You might also like
- Metodo Degli Spostamenti - RichiamiDocument8 pagesMetodo Degli Spostamenti - RichiamifollettostancoNo ratings yet
- Statica EdDocument42 pagesStatica EdHULIOSMELLANo ratings yet
- L. Cedolin - Appunti Di Lezione Su Gusci Cilindrici e Sferici - Cap. 1Document21 pagesL. Cedolin - Appunti Di Lezione Su Gusci Cilindrici e Sferici - Cap. 1Giorgio RivaNo ratings yet
- 19 - La Composizione Degli Spostamenti PDFDocument8 pages19 - La Composizione Degli Spostamenti PDFEleonora RossettiNo ratings yet
- ViscoelasticitàDocument30 pagesViscoelasticitàGiuseppe VignolaNo ratings yet
- Lezione 6 - Esempi SLU e SLEDocument43 pagesLezione 6 - Esempi SLU e SLEcinzia balcaiciNo ratings yet
- Scienza Delle Costruzioni - Prof Elio SaccoDocument112 pagesScienza Delle Costruzioni - Prof Elio SaccoMario SabatinoNo ratings yet
- Schemi NotevoliDocument7 pagesSchemi NotevoliRobertoNo ratings yet
- Esercizio Iperstatiche TorsionaliDocument6 pagesEsercizio Iperstatiche Torsionalirevenge987No ratings yet
- Centro Di TaglioDocument5 pagesCentro Di Tagliomann_68No ratings yet
- PieroPozzati-Teoria-e TecnicaDelle-Strutture-Vol-2-Sistemi-Di-Travi-Parte-Prima PDFDocument216 pagesPieroPozzati-Teoria-e TecnicaDelle-Strutture-Vol-2-Sistemi-Di-Travi-Parte-Prima PDFFrancesca Del ReNo ratings yet
- Catene CinematicheDocument6 pagesCatene CinematicheElisa ContiNo ratings yet
- Compito Svolto Scienza Delle CostruzioniDocument12 pagesCompito Svolto Scienza Delle CostruzioniSaam BeNo ratings yet
- 09-Affidabilità Del Modello Di WinklerDocument9 pages09-Affidabilità Del Modello Di WinklerFabrizio BisernaNo ratings yet
- QwertyDocument7 pagesQwertyMarco Picchi ScardaoniNo ratings yet
- Progetto Di Una Trave in C.A. Con EC2Document17 pagesProgetto Di Una Trave in C.A. Con EC2Spaike CaneNo ratings yet
- (Scienze Delle Costruzioni E Costruzioni Di Macchine) Geometria Delle Masse E Cerchio Di MohrDocument4 pages(Scienze Delle Costruzioni E Costruzioni Di Macchine) Geometria Delle Masse E Cerchio Di MohrAlberipaNo ratings yet
- 09 - Esempi - Metodo Spostamenti (A) PDFDocument7 pages09 - Esempi - Metodo Spostamenti (A) PDFDaniel VitaNo ratings yet
- 12-Travi Staticamente Indeterminate V1-1Document11 pages12-Travi Staticamente Indeterminate V1-1LeonardoMadeira11No ratings yet
- Scienza Delle CostruzioniDocument175 pagesScienza Delle CostruzioniPiergianni GhidottiNo ratings yet
- Analisi Della DeformazioneDocument32 pagesAnalisi Della DeformazioneGiuseppe GentileNo ratings yet
- Domande Teoria Anni Precedenti Con RispostaDocument8 pagesDomande Teoria Anni Precedenti Con RispostaWalter WhiteNo ratings yet
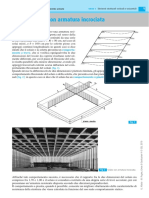
- Solai Solette Armatura Incrociata PDFDocument10 pagesSolai Solette Armatura Incrociata PDFAleksiey PellicciaNo ratings yet
- Nappi 1-06Document1 pageNappi 1-06Matteo FrassonNo ratings yet
- Scienza Delle Costruzioni 1Document52 pagesScienza Delle Costruzioni 1Jonathan Corda100% (1)
- 5 Flessione SempliceDocument21 pages5 Flessione Semplicepepo1987No ratings yet
- Metodo Degli Spostamenti - Telaio IperstaticoDocument12 pagesMetodo Degli Spostamenti - Telaio IperstaticoVincenzo SorrentinoNo ratings yet
- 1 Struttura Isostatica Travatura ReticolareDocument8 pages1 Struttura Isostatica Travatura ReticolareMattia ScafaNo ratings yet
- Lezione 16 - Calcolo Matriciale Delle StruttureDocument55 pagesLezione 16 - Calcolo Matriciale Delle StrutturepinoNo ratings yet
- Sul Concetto Di Rigidezza e Sul MetodoDocument20 pagesSul Concetto Di Rigidezza e Sul MetodoalexNo ratings yet
- Esercizi Analisi Cinematica1Document10 pagesEsercizi Analisi Cinematica1andreabag87No ratings yet
- 17-Solai Misti Legno Calcestruzzo Metodi Di VerificaDocument19 pages17-Solai Misti Legno Calcestruzzo Metodi Di Verificamich7bellNo ratings yet
- Soluzione Es 3Document21 pagesSoluzione Es 3LeonardoMadeira11No ratings yet
- 05-Cinematica TraviDocument12 pages05-Cinematica TraviMilena CiamarraNo ratings yet
- Lucia 2010 (Lezioni Di Scienza Delle Costruzioni - 02) R0.1.0Document40 pagesLucia 2010 (Lezioni Di Scienza Delle Costruzioni - 02) R0.1.0Pasquale LuciaNo ratings yet
- Esercizi Triassiali Svolti in AulaDocument4 pagesEsercizi Triassiali Svolti in Aulafermat91No ratings yet
- Esempio Esercizio Completo Velivolo A GettoDocument12 pagesEsempio Esercizio Completo Velivolo A GettoBrian AdkinsNo ratings yet
- Dispense 7 9Document63 pagesDispense 7 9Simone RutiglianoNo ratings yet
- Baricentro Di Figure ComposteDocument2 pagesBaricentro Di Figure ComposteEmanuele MeloniNo ratings yet
- 3 Rotazione Alla Corda Siracusa Aprile 2011 ColoreDocument32 pages3 Rotazione Alla Corda Siracusa Aprile 2011 Colorebosnia76No ratings yet
- 20 Lezione 18 Gusci - 492..524 PDFDocument33 pages20 Lezione 18 Gusci - 492..524 PDFElvira VallarioNo ratings yet
- Progettazione Di Un Plinto Di Fondazione in C.A PDFDocument16 pagesProgettazione Di Un Plinto Di Fondazione in C.A PDFNiccolòNo ratings yet
- Appunti Esercitazioni Guida Ansys 12Document294 pagesAppunti Esercitazioni Guida Ansys 12Emanuele ButtàNo ratings yet
- 13-Analisi ModaleDocument15 pages13-Analisi Modaleq_giovanniNo ratings yet
- Fondazioni 2Document26 pagesFondazioni 2TommasoDominatoNo ratings yet
- Caratteristiche Fisiche Meccaniche Delle TerreDocument12 pagesCaratteristiche Fisiche Meccaniche Delle TerreMassimo NastiNo ratings yet
- Esercitazioni IdraulicaDocument61 pagesEsercitazioni IdraulicagioioNo ratings yet
- Trave Su Suolo ElasticoDocument10 pagesTrave Su Suolo ElasticoPaoloGavardiNo ratings yet
- Cemento Armato 7 - Torsione (Rossi)Document36 pagesCemento Armato 7 - Torsione (Rossi)Matteo MessinaNo ratings yet
- Pressoflessione DeviataDocument74 pagesPressoflessione Deviatanicola_seph100% (1)
- SDC Parte 4 PDFDocument226 pagesSDC Parte 4 PDFElton MirakaNo ratings yet
- Linee Di Influenza 2 PDFDocument8 pagesLinee Di Influenza 2 PDFShadiNo ratings yet
- Esercizi Fondazioni SuperficialiDocument21 pagesEsercizi Fondazioni SuperficialiAndreaNo ratings yet
- Metodo Delle RigidezzeDocument18 pagesMetodo Delle RigidezzeMario RossiNo ratings yet
- Instabilità A Carico Di PuntaDocument27 pagesInstabilità A Carico Di Puntabigmarck123No ratings yet
- SC Costruz Cornetti Soluz Lez 44Document7 pagesSC Costruz Cornetti Soluz Lez 44Antonella FabrizioNo ratings yet
- 6100-6 Es.8.1.1Document8 pages6100-6 Es.8.1.1HULIOSMELLA0% (1)
- 1c1manovellismo e Glifo 13Document16 pages1c1manovellismo e Glifo 13Domenico VerbicaroNo ratings yet
- Dispense UtiliDocument61 pagesDispense UtiliAnonymous LU3Dz3TKtVNo ratings yet
- Affidabilità Pro - SapDocument1 pageAffidabilità Pro - SapSalvatore Lemon LeonidaNo ratings yet
- Scheda - FAST Agibilita Post TerremotoDocument2 pagesScheda - FAST Agibilita Post TerremotoSalvatore Lemon LeonidaNo ratings yet
- Load CapDocument31 pagesLoad CapSalvatore Lemon LeonidaNo ratings yet
- Tavola PeriodicaDocument1 pageTavola Periodicabeppes66No ratings yet
- PoloDocument1 pagePoloSalvatore Lemon LeonidaNo ratings yet