You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Way To Sell: Powered byDocument25 pagesThe Way To Sell: Powered bysagarsononiNo ratings yet
- Guidelines For TV Broadcast Script Writing and News CastingDocument3 pagesGuidelines For TV Broadcast Script Writing and News CastingAngel D. Liwanag0% (1)
- Operations Management Success FactorsDocument147 pagesOperations Management Success Factorsabishakekoul100% (1)
- Budokon - Mma.program 2012 13Document10 pagesBudokon - Mma.program 2012 13Emilio DiazNo ratings yet
- Basic Statistical Tools for Data Analysis and Quality EvaluationDocument45 pagesBasic Statistical Tools for Data Analysis and Quality EvaluationfarjanaNo ratings yet
- BtuDocument39 pagesBtuMel Vin100% (1)
- ABeamConsultinganyProfile enDocument16 pagesABeamConsultinganyProfile enAhmed El-OsailyNo ratings yet
- Easily Take A Pulse With A Infrared Pulse Sensor - MakeDocument8 pagesEasily Take A Pulse With A Infrared Pulse Sensor - MakeSyahril PabloNo ratings yet
- I-Teams June 2014Document123 pagesI-Teams June 2014abidalidossaNo ratings yet
- Alive in The SwampDocument40 pagesAlive in The SwamparacelideNo ratings yet
- CycomDocument2 pagesCycomNor Azliza Bte JaafarNo ratings yet
- Choose A Classifier - MATLAB & SimulinkDocument11 pagesChoose A Classifier - MATLAB & SimulinkSyahril PabloNo ratings yet
- Visual Inspection - A Review of The LiteratureDocument77 pagesVisual Inspection - A Review of The LiteratureSyahril PabloNo ratings yet
- FortiMail Log Message Reference v300Document92 pagesFortiMail Log Message Reference v300Ronald Vega VilchezNo ratings yet
- Shaft-Hub Couplings With Polygonal Profiles - Citarella-Gerbino2001Document8 pagesShaft-Hub Couplings With Polygonal Profiles - Citarella-Gerbino2001sosu_sorin3904No ratings yet
- Assignment Chemical Bonding JH Sir-4163 PDFDocument70 pagesAssignment Chemical Bonding JH Sir-4163 PDFAkhilesh AgrawalNo ratings yet
- Earth-Song WorksheetDocument2 pagesEarth-Song WorksheetMuhammad FarizNo ratings yet
- LAWHIST - Week1 - Codamon Lim Tan PDFDocument32 pagesLAWHIST - Week1 - Codamon Lim Tan PDFMargell TanNo ratings yet
- Binomial TheoremDocument57 pagesBinomial Theoremkailasbankar96No ratings yet
- Lesson Plan 3Document6 pagesLesson Plan 3api-370683519No ratings yet
- Understanding EndogeneityDocument25 pagesUnderstanding EndogeneityagustinusNo ratings yet
- Research Paper Is at DominosDocument6 pagesResearch Paper Is at Dominosssharma83No ratings yet
- Chapter 1 Notes and ReiewDocument6 pagesChapter 1 Notes and ReiewTricia Mae Comia AtienzaNo ratings yet
- De Broglie's Hypothesis: Wave-Particle DualityDocument4 pagesDe Broglie's Hypothesis: Wave-Particle DualityAvinash Singh PatelNo ratings yet
- Awareness Training On Filipino Sign Language (FSL) PDFDocument3 pagesAwareness Training On Filipino Sign Language (FSL) PDFEmerito PerezNo ratings yet
- Rangkuman Corporate GovernanceDocument21 pagesRangkuman Corporate GovernanceAlissa JanssensNo ratings yet
- Electrostatics Formulas and Numerical ProblemsDocument11 pagesElectrostatics Formulas and Numerical ProblemsManish kumar100% (2)
- Modul Kls XI Sem IDocument6 pagesModul Kls XI Sem IAnonymous WgvOpI0CNo ratings yet
- Asian Paints Research ProposalDocument1 pageAsian Paints Research ProposalYASH JOHRI-DM 21DM222No ratings yet
- Wound Healing (BOOK 71P)Document71 pagesWound Healing (BOOK 71P)Ahmed KhairyNo ratings yet
- TRU BRO 4pg-S120675R0 PDFDocument2 pagesTRU BRO 4pg-S120675R0 PDFtomNo ratings yet
- Reducing Work Related Psychological Ill Health and Sickness AbsenceDocument15 pagesReducing Work Related Psychological Ill Health and Sickness AbsenceBM2062119PDPP Pang Kuok WeiNo ratings yet
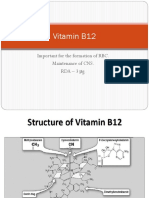
- Vitamin B12: Essential for RBC Formation and CNS MaintenanceDocument19 pagesVitamin B12: Essential for RBC Formation and CNS MaintenanceHari PrasathNo ratings yet
- New Manual of Fiber Science Revised (Tet)Document43 pagesNew Manual of Fiber Science Revised (Tet)RAZA Khn100% (1)
- Bluetooth Mobile Based College CampusDocument12 pagesBluetooth Mobile Based College CampusPruthviraj NayakNo ratings yet
- Reviews: Bariatric and Metabolic Surgery: A Shift in Eligibility and Success CriteriaDocument13 pagesReviews: Bariatric and Metabolic Surgery: A Shift in Eligibility and Success CriteriaJulia SCNo ratings yet
- Social Marketing PlanDocument25 pagesSocial Marketing PlanChristophorus HariyadiNo ratings yet