You might also like
- An Introduction to Linear Algebra and TensorsFrom EverandAn Introduction to Linear Algebra and TensorsRating: 1 out of 5 stars1/5 (1)
- cs530 12 Notes PDFDocument188 pagescs530 12 Notes PDFyohanes sinagaNo ratings yet
- Optimization Techniques: Dr. Muhammad Naeem Dr. Ashfaq AhmedDocument64 pagesOptimization Techniques: Dr. Muhammad Naeem Dr. Ashfaq AhmedMuhammad Ali Khan AwanNo ratings yet
- 10th Samacheer Kalvi Maths All Units Points To RememberDocument10 pages10th Samacheer Kalvi Maths All Units Points To RememberArvind RanganathanNo ratings yet
- Differential Calculus Made Easy by Mark HowardDocument178 pagesDifferential Calculus Made Easy by Mark HowardLeonardo DanielliNo ratings yet
- 221 HomeworkDocument45 pages221 Homeworkkevincshih100% (1)
- Vectors and MatricesDocument8 pagesVectors and MatricesdorathiNo ratings yet
- Determinants: 1 The Determinant of A 2 × 2 MatrixDocument17 pagesDeterminants: 1 The Determinant of A 2 × 2 MatrixJuan Ignacio RamirezNo ratings yet
- 1522664822LinearAlgebra 1Document5 pages1522664822LinearAlgebra 1abhishekNo ratings yet
- Vectors and MatricesDocument8 pagesVectors and MatricesdorathiNo ratings yet
- Linear AlgebraDocument37 pagesLinear AlgebraFernando BrandoNo ratings yet
- 02-Basic StructuresDocument39 pages02-Basic StructuresNguyễn Minh HoàngNo ratings yet
- Defining Linear TransformationsDocument9 pagesDefining Linear TransformationsAshvin GraceNo ratings yet
- Advanced Mathematics 1 + 2Document7 pagesAdvanced Mathematics 1 + 2phamtra241998No ratings yet
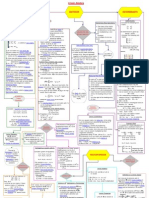
- Linear Algebra Flow Diagram 1Document1 pageLinear Algebra Flow Diagram 1stansmith1100% (1)
- Basic Structures Sets, Functions Sequences, and SumsDocument33 pagesBasic Structures Sets, Functions Sequences, and SumsNguyen Hai An (K15 HL)No ratings yet
- Basic Structures Sets, Functions Sequences, and SumsDocument34 pagesBasic Structures Sets, Functions Sequences, and SumsVũ Thái AnhNo ratings yet
- 408 NoteDocument57 pages408 Notevaibhavsingh4594No ratings yet
- Exercises Session1 PDFDocument4 pagesExercises Session1 PDFAnonymous a01mXIKLxtNo ratings yet
- Mathematical Prerequisites: 1.1 Operations On Complex NumbersDocument6 pagesMathematical Prerequisites: 1.1 Operations On Complex NumbersDennis Mads MakhandiaNo ratings yet
- Chapter 11Document3 pagesChapter 11muhammedNo ratings yet
- Cheat Sheet (Regular Font) PDFDocument4 pagesCheat Sheet (Regular Font) PDFJosh ChandyNo ratings yet
- Linear Algebra: Debashish Sharma June 5, 2014Document7 pagesLinear Algebra: Debashish Sharma June 5, 2014vknarlaNo ratings yet
- Lecture 4-Filled Out PDFDocument6 pagesLecture 4-Filled Out PDFShanay ThakkarNo ratings yet
- Homological Algebra - Problem Set 1 - SolutionsDocument9 pagesHomological Algebra - Problem Set 1 - SolutionsHectorNo ratings yet
- 5 Amt 2 Rev SolDocument7 pages5 Amt 2 Rev SolZakria ToorNo ratings yet
- O DenotesDocument69 pagesO DenotesMustafa Hikmet Bilgehan UçarNo ratings yet
- 4 Pictures of The Same Thing: Picture (I) : Systems of Linear EquationsDocument4 pages4 Pictures of The Same Thing: Picture (I) : Systems of Linear EquationsthezackattackNo ratings yet
- Linear Algebra Problems: Math 504 - 505 Jerry L. KazdanDocument54 pagesLinear Algebra Problems: Math 504 - 505 Jerry L. KazdananiezahidNo ratings yet
- Vector Spaces: All R Is X-Y Plane R Is A LineDocument6 pagesVector Spaces: All R Is X-Y Plane R Is A LineMahesh AbnaveNo ratings yet
- Det SlidesDocument17 pagesDet SlidesKrishna KulkarniNo ratings yet
- Lin Agebra RevDocument18 pagesLin Agebra RevMustafa HaiderNo ratings yet
- MATH219 Lecture 6Document9 pagesMATH219 Lecture 6Serdar BilgeNo ratings yet
- 2000 2 PDFDocument4 pages2000 2 PDFMuhammad Al KahfiNo ratings yet
- Algebraic Combinatorics - Po-Shen-Loh - MOP 2011Document5 pagesAlgebraic Combinatorics - Po-Shen-Loh - MOP 2011David DavidNo ratings yet
- 3fa2s 2012 AbrirDocument8 pages3fa2s 2012 AbrirOmaguNo ratings yet
- Imc2000 2Document4 pagesImc2000 2Arief CahyadiNo ratings yet
- Diagonal Matrices, Inverse MatrixDocument19 pagesDiagonal Matrices, Inverse MatrixindelamNo ratings yet
- Course Summary: Math 211Document18 pagesCourse Summary: Math 211David DennisNo ratings yet
- Homework1 SolutionsDocument3 pagesHomework1 SolutionsDominic LombardiNo ratings yet
- Savov NotesDocument4 pagesSavov NotesPritish PradhanNo ratings yet
- Linear Algebra in Four PagesDocument4 pagesLinear Algebra in Four Pagesphyzics100% (1)
- Maths 2 For Eng - Lesson 1Document9 pagesMaths 2 For Eng - Lesson 1Abdulkader TukaleNo ratings yet
- Linear Algebra Nut ShellDocument6 pagesLinear Algebra Nut ShellSoumen Bose100% (1)
- Gi Part1 PDFDocument57 pagesGi Part1 PDFasdfghjNo ratings yet
- WIN (2019-20) MAT1002 ETH AP2019205000028 Reference Material I Application of ODE PDFDocument177 pagesWIN (2019-20) MAT1002 ETH AP2019205000028 Reference Material I Application of ODE PDFEswar RcfNo ratings yet
- Eigenvalues of GraphsDocument29 pagesEigenvalues of GraphsDenise ParksNo ratings yet
- GEM 802 Chapter 1Document52 pagesGEM 802 Chapter 1Leah Ann ManuelNo ratings yet
- Reminding Matrices and DeterminantsDocument6 pagesReminding Matrices and DeterminantsFredrick MutungaNo ratings yet
- Linear SystemsDocument12 pagesLinear SystemsJonathan RiveraNo ratings yet
- Linear Algebra Problems: Math 504 - 505 Jerry L. KazdanDocument80 pagesLinear Algebra Problems: Math 504 - 505 Jerry L. KazdanAnonymous 8lHmQse4rNo ratings yet
- 19 Eigenvalues, Eigenvectors, Ordinary Differential Equations, and ControlDocument12 pages19 Eigenvalues, Eigenvectors, Ordinary Differential Equations, and ControljackkelthorNo ratings yet
- Rank, Inner Product and NonsingularityDocument12 pagesRank, Inner Product and NonsingularityAravindVRNo ratings yet
- Chapter 21Document6 pagesChapter 21manikannanp_ponNo ratings yet
- 18.06SC Final Exam SolutionsDocument14 pages18.06SC Final Exam SolutionsBakary KonareNo ratings yet
- Discrete Mathematics Notes - 2012Document56 pagesDiscrete Mathematics Notes - 2012yee chong 94No ratings yet
- Computer Network Homework HelpDocument12 pagesComputer Network Homework HelpComputer Network Assignment HelpNo ratings yet
- CVP LicenseDocument7 pagesCVP LicenseWaqar KhanNo ratings yet
- CEFR B1 Learning OutcomesDocument13 pagesCEFR B1 Learning OutcomesPhairouse Abdul Salam100% (1)
- English Language Paper 2 Revision Guide: Writers' Viewpoints and Perspectives 1 Hour 45 MinutesDocument30 pagesEnglish Language Paper 2 Revision Guide: Writers' Viewpoints and Perspectives 1 Hour 45 MinutesAbbas ShaikhNo ratings yet
- Practice Homework SetDocument58 pagesPractice Homework SetTro emaislivrosNo ratings yet
- Dacon Asset Integrity PresentationDocument10 pagesDacon Asset Integrity PresentationMohammed Ilyas Mohiuddin100% (1)
- Barretts Taxonomy ColourDocument2 pagesBarretts Taxonomy Colourafnan fathiNo ratings yet
- Lesson Plans For Sped 101Document3 pagesLesson Plans For Sped 101api-271266618No ratings yet
- Strut & Tie ModelDocument67 pagesStrut & Tie Modelahmed adel100% (9)
- End of Semester ReflectionDocument3 pagesEnd of Semester Reflectionapi-242745290No ratings yet
- Human Genome ProjectDocument28 pagesHuman Genome Projectمحمد بلال سرورNo ratings yet
- Group 1 Secb MDCMDocument7 pagesGroup 1 Secb MDCMPOOJA GUPTANo ratings yet
- Pathway Foundation T'SDocument113 pagesPathway Foundation T'SDo HuyenNo ratings yet
- Writing Portfolio B1 Tak 1 To 4Document2 pagesWriting Portfolio B1 Tak 1 To 4DUAIZ TORRESNo ratings yet
- Burkina Faso NigerDocument21 pagesBurkina Faso NigerAlin Cosma100% (1)
- Oracle OTL Timecard Layout CustomicationDocument138 pagesOracle OTL Timecard Layout CustomicationFoolIshNo ratings yet
- SCHLEICH - Advanced Test Technologies - GLP1-e - PE+IR+HVAC PDFDocument4 pagesSCHLEICH - Advanced Test Technologies - GLP1-e - PE+IR+HVAC PDFRakesh Kumar VermaNo ratings yet
- Seven Steps To Successful Strategic PlanningDocument4 pagesSeven Steps To Successful Strategic PlanningtaimostymosNo ratings yet
- TCS Verbal Placement QuestionsDocument5 pagesTCS Verbal Placement QuestionsNivashini100% (1)
- 04 Vaca Muerta Shale PDFDocument14 pages04 Vaca Muerta Shale PDFsanty222No ratings yet
- Ca1 Pu 12Document100 pagesCa1 Pu 12Shabbeer ZafarNo ratings yet
- Guide To Information Technology Security ServicesDocument84 pagesGuide To Information Technology Security ServicesSecurity Face to FaceNo ratings yet
- Concepts of Mind: CrystaqueousDocument51 pagesConcepts of Mind: CrystaqueousCasa GrandeNo ratings yet
- Transferring Stock and Sales Data Process SAP StandardDocument3 pagesTransferring Stock and Sales Data Process SAP StandardrksamplaNo ratings yet
- Core OmDocument25 pagesCore OmCristina SencalNo ratings yet
- Master of Business Administration - MBA Semester 3 ProjectDocument2 pagesMaster of Business Administration - MBA Semester 3 ProjectAnkur SharmaNo ratings yet
- Observation ChecklistDocument4 pagesObservation ChecklistNiketa Joseph100% (5)
- Bit DefenderDocument130 pagesBit Defendermarius_brkt6284No ratings yet
- Introduction To Philosophy of The Human Person - 2nd QuarterDocument5 pagesIntroduction To Philosophy of The Human Person - 2nd Quarternamjoonsfluff100% (1)
- Active CitizenshipDocument2 pagesActive CitizenshiprachidNo ratings yet
- Application LetterDocument8 pagesApplication LetterProbiotik Organik PalembangNo ratings yet