39 pagesChapitre I MEF DocumentJelly GiroudNo ratings yet
- Procédure ANSYS v2Document21 pagesProcédure ANSYS v2Mor Talla ThiamNo ratings yet
- TP Assemblage 1Document1 pageTP Assemblage 1Paky KapyNo ratings yet
- MasseDocument1 pageMassePaky KapyNo ratings yet
- Dynamique Des Vehicules 1 PDFDocument10 pagesDynamique Des Vehicules 1 PDFPaky KapyNo ratings yet
- Tab SalleDocument1 pageTab SallePaky KapyNo ratings yet
- 5 PDFDocument1 page5 PDFPaky KapyNo ratings yet
- Analyse Numérique 2 - CoursDocument53 pagesAnalyse Numérique 2 - Coursing_taharNo ratings yet
- Dynamique Des Vehicules 3Document22 pagesDynamique Des Vehicules 3Paky KapyNo ratings yet
- D D V: C 2 I V - S: Institut National Des Sciences Appliquées de LyonDocument1 pageD D V: C 2 I V - S: Institut National Des Sciences Appliquées de LyonPaky KapyNo ratings yet
- 3 PDFDocument1 page3 PDFPaky KapyNo ratings yet
- Dynamique Des Vehicules 2Document10 pagesDynamique Des Vehicules 2Paky KapyNo ratings yet
- Diagramme MoodyDocument14 pagesDiagramme MoodyAbderrahim SalhiNo ratings yet
- Diffusion PDFDocument9 pagesDiffusion PDFPaky KapyNo ratings yet
- Analyse Num - Liège PDFDocument146 pagesAnalyse Num - Liège PDFPaky KapyNo ratings yet
- Analyse Numérique 1 - Approximation de FonctionsDocument18 pagesAnalyse Numérique 1 - Approximation de Fonctionsing_taharNo ratings yet
- Prevention Des Risques Prof PDFDocument11 pagesPrevention Des Risques Prof PDFPaky KapyNo ratings yet
- Hygiene Au TravailDocument60 pagesHygiene Au TravailPaky KapyNo ratings yet
- Hygiène Au Travail UnlockerDocument13 pagesHygiène Au Travail UnlockerApollos_80No ratings yet
- DP Foh 1418284253 PDFDocument11 pagesDP Foh 1418284253 PDFPaky KapyNo ratings yet
- Haccp Codex AlimentariusDocument29 pagesHaccp Codex Alimentariussonden_2100% (2)
- TransfDocument2 pagesTransfPaky Kapy100% (1)
- HemorroidesDocument1 pageHemorroidesPaky KapyNo ratings yet
- Ictère PDFDocument3 pagesIctère PDFPaky KapyNo ratings yet
- Ascite PDFDocument1 pageAscite PDFPaky KapyNo ratings yet
- 118 Maladie de Crohn Et Recto-Colite Hémorragique PDFDocument2 pages118 Maladie de Crohn Et Recto-Colite Hémorragique PDFPaky Kapy100% (1)
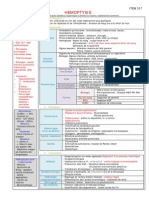
- HemoptysieDocument1 pageHemoptysiePaky KapyNo ratings yet
- BezierDocument5 pagesBeziering_taharNo ratings yet
- LADocument1 pageLAPaky KapyNo ratings yet
- Usinage 4 AxeDocument4 pagesUsinage 4 AxePaky KapyNo ratings yet
- Preparation de FabricationDocument10 pagesPreparation de FabricationPaky KapyNo ratings yet
- KRUPS EA8010 User GuideDocument144 pagesKRUPS EA8010 User Guide79andiNo ratings yet
- kpg fr C epr2 2023Α 121856Document2 pageskpg fr C epr2 2023Α 121856Kostas AmanatidisNo ratings yet
- Ed 1476Document2 pagesEd 1476Nabil SouissiNo ratings yet
- Le Mandala de L'être, Par Richard MossDocument2 pagesLe Mandala de L'être, Par Richard MossJoop-le-philosophe100% (1)
- Memoire ERPDocument78 pagesMemoire ERPmacao100100% (2)
- AwoumouDocument15 pagesAwoumouresineNo ratings yet
- HG EMC Serie Generale 1Document8 pagesHG EMC Serie Generale 1Arthur CriereNo ratings yet
- Cours Complet de Stratif 2Document109 pagesCours Complet de Stratif 2woodruff1986No ratings yet
- Documents SVT .PC .MathDocument152 pagesDocuments SVT .PC .MathTrésor KoffiNo ratings yet
- Pathologie Et Renovation 1Document38 pagesPathologie Et Renovation 1Zalvet ChristianNo ratings yet
- Machine Thermique ExamDocument4 pagesMachine Thermique ExamYassineHijazi100% (3)
- Chapitre 1 Généralité Sur Les Machines AsynchronesDocument23 pagesChapitre 1 Généralité Sur Les Machines AsynchronesFiroDjinsoNano0% (1)
- GELE5340 Notes5Document32 pagesGELE5340 Notes5Theo WanNo ratings yet
- Developpement LmitesDocument12 pagesDeveloppement LmitesJadli AissamNo ratings yet
- VinyleDocument3 pagesVinylechristopheNo ratings yet
- Bindjeme EllaDocument5 pagesBindjeme EllaCrystal BskNo ratings yet
- Guide Rédaction PFE, Mr. Abdellatif AbbesDocument6 pagesGuide Rédaction PFE, Mr. Abdellatif AbbesAllani Ahmed Riadh100% (11)
- Corrigé Fiche RecursivitéDocument5 pagesCorrigé Fiche Recursivitébassirou kaneNo ratings yet
- Exam S6 1 Eco Gest 18 19Document1 pageExam S6 1 Eco Gest 18 19Amine StiouniNo ratings yet
- Sisr4 05 tp1 Pws Niveau 2Document12 pagesSisr4 05 tp1 Pws Niveau 2api-296100887No ratings yet
- I-II Lois de L'optique GéométriqueDocument7 pagesI-II Lois de L'optique Géométriquenakaruru55No ratings yet
- 34 ElectromecaniqueDocument51 pages34 ElectromecaniqueStairway To Heaven MoreNo ratings yet
- Comment Bien Travailler en Équipe Et Améliorer Radicalement Vos RésultatsDocument6 pagesComment Bien Travailler en Équipe Et Améliorer Radicalement Vos RésultatsTETRACONE GEOTECHNIQUENo ratings yet
- Planification Reseau MobileDocument3 pagesPlanification Reseau MobileAnonymous xQL931pvTvNo ratings yet
- Capital RisqueDocument40 pagesCapital RisqueMustapha Elmoadin100% (1)
- NF En12464-1Document57 pagesNF En12464-1Hugo DEVIGENo ratings yet
- ISO 14001 Guide de TransitionDocument12 pagesISO 14001 Guide de TransitionBadr BouslamaNo ratings yet
- Fiche Aquaponie 2013 CoursDocument9 pagesFiche Aquaponie 2013 Coursresearchfr100% (2)
- Audit Comptable Et FinancierDocument95 pagesAudit Comptable Et FinancierHicham Messid0% (1)
- U Rythme Des Mots 2 PDFDocument160 pagesU Rythme Des Mots 2 PDFJade Zapata50% (2)