You might also like
- Ux Myths Poster EngDocument32 pagesUx Myths Poster EngPaskualNo ratings yet
- CISSP Cheat Sheet Domain 3Document1 pageCISSP Cheat Sheet Domain 3Zainulabdin100% (4)
- NG - Argument Reduction For Huge Arguments: Good To The Last BitDocument8 pagesNG - Argument Reduction For Huge Arguments: Good To The Last BitDerek O'ConnorNo ratings yet
- College of Engineering: Optimal Economic Load Dispatch Using Novel Bat AlgorithmDocument23 pagesCollege of Engineering: Optimal Economic Load Dispatch Using Novel Bat AlgorithmJean-nette BarlisanNo ratings yet
- CFD Manifold FlowDocument17 pagesCFD Manifold FlowMohamed SaeedNo ratings yet
- Quality Council of Indiana document details versions of certification materialsDocument47 pagesQuality Council of Indiana document details versions of certification materialsMelissa MurrayNo ratings yet
- Traditional Vs Agile Project ManagementDocument6 pagesTraditional Vs Agile Project ManagementSaurav Panda100% (1)
- Adaptive Evolutionary Approach Solves Short-Term Electrical Generation SchedulingDocument15 pagesAdaptive Evolutionary Approach Solves Short-Term Electrical Generation SchedulingSantiago CabreraNo ratings yet
- Arduino-based temperature control system for infant incubatorsDocument6 pagesArduino-based temperature control system for infant incubatorsFaizan AhmadNo ratings yet
- N Adaptive PID Controller Based On Genetic Algorithm ProcessorDocument6 pagesN Adaptive PID Controller Based On Genetic Algorithm ProcessorEngr Nayyer Nayyab MalikNo ratings yet
- Paper Okmf Carla2015Document14 pagesPaper Okmf Carla2015Raul RamosNo ratings yet
- Entropy: Optimization For Software Implementation of Fractional Calculus Numerical Methods in An Embedded SystemDocument14 pagesEntropy: Optimization For Software Implementation of Fractional Calculus Numerical Methods in An Embedded SystemasdNo ratings yet
- Notes CodeDocument8 pagesNotes CodeIsmael ArceNo ratings yet
- High-Performance Modular Multiplication OnDocument18 pagesHigh-Performance Modular Multiplication OnHiywot yesufNo ratings yet
- Thermal Unit Commitment Solution Using An Improved Lagrangian RelaxationDocument8 pagesThermal Unit Commitment Solution Using An Improved Lagrangian RelaxationWisnuPrayogoNo ratings yet
- A Combinatorial Approach To Level of Repair AnalysisDocument10 pagesA Combinatorial Approach To Level of Repair AnalysisŞahin ALPASLANNo ratings yet
- Software for PID Design Benefits and PitfallsDocument6 pagesSoftware for PID Design Benefits and PitfallsAleksandar MicicNo ratings yet
- Robust PID controller toolbox using convex optimizationDocument6 pagesRobust PID controller toolbox using convex optimizationAnonymous WkbmWCa8MNo ratings yet
- Informs: INFORMS Is Collaborating With JSTOR To Digitize, Preserve and Extend Access To Operations ResearchDocument25 pagesInforms: INFORMS Is Collaborating With JSTOR To Digitize, Preserve and Extend Access To Operations ResearchhessamhoorNo ratings yet
- Department of Computer Science: Celestijnenlaan 200A (B-3001 Heverlee (Belgium)Document38 pagesDepartment of Computer Science: Celestijnenlaan 200A (B-3001 Heverlee (Belgium)maheshnagarkarNo ratings yet
- Alexandre Faure Et Al - GTOBAS: Fitting Continuum Functions With Gaussian-Type OrbitalsDocument18 pagesAlexandre Faure Et Al - GTOBAS: Fitting Continuum Functions With Gaussian-Type OrbitalsWippetsxzNo ratings yet
- Odeint - Solving ODEs in C++ with container-independent libraryDocument4 pagesOdeint - Solving ODEs in C++ with container-independent libraryMSUIITNo ratings yet
- Improved Particle Swarm Optimisation For Multi-Objective Optimal Power Flow Considering The Cost, Loss, Emission and Voltage Stability IndexDocument13 pagesImproved Particle Swarm Optimisation For Multi-Objective Optimal Power Flow Considering The Cost, Loss, Emission and Voltage Stability IndexAhmed WestministerNo ratings yet
- The Study of Crop Pest Forecasting Using GP: Miao Li, Tao Sun, Jian ZhangDocument8 pagesThe Study of Crop Pest Forecasting Using GP: Miao Li, Tao Sun, Jian ZhangPrecious GiwaNo ratings yet
- FFFDocument24 pagesFFFEngr Nayyer Nayyab MalikNo ratings yet
- A Computational Comparison of Two Different Approaches To Solve The Multi-Area Optimal Power FlowDocument4 pagesA Computational Comparison of Two Different Approaches To Solve The Multi-Area Optimal Power FlowFlores JesusNo ratings yet
- CFD Graphical Interface in MATLAB PDFDocument7 pagesCFD Graphical Interface in MATLAB PDFAhmadreza AminianNo ratings yet
- Informs Operations Research: This Content Downloaded From 130.104.59.131 On Mon, 12 Nov 2018 15:25:15 UTCDocument18 pagesInforms Operations Research: This Content Downloaded From 130.104.59.131 On Mon, 12 Nov 2018 15:25:15 UTCezffsdgNo ratings yet
- First Year Engineering Problem Solving Labs - Final Project INSTRUCTIONS - VF - 2019F PDFDocument12 pagesFirst Year Engineering Problem Solving Labs - Final Project INSTRUCTIONS - VF - 2019F PDFAntur RakhaNo ratings yet
- Solving The Permutation Flow Shop Problem With Makespan Criterion Using GridsDocument12 pagesSolving The Permutation Flow Shop Problem With Makespan Criterion Using Gridsferronatto11No ratings yet
- A Survey of Lot Sizing and Scheduling ModelsDocument10 pagesA Survey of Lot Sizing and Scheduling ModelsClebson CardosoNo ratings yet
- Project Report Molecular Dynamics CMSC6920Document4 pagesProject Report Molecular Dynamics CMSC6920Nasir DanialNo ratings yet
- Real-Time Optimization and Nonlinear Model Predictive Control of Processes Governed by Differential-Algebraic EquationsDocument9 pagesReal-Time Optimization and Nonlinear Model Predictive Control of Processes Governed by Differential-Algebraic EquationsIngole DeepakNo ratings yet
- System Model H (T) Inlet E (T) Outlet E H (T) System Model H (T) Inlet E (T) Outlet E H (T)Document19 pagesSystem Model H (T) Inlet E (T) Outlet E H (T) System Model H (T) Inlet E (T) Outlet E H (T)WillykateKairuNo ratings yet
- The PDynamo Program For Molecular Simulations UsingDocument11 pagesThe PDynamo Program For Molecular Simulations UsingAndrés SalazarNo ratings yet
- A Practical Introduction To Data Structures and Algorithm AnalysisDocument346 pagesA Practical Introduction To Data Structures and Algorithm AnalysisantenehgebNo ratings yet
- SCIP - A Framework To Integrate Constraint and Mixed Integer ProgrammingDocument29 pagesSCIP - A Framework To Integrate Constraint and Mixed Integer Programmingmhenley8059No ratings yet
- IMC Based Robust PID Design: Tuning Guidelines and Automatic TuningDocument10 pagesIMC Based Robust PID Design: Tuning Guidelines and Automatic TuningCharlesNo ratings yet
- GPU-Based Parallel Ant Colony Algorithm Speeds Up Scientific Workflow SchedulingDocument10 pagesGPU-Based Parallel Ant Colony Algorithm Speeds Up Scientific Workflow SchedulingSavan SinghNo ratings yet
- A New Approach For Minimizing Buffer Capacities With Throughput Constraint For Embedded System DesignDocument8 pagesA New Approach For Minimizing Buffer Capacities With Throughput Constraint For Embedded System DesignNaresh BopparathiNo ratings yet
- Res 1 DDocument7 pagesRes 1 DDeokumar Lachhman100% (1)
- Chapter - 1: Another Problem During The Time of Optimizing Any Objective FunctionsDocument14 pagesChapter - 1: Another Problem During The Time of Optimizing Any Objective FunctionsHossein HosseinNo ratings yet
- Lab Guide 1: Instruction Level Parallelism and Matrix MultiplicationDocument3 pagesLab Guide 1: Instruction Level Parallelism and Matrix MultiplicationJoão LourençoNo ratings yet
- Recent Advances in Practical Finite Element AnalysisDocument11 pagesRecent Advances in Practical Finite Element AnalysismariomatoNo ratings yet
- Low Memory Cost Dynamic Scheduling of Large Coarse Grain Task GraphsDocument7 pagesLow Memory Cost Dynamic Scheduling of Large Coarse Grain Task GraphsRosário CunhaNo ratings yet
- Interfacing IPOPT With Aspen Open Solvers and CAPE-OPENDocument6 pagesInterfacing IPOPT With Aspen Open Solvers and CAPE-OPEN赵雷No ratings yet
- User Guide Incompact3d V1-0Document8 pagesUser Guide Incompact3d V1-0Danielle HaysNo ratings yet
- Optimal Tuning of Fractional Order PI D Controllers Using Genetic AlgorithmsDocument6 pagesOptimal Tuning of Fractional Order PI D Controllers Using Genetic AlgorithmsabdieljosadacNo ratings yet
- Analysis of Mergesort AlgorithmDocument12 pagesAnalysis of Mergesort AlgorithmAkash deepNo ratings yet
- Implementation of Low Power and High Speed Multiplier-Accumulator Using SPST Adder and VerilogDocument8 pagesImplementation of Low Power and High Speed Multiplier-Accumulator Using SPST Adder and Verilogsujaganesan2009No ratings yet
- GS-OPT: A New Fast Stochastic Algorithm For Solving The Non-Convex Optimization ProblemDocument10 pagesGS-OPT: A New Fast Stochastic Algorithm For Solving The Non-Convex Optimization ProblemIAES IJAINo ratings yet
- International Journal of Computational Engineering Research (IJCER)Document11 pagesInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)No ratings yet
- Breaking Through Memory Limitation in GPU Parallel Processing Using Strassen AlgorithmDocument5 pagesBreaking Through Memory Limitation in GPU Parallel Processing Using Strassen AlgorithmDonkeyTankNo ratings yet
- Transformer Top-Oil Temperature Modeling and Simulation: T. C. B. N. Assunção, J. L. Silvino, and P. ResendeDocument6 pagesTransformer Top-Oil Temperature Modeling and Simulation: T. C. B. N. Assunção, J. L. Silvino, and P. ResendeConstantin Dorinel0% (1)
- Espresso Heuristic Logic MinimizerDocument4 pagesEspresso Heuristic Logic MinimizerAnshul PawaskarNo ratings yet
- 3 - Global Optimization by Differential Evolution in C++Document13 pages3 - Global Optimization by Differential Evolution in C++Khoi TruongNo ratings yet
- ODSExams MergedDocument103 pagesODSExams MergedAhmed AliNo ratings yet
- Fast Technique For Unit Commitment by Genetic Algorithm Based On Unit ClusteringDocument9 pagesFast Technique For Unit Commitment by Genetic Algorithm Based On Unit ClusteringAn Nguyễn KhánhNo ratings yet
- pDynamo Simulates Hybrid QC/MM PotentialsDocument11 pagespDynamo Simulates Hybrid QC/MM PotentialsrickynbgNo ratings yet
- Economic Load Dispatch Using A Chemotactic Differential Evolution AlgorithmDocument8 pagesEconomic Load Dispatch Using A Chemotactic Differential Evolution AlgorithmSandeep SahuNo ratings yet
- Dynamic Programming MatlabDocument6 pagesDynamic Programming MatlabRitesh SinghNo ratings yet
- Code Optimization: A Project Report ONDocument21 pagesCode Optimization: A Project Report ONApache SierraNo ratings yet
- Integer Optimization and its Computation in Emergency ManagementFrom EverandInteger Optimization and its Computation in Emergency ManagementNo ratings yet
- Parabolic Trough Collector PTCDocument2 pagesParabolic Trough Collector PTCCarloyos Hoyos100% (1)
- 2002 Kalogirou - EstDocument26 pages2002 Kalogirou - EstCarloyos HoyosNo ratings yet
- Peer Reviewed Title:: Previously Published Works UC IrvineDocument17 pagesPeer Reviewed Title:: Previously Published Works UC IrvineCarloyos HoyosNo ratings yet
- Computers and Chemical Engineering: Adaptation Strategies For Real-Time OptimizationDocument11 pagesComputers and Chemical Engineering: Adaptation Strategies For Real-Time OptimizationCarloyos HoyosNo ratings yet
- 9-2010 Gebreslassie - Opti (Super, Cost-Amb, 1) PDFDocument14 pages9-2010 Gebreslassie - Opti (Super, Cost-Amb, 1) PDFCarloyos HoyosNo ratings yet
- Kaplan1994 - Absorption Equation Pag. 8Document21 pagesKaplan1994 - Absorption Equation Pag. 8Carloyos HoyosNo ratings yet
- Fragrance Mixture Perception Models: A ComparisonDocument17 pagesFragrance Mixture Perception Models: A ComparisonCarloyos HoyosNo ratings yet
- Symbolic Integration of Logic in Mixed-Integer Linear Programming Techniques For Process SynthesisDocument19 pagesSymbolic Integration of Logic in Mixed-Integer Linear Programming Techniques For Process SynthesisCarloyos HoyosNo ratings yet
- Formula PsatDocument8 pagesFormula PsatCarloyos HoyosNo ratings yet
- Relative Humidity: Climent Ramis, Romualdo Romero and Sergio AlonsoDocument19 pagesRelative Humidity: Climent Ramis, Romualdo Romero and Sergio AlonsoSandeep MishraNo ratings yet
- Mathematical Modeling of Transient Heat and Mass Transport in A Baking BiscuitDocument16 pagesMathematical Modeling of Transient Heat and Mass Transport in A Baking BiscuitCarloyos HoyosNo ratings yet
- 2002 - Modelling Heat and Mass Transfer During The Continuous Baking of BiscuitsDocument11 pages2002 - Modelling Heat and Mass Transfer During The Continuous Baking of BiscuitsCarloyos HoyosNo ratings yet
- LENG 1104-22 English 4 2014-1 - Program PDFDocument5 pagesLENG 1104-22 English 4 2014-1 - Program PDFCarloyos HoyosNo ratings yet
- 1 Catalytic Carbon Dioxide HydrogenationDocument11 pages1 Catalytic Carbon Dioxide HydrogenationCarloyos HoyosNo ratings yet
- Datasheet Tic116dDocument6 pagesDatasheet Tic116dJ Andres CMNo ratings yet
- HCVR 5208a 5216aDocument1 pageHCVR 5208a 5216ajamesdd10No ratings yet
- Word Processing Fundamentals ExplainedDocument12 pagesWord Processing Fundamentals ExplainedQueven James EleminoNo ratings yet
- Digital Testing of High Voltage Circuit Breaker: S. B. Patil College of Engineering, IndapurDocument42 pagesDigital Testing of High Voltage Circuit Breaker: S. B. Patil College of Engineering, IndapurPrathamesh SheteNo ratings yet
- LS2208 Datasheet PDFDocument2 pagesLS2208 Datasheet PDFPop-Coman SimionNo ratings yet
- System Documentation For Malaysia GSTDocument10 pagesSystem Documentation For Malaysia GSTviru2allNo ratings yet
- Programming Languages ERDDocument1 pageProgramming Languages ERDkosaialbonniNo ratings yet
- DBS201: Entity Relationship DiagramDocument17 pagesDBS201: Entity Relationship Diagramtoxic_angel_love958No ratings yet
- Modelling in Hydrogeology PDFDocument260 pagesModelling in Hydrogeology PDFAnonymous LsTEoBoTKNo ratings yet
- Samsung XE700 5 - BA41-01714A 01715A 01716ADocument1 pageSamsung XE700 5 - BA41-01714A 01715A 01716AJaelaniNo ratings yet
- Vita Template PDFDocument2 pagesVita Template PDFMoath AlhajiriNo ratings yet
- Samsung 32K5500 Manual Usuario PDFDocument60 pagesSamsung 32K5500 Manual Usuario PDFAlberto de la FuenteNo ratings yet
- TE30 Data Sheet en 2016-03Document4 pagesTE30 Data Sheet en 2016-03Christian AguirreNo ratings yet
- Backlog (PH) Disabled (JR - Asst)Document15 pagesBacklog (PH) Disabled (JR - Asst)Ram Charan VeluruNo ratings yet
- LTO and CPR ProcessingDocument2 pagesLTO and CPR Processingverkie100% (9)
- SSH Key Generation ReferenceDocument6 pagesSSH Key Generation ReferenceBabjee ReddyNo ratings yet
- Anr 7.2.6 (70266108) 20190920 161250Document8 pagesAnr 7.2.6 (70266108) 20190920 161250Mega NadarNo ratings yet
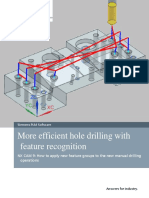
- Manual Drilling OperationDocument13 pagesManual Drilling OperationnaninoNo ratings yet
- Hyperion Strategy and RoadmapDocument48 pagesHyperion Strategy and RoadmapSamrat MitraNo ratings yet
- EBS - How To Interpret A BAI2 FileDocument3 pagesEBS - How To Interpret A BAI2 FileCoolAjNo ratings yet
- Daniel Jakobsen CV PDFDocument1 pageDaniel Jakobsen CV PDFAnonymous 2IzxlrNo ratings yet
- LLVM Crash CourseDocument15 pagesLLVM Crash CourseLauren HuangNo ratings yet
- A Chaos-based Complex Micro-Instruction Set for Mitigating Instruction Reverse EngineeringDocument14 pagesA Chaos-based Complex Micro-Instruction Set for Mitigating Instruction Reverse EngineeringMesbahNo ratings yet
- HTTP Boot Console LogDocument31 pagesHTTP Boot Console Logdhiraj.testingNo ratings yet
- Deleted FilesDocument262 pagesDeleted FilesDimarco IvanNo ratings yet
- Spse01546 S 1050 - enDocument232 pagesSpse01546 S 1050 - engocoolonNo ratings yet