You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Lexium 32 & Motors - VW3M5103R30Document2 pagesLexium 32 & Motors - VW3M5103R30Anita IonelaNo ratings yet
- XVBC33: Product Data SheetDocument4 pagesXVBC33: Product Data SheetAnita IonelaNo ratings yet
- Lexium 32 & Motors - VW3M8102R15Document2 pagesLexium 32 & Motors - VW3M8102R15Anita IonelaNo ratings yet
- phoenix-contact-1159037-roDocument21 pagesphoenix-contact-1159037-roAnita IonelaNo ratings yet
- XVBZ02: Product Data SheetDocument4 pagesXVBZ02: Product Data SheetAnita IonelaNo ratings yet
- XVBC12: Product Data SheetDocument4 pagesXVBC12: Product Data SheetAnita IonelaNo ratings yet
- XVBZ04: Product Data SheetDocument4 pagesXVBZ04: Product Data SheetAnita IonelaNo ratings yet
- 3TK28282BB41 Datasheet enDocument6 pages3TK28282BB41 Datasheet enAnita IonelaNo ratings yet
- Harmony XVB - DL1BDB3Document2 pagesHarmony XVB - DL1BDB3Anita IonelaNo ratings yet
- Snap Action Switch: FeaturesDocument3 pagesSnap Action Switch: FeaturesAnita IonelaNo ratings yet
- Harmony XAC XACA09Document1 pageHarmony XAC XACA09Anita IonelaNo ratings yet
- Tesys K Lp1k0910bdDocument1 pageTesys K Lp1k0910bdAnita IonelaNo ratings yet
- Product Data Sheet: Ic60N - Intreruptor Automat Miniatura - 1P - 63A - Curba CDocument2 pagesProduct Data Sheet: Ic60N - Intreruptor Automat Miniatura - 1P - 63A - Curba CAnita IonelaNo ratings yet
- 3KA71234AA00 Datasheet en PDFDocument2 pages3KA71234AA00 Datasheet en PDFAnita IonelaNo ratings yet
- 3KA71234AA00 Datasheet enDocument2 pages3KA71234AA00 Datasheet enAnita IonelaNo ratings yet
- Product Data Sheet: Transparent Boot For Circular Flush Pushbutton Ø22Document1 pageProduct Data Sheet: Transparent Boot For Circular Flush Pushbutton Ø22Anita IonelaNo ratings yet
- DL Slim Alu DN 205 22 W 4000 K WT: Product DatasheetDocument5 pagesDL Slim Alu DN 205 22 W 4000 K WT: Product DatasheetAnita IonelaNo ratings yet
- Unica: Catalogue 2016Document252 pagesUnica: Catalogue 2016Anita IonelaNo ratings yet
- Arm Vs IntelDocument19 pagesArm Vs IntelAnita IonelaNo ratings yet
- Harmony Xb5r Zb4rta3Document7 pagesHarmony Xb5r Zb4rta3Anita IonelaNo ratings yet
- Body Control Modules: Instructor NameDocument58 pagesBody Control Modules: Instructor NameAnita IonelaNo ratings yet
- WBNR La Auto BCM SpanishDocument41 pagesWBNR La Auto BCM SpanishAnita Ionela100% (1)
- New Vistas On Automotive Embedded Systems: Edited and Presented by Alberto Sangiovanni-Vincentelli UC BerkeleyDocument25 pagesNew Vistas On Automotive Embedded Systems: Edited and Presented by Alberto Sangiovanni-Vincentelli UC BerkeleyAnita IonelaNo ratings yet
- Tesys D - lc1d25jlDocument4 pagesTesys D - lc1d25jlAnita IonelaNo ratings yet
- Artikel-Nr.: Qti Dali 1X36 Dim Code: 4050300870427 QT CFL Quicktronic Intelligent Qti Dali Dim Für Dulux L Qti Dali 1X36 DimDocument2 pagesArtikel-Nr.: Qti Dali 1X36 Dim Code: 4050300870427 QT CFL Quicktronic Intelligent Qti Dali Dim Für Dulux L Qti Dali 1X36 DimAnita IonelaNo ratings yet
- C200 WML 303Document60 pagesC200 WML 303Anita IonelaNo ratings yet
- Body Control Module (BCM) : Hella Kgaa Hueck & CoDocument4 pagesBody Control Module (BCM) : Hella Kgaa Hueck & CoAnita IonelaNo ratings yet
- MCP 3008Document34 pagesMCP 3008Anita IonelaNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
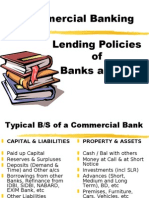
- Lending Policies of Indian BanksDocument47 pagesLending Policies of Indian BanksProf Dr Chowdari Prasad80% (5)
- Biological ClassificationDocument21 pagesBiological ClassificationdeviNo ratings yet
- @9negros Occidental Vs BezoreDocument3 pages@9negros Occidental Vs BezoreSimeon SuanNo ratings yet
- Contoh Permintaan Obat CitoDocument2 pagesContoh Permintaan Obat CitoAriandy yanuarNo ratings yet
- Y. C. Fung - Biomechanics - Motion, Flow, Stress, and Growth-Springer-Verlag New York (1990)Document582 pagesY. C. Fung - Biomechanics - Motion, Flow, Stress, and Growth-Springer-Verlag New York (1990)saurabh kumar gupta100% (2)
- Magtech 2013 - 04 - 05 - MPV - Eng PDFDocument2 pagesMagtech 2013 - 04 - 05 - MPV - Eng PDFPabloNo ratings yet
- 2016 Liberal Policy ResolutionsDocument86 pages2016 Liberal Policy ResolutionsCPAC TVNo ratings yet
- Brooklyn Hops BreweryDocument24 pagesBrooklyn Hops BrewerynyairsunsetNo ratings yet
- Affidavit Format FOR ART LEVEL 1 CLINIC RegistrationDocument2 pagesAffidavit Format FOR ART LEVEL 1 CLINIC Registrationward fiveNo ratings yet
- CGG Book 1Document34 pagesCGG Book 1api-245318709No ratings yet
- Weather and ClimateDocument5 pagesWeather and ClimateprititjadhavnNo ratings yet
- SC4622 (CX) G3-399-04 - Ship Structural Access ManualDocument40 pagesSC4622 (CX) G3-399-04 - Ship Structural Access ManualBen TanNo ratings yet
- Wrestling Strength and ConditioningDocument12 pagesWrestling Strength and ConditioningTintin BilatbatNo ratings yet
- RSA 12 - Laser Attacks Safety GuidelinesDocument19 pagesRSA 12 - Laser Attacks Safety Guidelinesrona putriNo ratings yet
- Chemical Engineering: ReactionDocument59 pagesChemical Engineering: Reactionnluvwjm7275No ratings yet
- Peritoneal Dialysis Unit Renal Department SGH PD WPI 097 Workplace InstructionDocument10 pagesPeritoneal Dialysis Unit Renal Department SGH PD WPI 097 Workplace InstructionAjeng SuparwiNo ratings yet
- Life Everlasting 2021001Document11 pagesLife Everlasting 2021001realangelinemylee2020721001No ratings yet
- ISBB CompilationDocument6 pagesISBB CompilationElla SalesNo ratings yet
- Incorporating Developmental Screening and Surveillance of Young Children in Office PracticeDocument9 pagesIncorporating Developmental Screening and Surveillance of Young Children in Office PracticeakshayajainaNo ratings yet
- Membrane AutopsyDocument2 pagesMembrane AutopsyBiljana TausanovicNo ratings yet
- Wel-Come: Heat Treatment Process (TTT, CCT & CCR)Document14 pagesWel-Come: Heat Treatment Process (TTT, CCT & CCR)atulkumargaur26No ratings yet
- Pressure MeasurementDocument293 pagesPressure MeasurementGlen Lauren PerezNo ratings yet
- Epigenetics & HomoeopathyDocument17 pagesEpigenetics & HomoeopathyBishal100% (1)
- BÀI TẬP BUỔI SỐ 2 - VIẾT UNIT 1Document7 pagesBÀI TẬP BUỔI SỐ 2 - VIẾT UNIT 1Huy Trương GiaNo ratings yet
- Complete Prerequisite Program v2Document78 pagesComplete Prerequisite Program v2Ramasubramanian Sankaranarayanan100% (1)
- Prednisolone Versus Dexamethasone For Croup: A Randomized Controlled TrialDocument11 pagesPrednisolone Versus Dexamethasone For Croup: A Randomized Controlled TrialA Joel ZjNo ratings yet
- CHDC8 Cargador de BateriasDocument1 pageCHDC8 Cargador de Bateriasleoscalor6356No ratings yet
- Doppler EffectDocument47 pagesDoppler EffectLouies UngriaNo ratings yet
- Energy Savings at DCL PDFDocument83 pagesEnergy Savings at DCL PDFnsprasad88100% (1)
- A Research Presented ToDocument28 pagesA Research Presented ToAngeliePanerioGonzagaNo ratings yet