You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Build Your Home-Made 500Khz Frequency Meter!Document12 pagesBuild Your Home-Made 500Khz Frequency Meter!nagdeep58No ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Modul Kem201052 English PMR 1Document89 pagesModul Kem201052 English PMR 1Rosli Mohd100% (1)
- Advances in Critical Buckling Load Assessment For Tubular Inside WellboresDocument9 pagesAdvances in Critical Buckling Load Assessment For Tubular Inside WellboresPeaceMaker AmirahNo ratings yet
- JKR Spec 2005Document188 pagesJKR Spec 2005rex79x98% (60)
- A New Approach On Troubleshooting of Cathodic Protection - A CaseDocument5 pagesA New Approach On Troubleshooting of Cathodic Protection - A CasePeaceMaker AmirahNo ratings yet
- A Probability Model For Solid Particle Erosion in A Straight Pipe PDFDocument9 pagesA Probability Model For Solid Particle Erosion in A Straight Pipe PDFPeaceMaker AmirahNo ratings yet
- A Physical-Based Statistical Method For Modeling Ocean Wave HeightsDocument17 pagesA Physical-Based Statistical Method For Modeling Ocean Wave HeightsPeaceMaker AmirahNo ratings yet
- Flow of Oil and Sand in A Horizontal WellDocument10 pagesFlow of Oil and Sand in A Horizontal WellPeaceMaker AmirahNo ratings yet
- How Operating and Environmental Conditions Affect ErosionDocument24 pagesHow Operating and Environmental Conditions Affect ErosionPeaceMaker AmirahNo ratings yet
- Distributions of Sand Particles in Horizontal and Vertical Annular Multiphase Flow in Pipes and The Effects of Sand ErosionDocument10 pagesDistributions of Sand Particles in Horizontal and Vertical Annular Multiphase Flow in Pipes and The Effects of Sand ErosionPeaceMaker AmirahNo ratings yet
- The Little Prince PDFDocument72 pagesThe Little Prince PDFChoi Min NamNo ratings yet
- PMR Guided Writing ModuleDocument11 pagesPMR Guided Writing ModuleJeyShida100% (4)
- 3.2.4 - Design Info-Water SupplyDocument5 pages3.2.4 - Design Info-Water SupplyNyu123456No ratings yet
- Effect of Flow Velocity and Impact Angle On Erosion-Corrosion Behavior of Chromium Carbide CoatingDocument29 pagesEffect of Flow Velocity and Impact Angle On Erosion-Corrosion Behavior of Chromium Carbide CoatingPeaceMaker AmirahNo ratings yet
- Indah Water Population Equivalents (PE)Document1 pageIndah Water Population Equivalents (PE)PeaceMaker AmirahNo ratings yet
- (Time Suggested: 40 Minutes) : Section BDocument9 pages(Time Suggested: 40 Minutes) : Section BAmelia Ay100% (3)
- Conference at WISMA IEM - ReportDocument4 pagesConference at WISMA IEM - ReportPeaceMaker AmirahNo ratings yet
- 3.2.4 - Design Info-Water SupplyDocument5 pages3.2.4 - Design Info-Water SupplyNyu123456No ratings yet
- Trial Mathematics SPM Wilayah KL 2012 Paper 1+answerDocument26 pagesTrial Mathematics SPM Wilayah KL 2012 Paper 1+answerwaichunko100% (1)
- For FunDocument1 pageFor FunPeaceMaker AmirahNo ratings yet
- Oic 2015 Booklet HrsDocument24 pagesOic 2015 Booklet HrsPeaceMaker AmirahNo ratings yet
- Presentation HadanahDocument7 pagesPresentation HadanahPeaceMaker AmirahNo ratings yet
- Guidelines For Website UnitDocument9 pagesGuidelines For Website UnitPeaceMaker AmirahNo ratings yet
- Chapter 1 Intro To Academic WritingNEWDocument23 pagesChapter 1 Intro To Academic WritingNEWPeaceMaker AmirahNo ratings yet
- Chapter 1 - Managers and ManagementDocument9 pagesChapter 1 - Managers and ManagementPeaceMaker Amirah100% (1)
- Debouncing MC14490Document13 pagesDebouncing MC14490Chany ChapnikNo ratings yet
- DAE in Computer Information Technology: HoursDocument7 pagesDAE in Computer Information Technology: HoursNoumanNo ratings yet
- The Evolution of High-Speed Transceiver Technology: White PaperDocument15 pagesThe Evolution of High-Speed Transceiver Technology: White PaperRahul YadavNo ratings yet
- MC 3488Document8 pagesMC 3488d_richard_dNo ratings yet
- Analog & Digital (Microp)Document3 pagesAnalog & Digital (Microp)Bharath ChNo ratings yet
- EncoderDocument22 pagesEncoderEdson GonzalezNo ratings yet
- PIC16F872 - Data Sheet 28-Pin, 8-Bit CMOS Flash Microcontroller With 10-Bit A/D - 30221cDocument168 pagesPIC16F872 - Data Sheet 28-Pin, 8-Bit CMOS Flash Microcontroller With 10-Bit A/D - 30221cGuillermo HernandezNo ratings yet
- July - 2020: VIT Research Entrance ExaminationDocument35 pagesJuly - 2020: VIT Research Entrance ExaminationAnbumaniNo ratings yet
- Beginning FPGA Programming - Partie24Document5 pagesBeginning FPGA Programming - Partie24ali alilouNo ratings yet
- PIC16F84ADocument88 pagesPIC16F84ASantosNo ratings yet
- OPen Collector and Tri State GateDocument19 pagesOPen Collector and Tri State GateJaydip FadaduNo ratings yet
- Test 8Document38 pagesTest 8Richard RegidorNo ratings yet
- Single Relay BoardDocument4 pagesSingle Relay BoardResearchDesignLabNo ratings yet
- Digital LogicDocument6 pagesDigital LogicLittle VoiceNo ratings yet
- 16F54Document90 pages16F54SHAHID_71No ratings yet
- Pulse Width ModulationDocument10 pagesPulse Width Modulationsh_ghas6282No ratings yet
- 500-PG-8700!2!7 - Design of Space Flight Field Programmable Gate ArraysDocument34 pages500-PG-8700!2!7 - Design of Space Flight Field Programmable Gate ArraysMarkWAMSNo ratings yet
- Utest TTTL Handbook PDFDocument15 pagesUtest TTTL Handbook PDFMarcel-Philippe RütschlinNo ratings yet
- Module 2 - Basic Gates-AdeDocument53 pagesModule 2 - Basic Gates-AdeJayanth VasudevNo ratings yet
- LM - 360 PDFDocument8 pagesLM - 360 PDFDaniel Arcia JiménezNo ratings yet
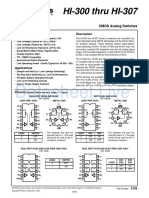
- HI-300 Thru HI-307: Datasheet - LiveDocument10 pagesHI-300 Thru HI-307: Datasheet - LiveDeybbiNo ratings yet
- Power SelguideDocument56 pagesPower SelguideFrancisco Wilson Bezerra FranciscoNo ratings yet
- 7406Document27 pages7406Ben CastoNo ratings yet
- Stgap2S: Galvanically Isolated 4 A Single Gate DriverDocument22 pagesStgap2S: Galvanically Isolated 4 A Single Gate Driverbokic88No ratings yet
- 27 C 16Document8 pages27 C 161webdomainNo ratings yet
- AU9510 USB Smart Card Reader Chip Technical Reference ManualDocument30 pagesAU9510 USB Smart Card Reader Chip Technical Reference ManualJie99No ratings yet
- Single Channel, High Speed Optocouplers: 6N135/6 HCNW135/6 HCNW4502/3 HCPL-0452/3 HCPL-0500/1 HCPL-4502/3Document3 pagesSingle Channel, High Speed Optocouplers: 6N135/6 HCNW135/6 HCNW4502/3 HCPL-0452/3 HCPL-0500/1 HCPL-4502/3Alecio SilvaNo ratings yet
- Bipolar-Junction (BJT) Transistors: NPN Transistor PNP TransistorDocument16 pagesBipolar-Junction (BJT) Transistors: NPN Transistor PNP TransistorNancyNo ratings yet
- IR RECEIVER Module PDFDocument5 pagesIR RECEIVER Module PDFshahbaz75sbNo ratings yet