You might also like
- ENI GEIPI Physique 2010Document9 pagesENI GEIPI Physique 2010la physique selon le programme FrançaisNo ratings yet
- Eni Geipi Physique 2009Document9 pagesEni Geipi Physique 2009la physique selon le programme FrançaisNo ratings yet
- Tagemage AnnalesDocument32 pagesTagemage AnnalespfservantNo ratings yet
- Corrige GEIPI Sujet 1Document9 pagesCorrige GEIPI Sujet 1la physique selon le programme FrançaisNo ratings yet
- Eni Geipi Physique 2009Document9 pagesEni Geipi Physique 2009la physique selon le programme FrançaisNo ratings yet
- Corrige ENI GEIPI Physique 2009Document8 pagesCorrige ENI GEIPI Physique 2009la physique selon le programme FrançaisNo ratings yet
- Corrige Eni Geipi Sujet 1Document7 pagesCorrige Eni Geipi Sujet 1la physique selon le programme FrançaisNo ratings yet
- 08 PhysMPDocument8 pages08 PhysMPla physique selon le programme FrançaisNo ratings yet
- Epreuve de Physique 2005 Concours D Admission Al ESSADocument4 pagesEpreuve de Physique 2005 Concours D Admission Al ESSAla physique selon le programme FrançaisNo ratings yet
- Corrige Geipi QCM 2006Document7 pagesCorrige Geipi QCM 2006la physique selon le programme FrançaisNo ratings yet
- Corrige ENI GEIPI Physique 2009Document8 pagesCorrige ENI GEIPI Physique 2009la physique selon le programme FrançaisNo ratings yet
- Dusa 2 Dspe 2 Dsujet 2 Dtitragechlorureconductimetrie 2 D 4 PtsDocument3 pagesDusa 2 Dspe 2 Dsujet 2 Dtitragechlorureconductimetrie 2 D 4 Ptsla physique selon le programme FrançaisNo ratings yet
- S Physique Chimie Obligatoire 2010 Metropole SujetDocument10 pagesS Physique Chimie Obligatoire 2010 Metropole SujetTHT31No ratings yet
- Corrige Exercices Conductimetrie Feuille Travaux DirigesDocument3 pagesCorrige Exercices Conductimetrie Feuille Travaux Dirigesla physique selon le programme Français89% (9)
- Cond 02Document17 pagesCond 02la physique selon le programme FrançaisNo ratings yet
- DS de Physique-Chimie N°3 Mercredi 10 Novembre 2010Document4 pagesDS de Physique-Chimie N°3 Mercredi 10 Novembre 2010la physique selon le programme Français100% (1)
- en Raisonnant Sur Un Ion I, de Concentration C V: F Où F Est Le Faraday e 9, 65.10Document3 pagesen Raisonnant Sur Un Ion I, de Concentration C V: F Où F Est Le Faraday e 9, 65.10la physique selon le programme FrançaisNo ratings yet
- Corrige Exercices Conductimetrie Feuille Travaux DirigesDocument3 pagesCorrige Exercices Conductimetrie Feuille Travaux Dirigesla physique selon le programme Français89% (9)
- Cours ConductimetrieDocument8 pagesCours Conductimetrienico21du13No ratings yet
- 2004 Specialite SujetsDocument54 pages2004 Specialite Sujetsla physique selon le programme FrançaisNo ratings yet
- Devoir Commun 1S 2005 Exercice 1:: SO (Aq) + I (Aq) + 2 H O SO (Aq) + 2 I (Aq) + 4 H (Aq)Document2 pagesDevoir Commun 1S 2005 Exercice 1:: SO (Aq) + I (Aq) + 2 H O SO (Aq) + 2 I (Aq) + 4 H (Aq)la physique selon le programme FrançaisNo ratings yet
- 1s DST 3Document4 pages1s DST 3la physique selon le programme FrançaisNo ratings yet
- S Physique Chimie Obligatoire 2010 Metropole SujetDocument10 pagesS Physique Chimie Obligatoire 2010 Metropole SujetTHT31No ratings yet
- 2010 Polynesie Spe Exo3 Correction AnanasDocument2 pages2010 Polynesie Spe Exo3 Correction Ananasla physique selon le programme FrançaisNo ratings yet
- 2010 Pondichery Exo2 Spe Sujet Eugenol 4ptsDocument4 pages2010 Pondichery Exo2 Spe Sujet Eugenol 4ptsla physique selon le programme FrançaisNo ratings yet
- 2010 Pondichery Exo1 Sujet Polonium 6ptsDocument2 pages2010 Pondichery Exo1 Sujet Polonium 6ptsla physique selon le programme FrançaisNo ratings yet
- 2010 Pondichery Exo2 Spe Correction Eugenol 4ptsDocument2 pages2010 Pondichery Exo2 Spe Correction Eugenol 4ptsla physique selon le programme FrançaisNo ratings yet
- 2010 Polynesie Spe Exo3 Sujet AnanasDocument4 pages2010 Polynesie Spe Exo3 Sujet Ananasla physique selon le programme FrançaisNo ratings yet
- 2010 Pondichery Exo1 Correction Polonium 6ptsDocument2 pages2010 Pondichery Exo1 Correction Polonium 6ptsla physique selon le programme FrançaisNo ratings yet
- Propagation D'une Onde LumineuseDocument4 pagesPropagation D'une Onde Lumineusepdf100% (2)
- Phy TD Seq 2 21 22Document2 pagesPhy TD Seq 2 21 22ßørïs Fiłs Øf GødNo ratings yet
- Guide Fondamentaux de l'EP PDFDocument52 pagesGuide Fondamentaux de l'EP PDFMohamed RaouyNo ratings yet
- Chapitre 02 Cours de Transmission Par Fibre OptiqueDocument12 pagesChapitre 02 Cours de Transmission Par Fibre OptiquehoxxosNo ratings yet
- Circuits ÉlectriquesDocument53 pagesCircuits Électriqueselectrique100% (2)
- KEVINDocument3 pagesKEVINStéphane Tchuidjang100% (1)
- OranDocument2 pagesOranMoulod MouloudNo ratings yet
- Exam SR 14-15 PDFDocument2 pagesExam SR 14-15 PDFabdomarinNo ratings yet
- VcselDocument10 pagesVcselkhalil meskarNo ratings yet
- Exotype33 PDFDocument3 pagesExotype33 PDFayaNo ratings yet
- Communication: RéférenceDocument21 pagesCommunication: RéférenceNeven GvozdAnovićNo ratings yet
- La Fibre Optique: Exposé TechniqueDocument29 pagesLa Fibre Optique: Exposé TechniquewebaizzerNo ratings yet
- TD 7 Eom-1718polarisationDocument5 pagesTD 7 Eom-1718polarisationSouhail MssassiNo ratings yet
- Chapitre 1 ElectrostatiqueDocument10 pagesChapitre 1 ElectrostatiqueBeyaz Çiçek100% (1)
- PV Model 2diodeDocument3 pagesPV Model 2diodepatrijuvetNo ratings yet
- Série Interaction Onde MatièreDocument6 pagesSérie Interaction Onde MatièreHabib DarouicheNo ratings yet
- FICHE2Document2 pagesFICHE2Samouka SoumahoroNo ratings yet
- L2S3 MecaSol FormulaireDocument7 pagesL2S3 MecaSol FormulaireDaoud El CaidNo ratings yet
- 2009 Afrique Exo2 Correction Neptune Satellites 5 5ptsDocument2 pages2009 Afrique Exo2 Correction Neptune Satellites 5 5ptsla physique selon le programme FrançaisNo ratings yet
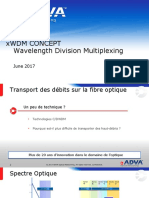
- ADVA - XWDM C'est Quoi - 14062017 v1.0Document20 pagesADVA - XWDM C'est Quoi - 14062017 v1.0Tina MoNo ratings yet
- Physique EB8 3eme SemDocument3 pagesPhysique EB8 3eme SemFatima Mahdi50% (2)
- Canon 7d Réglages Photo Nature Et OiseauxDocument14 pagesCanon 7d Réglages Photo Nature Et OiseauxIssoumaila AlassaneNo ratings yet
- FASCICULE PC 3eme ADEM PDFDocument44 pagesFASCICULE PC 3eme ADEM PDFAbou Gueye96% (47)
- TD1 2022 2023Document3 pagesTD1 2022 2023Mbarick FallNo ratings yet
- Memento de Sciences de L'ingenieur Pour PrepaDocument6 pagesMemento de Sciences de L'ingenieur Pour PrepaZiyadNo ratings yet
- Chapitre 4 Lentilles Épaisses Et Minces.Document11 pagesChapitre 4 Lentilles Épaisses Et Minces.ETUSUP100% (2)
- Commande Electrique Des MachinesDocument20 pagesCommande Electrique Des MachinesMohammed Elkaim Billah100% (1)
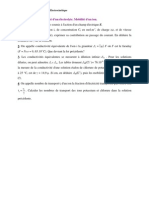
- Courants de FoucaultDocument3 pagesCourants de FoucaultĶĥ ĴãmëşNo ratings yet
- ExposeDocument7 pagesExposePrécieux DEGBO-KOBONo ratings yet
- A - Sciences PhysiquesDocument2 pagesA - Sciences PhysiquesAina RATSIMBAZAFYNo ratings yet