You might also like
- Power Reduction Through RTL Clock GatingDocument10 pagesPower Reduction Through RTL Clock GatingAishwarya TekkalakotaNo ratings yet
- Low Power Vlsi Design: Assignment-1 G Abhishek Kumar Reddy, M Manoj VarmaDocument17 pagesLow Power Vlsi Design: Assignment-1 G Abhishek Kumar Reddy, M Manoj VarmamanojNo ratings yet
- Microsoft PowerPoint - SoC Design Flow Tools CodesignDocument110 pagesMicrosoft PowerPoint - SoC Design Flow Tools CodesignRathan NNo ratings yet
- Lecture 2 - ARM Instruction SetDocument42 pagesLecture 2 - ARM Instruction SetSuhaib AbugderaNo ratings yet
- Android GraphicsDocument58 pagesAndroid GraphicsMohaimin MokhlisNo ratings yet
- Computer ArchitectureDocument104 pagesComputer ArchitectureapuurvaNo ratings yet
- Model Connectivity RAK PresentationDocument31 pagesModel Connectivity RAK PresentationHien HaNo ratings yet
- Advanced Asic Chip SynthesisDocument126 pagesAdvanced Asic Chip SynthesispravinNo ratings yet
- ESARM Unit-III and IV Slides MergedDocument301 pagesESARM Unit-III and IV Slides MergedShashipreetham LakkakulaNo ratings yet
- 1.FPGA Design Flow Processes PropertiesDocument5 pages1.FPGA Design Flow Processes Propertiesmachnik1486624No ratings yet
- New Cortex-R Processors For Lte and 4g Mobile BasebandDocument6 pagesNew Cortex-R Processors For Lte and 4g Mobile BasebandSaiteja ReddyNo ratings yet
- Cortex R4 White PaperDocument20 pagesCortex R4 White PaperRAJARAMNo ratings yet
- Modified Dual-Coupled Linear Congruential Generator Based Pseudorandom Bit GeneratorDocument11 pagesModified Dual-Coupled Linear Congruential Generator Based Pseudorandom Bit GeneratorGanesamoorthy BNo ratings yet
- GIC v3 ArchitectureDocument38 pagesGIC v3 ArchitectureAnjaliNo ratings yet
- Asic Design Cadence DR D Gracia Nirmala RaniDocument291 pagesAsic Design Cadence DR D Gracia Nirmala RaniAdline RiniNo ratings yet
- FPGA Applications in SpaceDocument5 pagesFPGA Applications in SpacePiyush JainNo ratings yet
- Android ArchitectureDocument106 pagesAndroid ArchitectureAsad Butt100% (1)
- Expanding The Synopsys Primetime Solution With Power AnalysisDocument7 pagesExpanding The Synopsys Primetime Solution With Power AnalysisRamakrishnaRao SoogooriNo ratings yet
- Building Better IP With RTL Architect NoC IP Physical Exploration by ArterisDocument30 pagesBuilding Better IP With RTL Architect NoC IP Physical Exploration by Arterisyang huNo ratings yet
- Product How To Fully Utilize TSMC S 28HPC ProcessDocument8 pagesProduct How To Fully Utilize TSMC S 28HPC ProcessvpsampathNo ratings yet
- Verification TutorialDocument14 pagesVerification TutorialAdemar Gregoruti JuniorNo ratings yet
- pg055 Axi Bridge Pcie PDFDocument117 pagespg055 Axi Bridge Pcie PDFattilismNo ratings yet
- VAMSI Kumar SRAMfinalDocument28 pagesVAMSI Kumar SRAMfinalraghuippiliNo ratings yet
- Io MultiplexingDocument19 pagesIo Multiplexingsubramanyam62No ratings yet
- RNM Simulation V3Document50 pagesRNM Simulation V3Hien HaNo ratings yet
- Nvme Pcie SSD M.2 ManualDocument56 pagesNvme Pcie SSD M.2 ManualDummy BearNo ratings yet
- VHDL Bram BromDocument9 pagesVHDL Bram BromGmit MandyaNo ratings yet
- VHDL Coding Tips and TricksDocument209 pagesVHDL Coding Tips and TricksvinutaNo ratings yet
- Lab 1Document4 pagesLab 1sharmanator99No ratings yet
- Approaches For Power Management Verification of SoC Having Dynamic Power and Voltage SwitchingDocument30 pagesApproaches For Power Management Verification of SoC Having Dynamic Power and Voltage SwitchingNageshwar ReddyNo ratings yet
- Product OverviewDocument9 pagesProduct OverviewUsha KrishnaNo ratings yet
- ARM 1176-JZFS CPU-Based Low-Power SubsystemDocument24 pagesARM 1176-JZFS CPU-Based Low-Power SubsystemJadir Eduardo Souza LucasNo ratings yet
- Development of FPGA Based Smart Controller For Speed Control of BLDC MotorDocument7 pagesDevelopment of FPGA Based Smart Controller For Speed Control of BLDC MotorInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- RTL Design Verification Engineer in Austin TX Resume Sumaira KhowajaDocument3 pagesRTL Design Verification Engineer in Austin TX Resume Sumaira KhowajaSumairaKhowaja3No ratings yet
- QRC Extraction DsDocument5 pagesQRC Extraction DsLakshman YandapalliNo ratings yet
- Zynq 7020Document4 pagesZynq 7020NGUYỄN HOÀNG LINHNo ratings yet
- System On Chip PresentationDocument70 pagesSystem On Chip Presentationshree_rs81No ratings yet
- ARM ArchitectureDocument6 pagesARM ArchitectureCarlos AraujoNo ratings yet
- Clock GatingDocument10 pagesClock Gatingpavanmk2501No ratings yet
- Primetime: Golden Timing Signoff Solution and EnvironmentDocument7 pagesPrimetime: Golden Timing Signoff Solution and Environmentsubrahmanya_rao_1No ratings yet
- Lal Usb Interface Vlsi 2010Document22 pagesLal Usb Interface Vlsi 2010Ygb RedaNo ratings yet
- Introduction To System On ChipDocument110 pagesIntroduction To System On ChipKiệt PhạmNo ratings yet
- Wipro System On ChipDocument11 pagesWipro System On Chipprodip7No ratings yet
- 04 14 LTSSM Implementation at 5GTs and Beyond PDFDocument18 pages04 14 LTSSM Implementation at 5GTs and Beyond PDFHardik TrivediNo ratings yet
- TCL 3 2015.00 LG 02Document10 pagesTCL 3 2015.00 LG 02kehrenNo ratings yet
- Sram Part1Document36 pagesSram Part1api-285860375No ratings yet
- Resume Arvind ShrivastavaDocument2 pagesResume Arvind ShrivastavaArvind ShrivastavaNo ratings yet
- Unit 7Document54 pagesUnit 7Pavankumar GorpuniNo ratings yet
- Haps-54 March2009 ManualDocument74 pagesHaps-54 March2009 Manualjohn92691No ratings yet
- Serial Peripheral InterfaceDocument5 pagesSerial Peripheral InterfaceabhinavbitNo ratings yet
- Assessment of Cache Coherence ProtocolsDocument195 pagesAssessment of Cache Coherence Protocolscharity_iitm100% (1)
- Nitro Soc DatasheetDocument5 pagesNitro Soc DatasheetAshwani MishraNo ratings yet
- Calibre Perc Ds PDFDocument2 pagesCalibre Perc Ds PDFashwini32No ratings yet
- Low Power VLSI Design: Abdulla K PDocument30 pagesLow Power VLSI Design: Abdulla K PVijay KumarNo ratings yet
- Efficient Methods For Analog Mixed Signal Verification - Interface Handling Methods, Trade-Offs and Guidelines PDFDocument38 pagesEfficient Methods For Analog Mixed Signal Verification - Interface Handling Methods, Trade-Offs and Guidelines PDFTitan FredNo ratings yet
- Cadence Virtuoso Spectre - Virtuoso - MmsimDocument12 pagesCadence Virtuoso Spectre - Virtuoso - MmsimParker333No ratings yet
- Atcd Unit 1Document58 pagesAtcd Unit 1Sudhir Kumar SinghNo ratings yet
- STM 32 L 010 F 4Document91 pagesSTM 32 L 010 F 4Muhammad FanriadoNo ratings yet
- Integrated Circuit: Types of Integrated CircuitsDocument4 pagesIntegrated Circuit: Types of Integrated Circuitssurafel TarikuNo ratings yet
- Computer OrganizationDocument1 pageComputer OrganizationSTAN 220No ratings yet
- Test SocDocument133 pagesTest SocjeevithaNo ratings yet
- EET 319 Programmable Logic ControllersDocument45 pagesEET 319 Programmable Logic ControllersIan SpacekNo ratings yet
- Samsung Confidential: Chip Set: CpuDocument60 pagesSamsung Confidential: Chip Set: CpuEdgardo CrespoNo ratings yet
- Microprocessor Module-5 Question AnswersDocument8 pagesMicroprocessor Module-5 Question AnswersShubham BargeNo ratings yet
- Primetime PX BriefDocument2 pagesPrimetime PX BriefSharanya LakshminarayananNo ratings yet
- Hardware Recommendations For HadoopDocument12 pagesHardware Recommendations For HadoopTan ArmanNo ratings yet
- Acer Aspire 1700 1604 LCDocument120 pagesAcer Aspire 1700 1604 LCalexgrtNo ratings yet
- Flash Loader Utility For The Z8 Encore! XP MCU: Application NoteDocument18 pagesFlash Loader Utility For The Z8 Encore! XP MCU: Application NoteAlexandra Sequeira SequeiraNo ratings yet
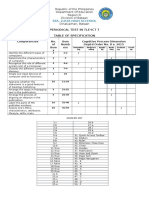
- Periodical Test in Tle-Ict 7 Table of Specification: Sta. Lucia High ScchoolDocument4 pagesPeriodical Test in Tle-Ict 7 Table of Specification: Sta. Lucia High ScchoolEileen Joy Noceda100% (1)
- MOSFET IntroductionDocument65 pagesMOSFET IntroductionAnanyaNo ratings yet
- Internal Structure: Metal Oxide Semiconductor Field Effect TransistorDocument11 pagesInternal Structure: Metal Oxide Semiconductor Field Effect TransistorChanaka HettiarachchiNo ratings yet
- Lab 2 Logic GatesDocument9 pagesLab 2 Logic Gatessafdarmunir070No ratings yet
- Expt No 4 HandoutDocument2 pagesExpt No 4 HandoutAKANSH AGRAWALNo ratings yet
- Computer Organizationand Architecture SyllabusDocument3 pagesComputer Organizationand Architecture SyllabuskrupeshNo ratings yet
- Exar Uarts in Rs-485 Applications: TX (RS-485 Direction Control Output)Document6 pagesExar Uarts in Rs-485 Applications: TX (RS-485 Direction Control Output)Lazar Stankovic100% (2)
- 8051 Add Sub ProgramDocument4 pages8051 Add Sub ProgramGopinathan MNo ratings yet
- Assembly LanguageDocument493 pagesAssembly LanguageOscar Said Villa Saucedo100% (3)
- X370 Xpower Gaming TitaniumDocument107 pagesX370 Xpower Gaming TitaniumcrinaNo ratings yet
- Lec 7Document41 pagesLec 7Esraa RamadanNo ratings yet
- BIOS Password GuideDocument5 pagesBIOS Password GuidebenkokoscribedNo ratings yet
- MultiBeast Features 5.1.0Document10 pagesMultiBeast Features 5.1.0Marcia AndreaNo ratings yet
- Intel Interview QuestionsDocument11 pagesIntel Interview QuestionsdumpsatNo ratings yet
- Socket CpuDocument4 pagesSocket CpuIrawanAtimKarnawinataNo ratings yet
- VHDL Code For Right Shift RegisterDocument2 pagesVHDL Code For Right Shift Registersklove123No ratings yet
- Cyclic Redundancy CheckDocument40 pagesCyclic Redundancy CheckVinnu VinniNo ratings yet
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxFrom EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxRating: 4.5 out of 5 stars4.5/5 (67)
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsFrom EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsRating: 5 out of 5 stars5/5 (1)
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionFrom EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionRating: 5 out of 5 stars5/5 (4)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsFrom EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNo ratings yet
- Microsoft Certified Azure Fundamentals Study Guide: Exam AZ-900From EverandMicrosoft Certified Azure Fundamentals Study Guide: Exam AZ-900No ratings yet
- Set Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNFrom EverandSet Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNRating: 5 out of 5 stars5/5 (1)
- Palo Alto Networks: The Ultimate Guide To Quickly Pass All The Exams And Getting Certified. Real Practice Test With Detailed Screenshots, Answers And ExplanationsFrom EverandPalo Alto Networks: The Ultimate Guide To Quickly Pass All The Exams And Getting Certified. Real Practice Test With Detailed Screenshots, Answers And ExplanationsNo ratings yet
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamFrom EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamNo ratings yet
- Cybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityFrom EverandCybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityRating: 5 out of 5 stars5/5 (2)
- Open Radio Access Network (O-RAN) Systems Architecture and DesignFrom EverandOpen Radio Access Network (O-RAN) Systems Architecture and DesignNo ratings yet
- Cybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringFrom EverandCybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringRating: 5 out of 5 stars5/5 (40)
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)From EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Rating: 4 out of 5 stars4/5 (4)
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationFrom EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationRating: 5 out of 5 stars5/5 (2)
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationFrom EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationNo ratings yet
- CISSP: 3 in 1- Beginner's Guide + Tips and Tricks + Simple and Effective Strategies to Learn About Information Systems SecurityFrom EverandCISSP: 3 in 1- Beginner's Guide + Tips and Tricks + Simple and Effective Strategies to Learn About Information Systems SecurityNo ratings yet
- CWNA Certified Wireless Network Administrator Study Guide: Exam CWNA-108From EverandCWNA Certified Wireless Network Administrator Study Guide: Exam CWNA-108No ratings yet
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamFrom EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamRating: 5 out of 5 stars5/5 (1)