You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Image ProcessingDocument49 pagesImage ProcessingJyoti SinghNo ratings yet
- The Chronology Protection ConjectureDocument4 pagesThe Chronology Protection ConjectureKrisNo ratings yet
- 37eb PDFDocument29 pages37eb PDFZikriaKMuhammadNo ratings yet
- Offshore Pipeline Hydraulic and Mechanical AnalysesDocument25 pagesOffshore Pipeline Hydraulic and Mechanical AnalysesEslam RedaNo ratings yet
- Tensile Strength of Mass Concrete 913-938 PDFDocument28 pagesTensile Strength of Mass Concrete 913-938 PDFchutton681No ratings yet
- ROCKYDocument4 pagesROCKYNelson Alexander Aponte SimbronNo ratings yet
- Direct Determination of The Flow Curves of NoDocument4 pagesDirect Determination of The Flow Curves of NoZaid HadiNo ratings yet
- Motion of Particles in FluidDocument26 pagesMotion of Particles in FluidSubakti HungNo ratings yet
- Engineering Structures: SciencedirectDocument12 pagesEngineering Structures: Sciencedirectyasemin bürüngüzNo ratings yet
- Design Guide Handbook For EN 1996 Design of Masonry StructuresDocument46 pagesDesign Guide Handbook For EN 1996 Design of Masonry Structuresbusyspider100% (1)
- SOAL ElmesDocument16 pagesSOAL ElmesNurul HanifahNo ratings yet
- Extrusion Press PDFDocument2 pagesExtrusion Press PDFRobert25% (4)
- MIT2 080JF13 Lecture2 PDFDocument26 pagesMIT2 080JF13 Lecture2 PDFAbhilashJanaNo ratings yet
- Cluster Level Question Bank (Ahmedabad & Gandhinagar Cluster)Document33 pagesCluster Level Question Bank (Ahmedabad & Gandhinagar Cluster)manpreetsingh3458417No ratings yet
- Final Cassava Grating MachineDocument7 pagesFinal Cassava Grating Machinenormelyn100% (2)
- Energy Balance Untuk Teknik KimiaDocument19 pagesEnergy Balance Untuk Teknik Kimiamelisa amaliaNo ratings yet
- Egee 101 Reflective Essay 1Document3 pagesEgee 101 Reflective Essay 1api-142590237No ratings yet
- Static Mixers for Solid-Solid MixingDocument8 pagesStatic Mixers for Solid-Solid MixingSalsa_Picante_BabyNo ratings yet
- Metodo Epa 18Document40 pagesMetodo Epa 18Luis TrejoNo ratings yet
- Ricapito-1 PbLi-T DatabaseDocument16 pagesRicapito-1 PbLi-T DatabaseSasa DjordjevicNo ratings yet
- DeoxofluorDocument2 pagesDeoxofluorleda_prandiNo ratings yet
- Chapter 2 1 - Linear EquationsDocument23 pagesChapter 2 1 - Linear Equationsapi-263209117No ratings yet
- Gyro Notes For 2ND MateDocument18 pagesGyro Notes For 2ND MateArchit Bhardwaj100% (1)
- Design Project: SEV200 - Geotechnical Investigation and Design Last Update: 09/05/2020Document12 pagesDesign Project: SEV200 - Geotechnical Investigation and Design Last Update: 09/05/2020abdulqadirghoriNo ratings yet
- Mcqs Preparation For Engineering Competitive ExamsDocument17 pagesMcqs Preparation For Engineering Competitive Examsabhishek sethiNo ratings yet
- 5th Grade 13-14 Math Common Core Standards by QuarterDocument3 pages5th Grade 13-14 Math Common Core Standards by QuartermrkballNo ratings yet
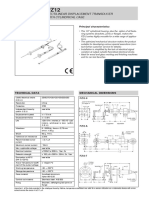
- Rectilinear Displacement Transducer With Cylindrical Case: Technical Data Mechanical DimensionsDocument2 pagesRectilinear Displacement Transducer With Cylindrical Case: Technical Data Mechanical Dimensionsl561926No ratings yet
- Introduction To XAFSDocument270 pagesIntroduction To XAFSEric William CochranNo ratings yet
- Atomic Structure and Fundamental ParticlesDocument32 pagesAtomic Structure and Fundamental ParticleshumayunbashaNo ratings yet