You might also like
- Manual PLC 1200 SiemensDocument18 pagesManual PLC 1200 SiemensHelen Cárdenas Honores100% (1)
- Manual Módulo I - Sub II REALIZA MANTO. A SISTEMAS ELECTRICOS Y ELECTRONICOS - 2013-1 Version 2 C PDFDocument148 pagesManual Módulo I - Sub II REALIZA MANTO. A SISTEMAS ELECTRICOS Y ELECTRONICOS - 2013-1 Version 2 C PDFCarlos Ivan Lira DiazNo ratings yet
- Montaje y puesta en marcha de sistemas robóticos y sistemas de visión, en bienes de equipo y maquinaria industrial. FMEE0208From EverandMontaje y puesta en marcha de sistemas robóticos y sistemas de visión, en bienes de equipo y maquinaria industrial. FMEE0208Rating: 3 out of 5 stars3/5 (1)
- Portafolio de AutomatizaciónDocument58 pagesPortafolio de AutomatizaciónYonathan Salazar FerrufinoNo ratings yet
- Electrronica BasicaDocument333 pagesElectrronica BasicaThe Last TimesNo ratings yet
- Seccion 060 - Puesta A Tierra y Enlace EquipotencialDocument38 pagesSeccion 060 - Puesta A Tierra y Enlace EquipotencialRoxana Karin Llontop CaicedoNo ratings yet
- Tipos de Mantenimiento IndustrialDocument2 pagesTipos de Mantenimiento IndustrialLibreria Orellana100% (1)
- Teoria Leyes ElectricidadDocument12 pagesTeoria Leyes ElectricidadgerardoNo ratings yet
- Curso de Seguridad e Higiene PDFDocument115 pagesCurso de Seguridad e Higiene PDFMartha Cecilia BeltranNo ratings yet
- Manual de Prácticas Módulo 1 Subm. 2Document56 pagesManual de Prácticas Módulo 1 Subm. 2José Zapata100% (1)
- Accionamientos para Motores de C.ADocument25 pagesAccionamientos para Motores de C.AanonixmenNo ratings yet
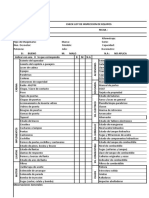
- Formato de Check ListDocument4 pagesFormato de Check ListAmérico Hernández MendozaNo ratings yet
- Controles Eléctricos - Manual de Prácticas 2021Document71 pagesControles Eléctricos - Manual de Prácticas 2021dali mojicaNo ratings yet
- Principios de La AutomatizaciónDocument18 pagesPrincipios de La AutomatizaciónFabian PobletNo ratings yet
- Examen de PLC Unidad 1 RelevaciónDocument2 pagesExamen de PLC Unidad 1 RelevaciónAngel NgNo ratings yet
- Señal AnalogicaDocument5 pagesSeñal AnalogicaWendyCondorcetJimenez100% (1)
- Acondicionadores de Señal PDFDocument58 pagesAcondicionadores de Señal PDFSthefaniia Garzon OliiverosNo ratings yet
- Perspectivas en Acuicultura (Nivel Mundial, Regional y Local)Document99 pagesPerspectivas en Acuicultura (Nivel Mundial, Regional y Local)Ing MEMBRANASNo ratings yet
- Estudio de Suelos - La TinguiñaDocument56 pagesEstudio de Suelos - La TinguiñaPatricia CahuanaNo ratings yet
- Sistemas Automaticos 2 - Balotario Examen SustitutorioDocument9 pagesSistemas Automaticos 2 - Balotario Examen Sustitutorioacajahuaringa100% (1)
- 14 ENERO Mantenimiento y Reparación de Motores y Generadores EléctricosDocument49 pages14 ENERO Mantenimiento y Reparación de Motores y Generadores Eléctricosdaniel alejoNo ratings yet
- Prácticas Automatizacion Industrial PDFDocument42 pagesPrácticas Automatizacion Industrial PDFTomas LosadaNo ratings yet
- Universidad Tecnológica de Puebla. Control Lógico Programable Manual de AsignaturaDocument162 pagesUniversidad Tecnológica de Puebla. Control Lógico Programable Manual de AsignaturaJ. S.No ratings yet
- 7 - T. 7 Electrónica de Potencia Sin SubrayarDocument26 pages7 - T. 7 Electrónica de Potencia Sin SubrayarJosé Luis Rodríguez GuerreroNo ratings yet
- InformeDocument19 pagesInformeJunior BautistaNo ratings yet
- Practica PLCDocument12 pagesPractica PLCRODRIGO SUAREZNo ratings yet
- LogoDocument235 pagesLogorampacas9214100% (3)
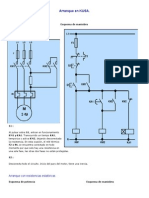
- Arranque en KUSADocument3 pagesArranque en KUSAReyner Loza0% (1)
- Fallas de PLC PDFDocument1 pageFallas de PLC PDFedwinmenaNo ratings yet
- Simulación Del Proceso en FluidSIMDocument11 pagesSimulación Del Proceso en FluidSIMSunmin WoonNo ratings yet
- Grafcet Neumatica Paso A PasoDocument76 pagesGrafcet Neumatica Paso A Pasojjurado183No ratings yet
- Secuencia Didáctica Mide e Interpreta Variables 1Document21 pagesSecuencia Didáctica Mide e Interpreta Variables 1Mario Alberto Caballero Vega100% (1)
- Instrucciones Basicas Rs Logix 500Document14 pagesInstrucciones Basicas Rs Logix 500Osbaldo ContrerasNo ratings yet
- Neumatica e HidraulicaDocument18 pagesNeumatica e HidraulicaJessicat BorchardtNo ratings yet
- ElectroneumaticaDocument5 pagesElectroneumaticaLuis Miguel BarrenoNo ratings yet
- Tarea Rele ProgramableDocument20 pagesTarea Rele ProgramableIvan HernandezNo ratings yet
- GUÍA DIDÁCTICA Máquinas EléctricasDocument42 pagesGUÍA DIDÁCTICA Máquinas EléctricasRICHARD MAYORGA CHAVEZNo ratings yet
- Trabajo Practico de Automatizacion IndustrialDocument22 pagesTrabajo Practico de Automatizacion IndustrialFreddy Espejo100% (1)
- infoPLC Net Guia 3 Instrucciones Basicas en Los Automatas ProgramablesDocument19 pagesinfoPLC Net Guia 3 Instrucciones Basicas en Los Automatas Programablesfuente perezNo ratings yet
- Circuito 555Document11 pagesCircuito 555Emmanuel PastorNo ratings yet
- Syllabus AutomatismosDocument7 pagesSyllabus AutomatismosJhon Fredy MartinNo ratings yet
- 1ºgs Ari Prog Senh 21 22Document38 pages1ºgs Ari Prog Senh 21 22Alejandra Ana Morera BarriosNo ratings yet
- Semana 10 Medidores de EnergiaDocument56 pagesSemana 10 Medidores de EnergiaChristian Guillmar Huanca OscoNo ratings yet
- Trabajo de Laboratorio de Electroneumatica-10 Practicas, ModificadoDocument46 pagesTrabajo de Laboratorio de Electroneumatica-10 Practicas, ModificadoWalter Jesus100% (1)
- ¿Qué Es Un Lenguaje de Descripción de Hardware (HDL), Una GAL y y Un FPGA?Document5 pages¿Qué Es Un Lenguaje de Descripción de Hardware (HDL), Una GAL y y Un FPGA?Edgar ManríquezNo ratings yet
- Cuestionario PLC COMPACT FESTODocument2 pagesCuestionario PLC COMPACT FESTOAdrianNo ratings yet
- Laboratorio 6 de Electronica Digital IDocument3 pagesLaboratorio 6 de Electronica Digital IVic VigaNo ratings yet
- Instrumentación Industrial - IntroducciónDocument18 pagesInstrumentación Industrial - Introducciónsantiago barrionuevoNo ratings yet
- Desarrollo de Una Practica de Laboratorio para Sistemas Scada Utilizando OpcDocument91 pagesDesarrollo de Una Practica de Laboratorio para Sistemas Scada Utilizando Opcjavier sampayoNo ratings yet
- Cuestionario PLCDocument1 pageCuestionario PLCAlbert CarlosNo ratings yet
- Puertas LogicasDocument33 pagesPuertas Logicaspunkrocker521No ratings yet
- Manual de Ejercicios Resueltos de PLC para Que El Prosor No Me Envie A VeranoDocument13 pagesManual de Ejercicios Resueltos de PLC para Que El Prosor No Me Envie A VeranoEleazar CosmeNo ratings yet
- Comunicación ParalelaDocument2 pagesComunicación ParalelaKarina Valencia50% (2)
- Elaboracion de Un Proyecto NeumaticoDocument11 pagesElaboracion de Un Proyecto NeumaticoGuadalupe Cocoletzi100% (1)
- Guias Labs AUTOMATIZACION PDFDocument126 pagesGuias Labs AUTOMATIZACION PDFCristhian JayaNo ratings yet
- Diodo Marcha LibreDocument3 pagesDiodo Marcha LibreJuan Ramon Chavez LopezNo ratings yet
- Temporizadores y ContadoresDocument9 pagesTemporizadores y ContadoresEnrique Corcino BarrialNo ratings yet
- Instrumentacion Practica 6Document10 pagesInstrumentacion Practica 6nicky nolivos100% (1)
- Simbologia Electrica NormalizadaDocument7 pagesSimbologia Electrica NormalizadaOscar Pardo PardoNo ratings yet
- Reporte SensoresDocument11 pagesReporte SensoresDiego de la CruzNo ratings yet
- Sensores Marco TeóricoDocument18 pagesSensores Marco TeóricoIndustrial act0% (1)
- U1 Sistemas Programables PDFDocument21 pagesU1 Sistemas Programables PDFsicarugirlNo ratings yet
- Detectores Sistema de BarreraDocument9 pagesDetectores Sistema de BarreraPedro MoyaNo ratings yet
- Apuntes de Sensores y TransductoresDocument20 pagesApuntes de Sensores y TransductoresOscar CazaresNo ratings yet
- Orden Del DíaDocument3 pagesOrden Del DíaFrank Moises Hidalgo GarciaNo ratings yet
- Primer Examen Parcial de Poo 2022Document2 pagesPrimer Examen Parcial de Poo 2022Benjamin LopezNo ratings yet
- Matriz - MortalidadDocument1 pageMatriz - MortalidadPercy ChiaraNo ratings yet
- Vilca Zela JorgeDocument1 pageVilca Zela JorgeAbedNo ratings yet
- Introducción A Los Métodos Del Análisis de Redes Sociales.Document3 pagesIntroducción A Los Métodos Del Análisis de Redes Sociales.Sebastian Valbuena0% (1)
- Cortacero A 5090Document1 pageCortacero A 5090Jairo Antonio Ruiz JimenezNo ratings yet
- TipografíasDocument3 pagesTipografíasMarcelo Torres100% (1)
- Proyecto Caja de Cambios ColinealDocument11 pagesProyecto Caja de Cambios ColinealTavo CoaquiraNo ratings yet
- Metrados Estructura de Represa y Canal de ConduccionDocument18 pagesMetrados Estructura de Represa y Canal de ConduccionRobins S. SimónNo ratings yet
- Anexo C Rev 1-SignedDocument3 pagesAnexo C Rev 1-SignedTorreblanca CruzNo ratings yet
- Protocolo de Liberacion MamparasDocument2 pagesProtocolo de Liberacion MamparasCArloz Rosadio CabelloNo ratings yet
- Sin TítuloDocument2 pagesSin TítuloKarla BastidasNo ratings yet
- Manual Usuario RegistradorDocument59 pagesManual Usuario Registradorruth evelin ccorisapra100% (1)
- Unidad 5 Tolerancias AcumuladasDocument10 pagesUnidad 5 Tolerancias AcumuladasJuan Pablo Irigoyen BeltranNo ratings yet
- El Lenguaje Como Facultad HumanaDocument3 pagesEl Lenguaje Como Facultad HumanaAngel FerrerNo ratings yet
- Análisis Espectral010000Document6 pagesAnálisis Espectral010000alonsold1993No ratings yet
- Catalogo CoelDocument19 pagesCatalogo CoelINGENIERIA MECANICA Y DE CONTROLNo ratings yet
- Philip CrosbyDocument31 pagesPhilip CrosbyWilliamRoldanUsquianoNo ratings yet
- Coherencia y Cohesión TextualDocument3 pagesCoherencia y Cohesión TextualAlejandro Andrés Rojas GonzálezNo ratings yet
- Como Burlar El Bloqueo CantvDocument15 pagesComo Burlar El Bloqueo Cantvdrw_21No ratings yet
- Paralelo Cinemática CNC Investigación Del Sistema 3PRSDocument6 pagesParalelo Cinemática CNC Investigación Del Sistema 3PRSAlicia VizaNo ratings yet
- Diseño Grupo 1 Final P 54 MpletoDocument3 pagesDiseño Grupo 1 Final P 54 MpletoHugo PatricioNo ratings yet
- Metodo Del Modulo de Fineza de La CombinacionDocument17 pagesMetodo Del Modulo de Fineza de La CombinacionYomira Quispe FelicesNo ratings yet
- Tercer Trabajo de Análsis IIIDocument25 pagesTercer Trabajo de Análsis IIIVanperci Ivan Xtz100% (1)
- Manual de Normas y Procedimientos para Ingreso o Ascenso en La SVCOTDocument16 pagesManual de Normas y Procedimientos para Ingreso o Ascenso en La SVCOTSimon ChangNo ratings yet
- Camal MunicipalDocument34 pagesCamal MunicipalLuis Alberto Aramburu AlvaroNo ratings yet