You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Lecture 3 - Flowsheeting in GPROMSDocument18 pagesLecture 3 - Flowsheeting in GPROMSEverton CollingNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Pump Design WorksheetDocument3 pagesPump Design Worksheetejzuppelli8036100% (8)
- Bollard Pull CalculationDocument1 pageBollard Pull CalculationMark Samsel Rohan100% (2)
- Dynamic Systems TheoryDocument12 pagesDynamic Systems TheoryBecker Seifert100% (1)
- Hydraulically Driven Deck MachineryDocument2 pagesHydraulically Driven Deck MachineryMohamed FouadNo ratings yet
- Pump CalcDocument8 pagesPump CalcMohamed FouadNo ratings yet
- Boyce Elementary Differential Equations. SolutionsDocument590 pagesBoyce Elementary Differential Equations. SolutionsAlice Yan90% (10)
- Shipbuilding Quality Standard GuideDocument59 pagesShipbuilding Quality Standard Guidenyaungzin100% (2)
- Brochure Marine ServicesDocument12 pagesBrochure Marine ServicesMohamed FouadNo ratings yet
- Design of Pumping Machinery for Water Supply ProjectDocument1 pageDesign of Pumping Machinery for Water Supply ProjectSn SatyanarayanaNo ratings yet
- Bifurcations Economics Models PDFDocument24 pagesBifurcations Economics Models PDFComplejidady EconomíaNo ratings yet
- Kind of ValvesDocument2 pagesKind of ValvesMohamed FouadNo ratings yet
- Diaphragm Valves: Prof. DR: Nazih BayomiDocument68 pagesDiaphragm Valves: Prof. DR: Nazih BayomiMohamed FouadNo ratings yet
- Kind of ValvesDocument2 pagesKind of ValvesMohamed FouadNo ratings yet
- 9-Valves Rating9Document29 pages9-Valves Rating9Mohamed FouadNo ratings yet
- Detail - MTU OnlineDocument1 pageDetail - MTU OnlineMohamed FouadNo ratings yet
- Propeller Performance and Weight Predictions Appended To The Navy/NASADocument40 pagesPropeller Performance and Weight Predictions Appended To The Navy/NASAMohamed FouadNo ratings yet
- Cont RoundDocument1 pageCont RoundMohamed FouadNo ratings yet
- Pre-Feasibility Study: S H I P B R E A K I N GDocument46 pagesPre-Feasibility Study: S H I P B R E A K I N GMohamed FouadNo ratings yet
- Amirikiann A.analysis and Design .1957.TRANSDocument55 pagesAmirikiann A.analysis and Design .1957.TRANSMohamed FouadNo ratings yet
- 40ft shallowWaterWorkBarge4 2Document1 page40ft shallowWaterWorkBarge4 2Mohamed FouadNo ratings yet
- V53 2 p95 p102 PDFDocument8 pagesV53 2 p95 p102 PDFMohamed FouadNo ratings yet
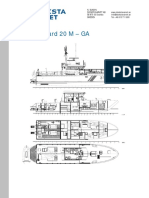
- 20m Ga Drawings1Document1 page20m Ga Drawings1Mohamed FouadNo ratings yet
- 40ft shallowWaterWorkBarge1Document1 page40ft shallowWaterWorkBarge1Mohamed FouadNo ratings yet
- 40ft shallowWaterWorkBarge3Document1 page40ft shallowWaterWorkBarge3Mohamed FouadNo ratings yet
- 40ft shallowWaterWorkBarge5Document1 page40ft shallowWaterWorkBarge5Mohamed FouadNo ratings yet
- Modularization Analysis Presentation Revised PDFDocument38 pagesModularization Analysis Presentation Revised PDFshiva1978in@gmail.comNo ratings yet
- Wang DDocument4 pagesWang DMohamed FouadNo ratings yet
- 40ft shallowWaterWorkBarge2Document1 page40ft shallowWaterWorkBarge2Mohamed FouadNo ratings yet
- Full Text 01Document61 pagesFull Text 01Imam BaihaqiNo ratings yet
- ForanTribon Into 3D Naval Architect Jan12Document2 pagesForanTribon Into 3D Naval Architect Jan12Mohamed FouadNo ratings yet
- Optimizacion Ship DesignDocument13 pagesOptimizacion Ship Designlucas polo100% (1)
- 1211 1365 PDFDocument14 pages1211 1365 PDFMohamed FouadNo ratings yet
- Strogatz NDCs 24 e 9Document2 pagesStrogatz NDCs 24 e 9Prabhat RanjanNo ratings yet
- MATLAB Symbolic ExerciseDocument5 pagesMATLAB Symbolic Exercisesatya_vanapalli3422100% (1)
- Ruta Al Caos PDFDocument33 pagesRuta Al Caos PDFDiego VilchesNo ratings yet
- Multivariable Control and Coordination Systems Case StudiesDocument12 pagesMultivariable Control and Coordination Systems Case StudiesOliver Colombini LjungbergNo ratings yet
- LAB ReportDocument12 pagesLAB ReportDaniel Uwaomah0% (1)
- Sympy Ode Example 12Document3 pagesSympy Ode Example 12Hemant KuralkarNo ratings yet
- Written Assignment #3: Riccati Equations (Solutions)Document4 pagesWritten Assignment #3: Riccati Equations (Solutions)PaolaNo ratings yet
- Section: Difference EquationsDocument12 pagesSection: Difference EquationsS.M. Fauzul AzimNo ratings yet
- Homework 5 SolutionsDocument10 pagesHomework 5 SolutionsBryle CoNo ratings yet
- Intervals of ValidityDocument6 pagesIntervals of Validitytarun gehlotNo ratings yet
- Population Growth: Flows O N The LineDocument6 pagesPopulation Growth: Flows O N The LineRaúl Baigorri MartínezNo ratings yet
- Appendix CDocument27 pagesAppendix CZain Afif HidayatNo ratings yet
- Differential Equation II MathDocument3 pagesDifferential Equation II MathRafid ShidqiNo ratings yet
- Demo DiffEQDocument26 pagesDemo DiffEQHarishNo ratings yet
- Web Work EcuacionesDocument7 pagesWeb Work EcuacionesAlexMelgarNo ratings yet
- HW 1Document5 pagesHW 1tt_aljobory3911No ratings yet
- On The Concept of Solution For Fractional Differential Equations With UncertaintyDocument5 pagesOn The Concept of Solution For Fractional Differential Equations With UncertaintyBoutiara AbdellatifNo ratings yet
- 03 - 1 - Mathematical Modeling Using SimScape - ElectricalDocument14 pages03 - 1 - Mathematical Modeling Using SimScape - ElectricalNaveen ShirurNo ratings yet
- SMDocument176 pagesSMjcurol4No ratings yet
- Advanced Control System Design Prof. Radhakant Padhi Department of Aerospace Engineering Indian Institute of Science, BangaloreDocument38 pagesAdvanced Control System Design Prof. Radhakant Padhi Department of Aerospace Engineering Indian Institute of Science, BangaloreJai SebastianNo ratings yet
- MODFLOW 6 Release Notes: Version Mf6.1.0-December 12, 2019Document26 pagesMODFLOW 6 Release Notes: Version Mf6.1.0-December 12, 2019AkmalNo ratings yet
- Differential Equations For Growth and Decay: Math 102 Section 102, Mingfeng QiuDocument22 pagesDifferential Equations For Growth and Decay: Math 102 Section 102, Mingfeng QiuLaisa VittoNo ratings yet
- Practice Set I on Partial Differential Equations and ProbabilityDocument4 pagesPractice Set I on Partial Differential Equations and ProbabilityRaj PratyushNo ratings yet
- Numerical Simulation of Difference EquationsDocument29 pagesNumerical Simulation of Difference EquationsumityilmazNo ratings yet
- LCS Lab 3Document14 pagesLCS Lab 3Zainab AshrafNo ratings yet