You might also like
- SumarioAssistente AdministrativoDocument2 pagesSumarioAssistente AdministrativoDaniel Coutinho de MouraNo ratings yet
- Trabalho de AdministraçãoDocument2 pagesTrabalho de AdministraçãoDaniel Coutinho de MouraNo ratings yet
- Adm MCDocument2 pagesAdm MCDaniel Coutinho de MouraNo ratings yet
- Análise MSA método média-amplitudeDocument3 pagesAnálise MSA método média-amplitudeDaniel Coutinho de MouraNo ratings yet
- PatrimonioDocument8 pagesPatrimonioTatiane Souza100% (1)
- RespostasDocument1 pageRespostasDaniel Coutinho de MouraNo ratings yet
- Curso WorkflowDocument64 pagesCurso Workflowthiarllisb100% (2)
- Guia Pratico Manual de Redacao PDFDocument14 pagesGuia Pratico Manual de Redacao PDFCOLEGIOCIPNo ratings yet
- Teoria dos NúmerosDocument139 pagesTeoria dos NúmerosCristiane100% (1)
- Está A Brincar, Sr. Feynman! - Richard P. FeynmanDocument281 pagesEstá A Brincar, Sr. Feynman! - Richard P. FeynmanbaixarlivrosnoscribNo ratings yet
- Benner - Configuração de Segurança para Usuários Não AdministradoresDocument5 pagesBenner - Configuração de Segurança para Usuários Não Administradoresclauber_cNo ratings yet
- Justificativa de frequência em atéDocument1 pageJustificativa de frequência em atéMentor1987No ratings yet
- Análise de Regressão QuadráticaDocument6 pagesAnálise de Regressão QuadráticaRaniéri Mansur Plain0% (1)
- Como criar formato personalizado no AutoCADDocument8 pagesComo criar formato personalizado no AutoCADLotharSchmidtNo ratings yet
- Desligar CapsDocument7 pagesDesligar CapsDiscípulo Paulo HenriqueNo ratings yet
- Criptoativos Dados Abertos 03112022Document90 pagesCriptoativos Dados Abertos 03112022Rodrix DigitalNo ratings yet
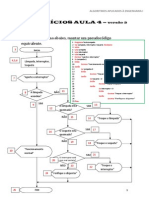
- Exercicios Pseudocodigo e Fluxograma Aula 4 v3 GabaritoDocument7 pagesExercicios Pseudocodigo e Fluxograma Aula 4 v3 GabaritoRonaldo RoqueNo ratings yet
- 3G No LinuxDocument6 pages3G No Linuxanderson_alexxNo ratings yet
- Modelo Curriculo para Alunos - CópiaDocument2 pagesModelo Curriculo para Alunos - CópiawilliamtgaNo ratings yet
- Integral DefinidaDocument5 pagesIntegral Definidafernando meloNo ratings yet
- Leilão de máquinas e equipamentos para indústria calçadistaDocument12 pagesLeilão de máquinas e equipamentos para indústria calçadistaAnonymous 588rrrwZNo ratings yet
- Análise Global Do Programa de Prevenção de Riscos Ambientais2Document10 pagesAnálise Global Do Programa de Prevenção de Riscos Ambientais2arlenemoreira50% (2)
- Resumo - 719100 Luis Telles - 28593405 Raciocinio Logico Certo e Errado Aula 19 Equivalencias III PDFDocument3 pagesResumo - 719100 Luis Telles - 28593405 Raciocinio Logico Certo e Errado Aula 19 Equivalencias III PDFElvis José100% (1)
- HardwareDocument10 pagesHardwareademaralveNo ratings yet
- Protocolo de Transporte Simples (STP) para entrega de cartas entre famílias em um planetaDocument5 pagesProtocolo de Transporte Simples (STP) para entrega de cartas entre famílias em um planetaAna Paula Simiqueli100% (1)
- RPC - Código em Linguagem CDocument5 pagesRPC - Código em Linguagem CAlessandroNo ratings yet
- SR110162 - Carga 094 Remap Light - Casamento Mercedessprinter Processador L52H PDFDocument13 pagesSR110162 - Carga 094 Remap Light - Casamento Mercedessprinter Processador L52H PDFSimone G. GoularteNo ratings yet
- Manual de Layout TXT-NF-e v4.0.0Document16 pagesManual de Layout TXT-NF-e v4.0.0danilojdsNo ratings yet
- AclsDocument3 pagesAclsAndré Camargos VazNo ratings yet
- SAVAM - Upload 3.0.0 - SpedDocument2 pagesSAVAM - Upload 3.0.0 - Spedfabiofiorani.sNo ratings yet
- Compiladores ProvaDocument11 pagesCompiladores ProvaDavi B.C.No ratings yet
- Introdução a um Sistema OperativoDocument3 pagesIntrodução a um Sistema OperativoHugo AmaralNo ratings yet
- Apostila Matemática Cálculo CEFET Capítulo 04 DerivadasDocument50 pagesApostila Matemática Cálculo CEFET Capítulo 04 DerivadasMatemática Mathclassy100% (1)
- Função Fork (Ubuntu)Document6 pagesFunção Fork (Ubuntu)Raphael FreitasNo ratings yet
- Baixar Arquivos SWFDocument2 pagesBaixar Arquivos SWFRogerio VilelaNo ratings yet