You might also like
- Manual Abb-Acs-150 PDFDocument33 pagesManual Abb-Acs-150 PDFDaniel Murillo BarbozaNo ratings yet
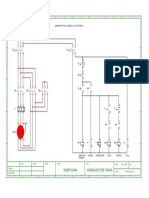
- Diagrama Eléctrico de Control de La Puesta en Marcha y Paro Del Torno MecánicoDocument5 pagesDiagrama Eléctrico de Control de La Puesta en Marcha y Paro Del Torno MecánicoGerman MartinezNo ratings yet
- Regulación de Los Interruptores AutomáticosDocument6 pagesRegulación de Los Interruptores AutomáticosMikami TeruNo ratings yet
- Conexion 1 Variador Con PotenciometroDocument2 pagesConexion 1 Variador Con PotenciometroFernando Leal100% (1)
- 3RW40Document230 pages3RW40BlAdE 12100% (1)
- Capacitación Instalacion Operacion DseDocument6 pagesCapacitación Instalacion Operacion Dseerick arevalo arevaloNo ratings yet
- Variador de Frecuencia y PLCDocument1 pageVariador de Frecuencia y PLCAndres ArroyoNo ratings yet
- Instalaciones Electricas Industriales v-2Document53 pagesInstalaciones Electricas Industriales v-2David SandovalNo ratings yet
- Manual de Usuario para La Dobladora de Tubos HidraulicaDocument1 pageManual de Usuario para La Dobladora de Tubos HidraulicaDiego Salazar100% (1)
- Arranque Estrella Triángulo - Cad PDFDocument1 pageArranque Estrella Triángulo - Cad PDFraulNo ratings yet
- Grameyer GRT7-TH4 R4Document21 pagesGrameyer GRT7-TH4 R4Ricardo Mèndez LòpezNo ratings yet
- Proteccion Variadores ABBDocument1 pageProteccion Variadores ABBJuan Galves67% (3)
- Probador de Interruptor Diferencial PDFDocument3 pagesProbador de Interruptor Diferencial PDFvictorzucheNo ratings yet
- Definicion de Los Tableros de Trasferencia AutomaticaDocument5 pagesDefinicion de Los Tableros de Trasferencia AutomaticaGIAN PIERO RODRIGUEZ SANTOSNo ratings yet
- ElectricidadElectricitat Megado de Un Motor de Jaula de Ardilla y Medida ContinDocument11 pagesElectricidadElectricitat Megado de Un Motor de Jaula de Ardilla y Medida ContinRUBEN VALDIVIANo ratings yet
- 8 Variador de Frecuencia CFW500Document22 pages8 Variador de Frecuencia CFW500Pablo Mamani Rojas100% (1)
- Trifasico March ContraDocument4 pagesTrifasico March ContraDaniel Santa CruzNo ratings yet
- Sistema de Control Alternado de BombasDocument6 pagesSistema de Control Alternado de BombasEduardo Alexander Moscoso ParionaNo ratings yet
- Dixell España XR35CX SP M&M r1 1 20 08 2012 PDFDocument6 pagesDixell España XR35CX SP M&M r1 1 20 08 2012 PDFGilberto Manotas BolañoNo ratings yet
- Catalogo Resistencias Calefactoras PDFDocument140 pagesCatalogo Resistencias Calefactoras PDFNicolás Romía100% (2)
- T-06 Diagnóstico y Mantenimiento de Un Generador Síncrono TerminadoDocument22 pagesT-06 Diagnóstico y Mantenimiento de Un Generador Síncrono TerminadoMarco Aurelio II100% (2)
- 3conex Motor DahlanderDocument9 pages3conex Motor DahlanderAnonymous 1pJlTIy45No ratings yet
- 5 Motor MonofásicoDocument11 pages5 Motor MonofásicoCarito Obando0% (1)
- Altistart 22 Guia RapidaDocument4 pagesAltistart 22 Guia RapidaHavier RomeroNo ratings yet
- Manual de Programacion Variador SC310 AbbDocument49 pagesManual de Programacion Variador SC310 AbbJose Luis Sovero AstoamanNo ratings yet
- Conexionado de Motor de Inducción Trifásico. - Arranque Directo Con Inversión de Giro de Motor de Inducción TrifásicoDocument43 pagesConexionado de Motor de Inducción Trifásico. - Arranque Directo Con Inversión de Giro de Motor de Inducción TrifásicoRichard M GironNo ratings yet
- Resumen CADE SIMU 3Document7 pagesResumen CADE SIMU 3Abel Jiménez RodríguezNo ratings yet
- SGE-M-ET-001 Manual Arranacador PE START VO2 160108Document22 pagesSGE-M-ET-001 Manual Arranacador PE START VO2 160108CRISTIAN DAVID OROYA INFANTESNo ratings yet
- Mantenimiento Arrancador ElectricoDocument3 pagesMantenimiento Arrancador Electricoangel0% (1)
- Arranque SuaveDocument53 pagesArranque SuaveClark Sword100% (1)
- Tarea - Laboratorio Programacion 1Document29 pagesTarea - Laboratorio Programacion 1Ken SVNo ratings yet
- Catálogo de Riel DIN 1 PDFDocument2 pagesCatálogo de Riel DIN 1 PDFmartin mannoneNo ratings yet
- Arrancadoe SMC Flex ABDocument148 pagesArrancadoe SMC Flex ABJonathan MondragonNo ratings yet
- Elementos de AccionamientoDocument7 pagesElementos de AccionamientoIskender javier Hernández torrezNo ratings yet
- Dse 6020 PDFDocument3 pagesDse 6020 PDFEverCordovaQuispeNo ratings yet
- Cade SimuDocument4 pagesCade SimufabianNo ratings yet
- Método de Arranque de Motores Eléctricos Trifásicos.Document15 pagesMétodo de Arranque de Motores Eléctricos Trifásicos.alcibogadoaguero100% (1)
- Contactores 1Document6 pagesContactores 1Quimey Leo Khan BernalNo ratings yet
- Practica 7 Estrella Triángulo HMIDocument6 pagesPractica 7 Estrella Triángulo HMIStalyn BanegasNo ratings yet
- Tarea ColaborativaDocument5 pagesTarea ColaborativaAlejandro LauraNo ratings yet
- Accionamiento de Contactor Mediante Pulsadores Sin EnclavamientoDocument5 pagesAccionamiento de Contactor Mediante Pulsadores Sin EnclavamientoAlexander GonzálezNo ratings yet
- PTs y CTsDocument15 pagesPTs y CTsPICHILINGUE ESENARRO RUBEN MARTINNo ratings yet
- Realiza Extracción de Bobinado Trifásico: #Tareas U Operaciones Operaciones Ejecutadas Operaciones FaltantesDocument1 pageRealiza Extracción de Bobinado Trifásico: #Tareas U Operaciones Operaciones Ejecutadas Operaciones FaltantesFernando Elías PajueloNo ratings yet
- Schneider Electric - Guia de Incio Rapido Atv600Document4 pagesSchneider Electric - Guia de Incio Rapido Atv600Ronald Estrada100% (1)
- Atom Troquel Bandera EX 17Document4 pagesAtom Troquel Bandera EX 17Diego Alberto Gonzalez CutaNo ratings yet
- Tableros de Transferencia AutomaticaDocument7 pagesTableros de Transferencia AutomaticaRubén Darío Azael100% (1)
- Problemas de Circuito de Mando 1 2020Document5 pagesProblemas de Circuito de Mando 1 2020Torito MoreNo ratings yet
- Calcular Espiras y Calibre de BobinadoDocument7 pagesCalcular Espiras y Calibre de BobinadoWilliam MasterNo ratings yet
- Arranque Estrella Triangulo Del Motor Electrico TrifásicoDocument10 pagesArranque Estrella Triangulo Del Motor Electrico TrifásicoJulio Yataco VivasNo ratings yet
- Interruptor RotativoDocument31 pagesInterruptor RotativoRomulo Vega Villegas67% (3)
- Variador de Velocidad - SenatiDocument4 pagesVariador de Velocidad - SenatiJunior StevenNo ratings yet
- Prototipo para El Control de Motor Inversor de Giro Con Finales de CarreraDocument6 pagesPrototipo para El Control de Motor Inversor de Giro Con Finales de CarreraJhonathan Sarria AguilarNo ratings yet
- Calculo de Alimentador y Proteccion para MotoresDocument13 pagesCalculo de Alimentador y Proteccion para MotoresJoss Reyes100% (1)
- Amplificadores OperacionalesDocument9 pagesAmplificadores OperacionalesDanilo ChicaNo ratings yet
- Motor EsDocument31 pagesMotor EsJose Carlos Caselis VazquezNo ratings yet
- Arranque de Motores Trifásicos de Dos Velocidades Conexión DahlanderDocument9 pagesArranque de Motores Trifásicos de Dos Velocidades Conexión Dahlanderndani10No ratings yet
- Motores de Dos Velocidades Trifasico PDFDocument6 pagesMotores de Dos Velocidades Trifasico PDF177393No ratings yet
- Conexiones para Motor Eléctrico de Dos VelocidadesDocument12 pagesConexiones para Motor Eléctrico de Dos VelocidadesDanLeo17No ratings yet
- Motores de Polos SubsecuentesDocument7 pagesMotores de Polos SubsecuentesChaveliv Tiburonov KabronovskyNo ratings yet
- Arranque Estrella TrianguloDocument14 pagesArranque Estrella TriangulofrancisdeywiNo ratings yet
- Manual de Instalaciones ElectricasDocument50 pagesManual de Instalaciones ElectricasGeovanni Anticona Malque100% (11)
- Instalaciones Basicas de ElectricidadDocument30 pagesInstalaciones Basicas de ElectricidadJuan SalinasNo ratings yet
- LIBRO - Juan Díaz Navarro - Tecnicas de Mantenimiento Industrial PDFDocument235 pagesLIBRO - Juan Díaz Navarro - Tecnicas de Mantenimiento Industrial PDFFreeLatinBird100% (6)
- Capitulo 3Document152 pagesCapitulo 3Antonio GómezNo ratings yet
- Libro Instalaciones ElectricasDocument281 pagesLibro Instalaciones Electricaspnk-johan18100% (1)
- Guia de Compensacion de Energia Reactiva PDFDocument32 pagesGuia de Compensacion de Energia Reactiva PDFGeovanni Anticona MalqueNo ratings yet
- Centrales Electricas Castelfranchi Tomo I PDFDocument268 pagesCentrales Electricas Castelfranchi Tomo I PDFGeovanni Anticona Malque100% (1)
- Proyecto Maquina DobladoraDocument223 pagesProyecto Maquina DobladoraGeovanni Anticona MalqueNo ratings yet
- Nueva Enciclopedia de La Climatizacion Aire Acondicionados PDFDocument167 pagesNueva Enciclopedia de La Climatizacion Aire Acondicionados PDFRichard Rodriguez Medina100% (1)
- ARGUMENTO DE LA OBRA OLIVER TWIST, REvolucion IndustrialDocument6 pagesARGUMENTO DE LA OBRA OLIVER TWIST, REvolucion IndustrialServi-Compu Pasaquina0% (1)
- Portafolio de Titulo RCHDocument38 pagesPortafolio de Titulo RCHluis muñoz perezNo ratings yet
- La Quimica Al Alcance de Todos de María Del Carmen Pascual VillalobosDocument6 pagesLa Quimica Al Alcance de Todos de María Del Carmen Pascual VillalobosCANDIOTA DE VINOS Y LICORES SANo ratings yet
- Reed Rocmaster A40hp PDFDocument2 pagesReed Rocmaster A40hp PDFDiego Ramos Sakata100% (2)
- Informacion para ImprimirDocument4 pagesInformacion para ImprimirYeferson JimenezNo ratings yet
- Programacion de TemporizadorDocument4 pagesProgramacion de TemporizadorLalo ZapataNo ratings yet
- Carga en El Eje de Una Bobina CircularDocument6 pagesCarga en El Eje de Una Bobina Circularcesar miguel velasco chaconNo ratings yet
- Botas de SeguridadDocument10 pagesBotas de SeguridadLorenaRojasNo ratings yet
- La Panela Pasos en La PreparacionDocument6 pagesLa Panela Pasos en La PreparacionEdgar PinedaNo ratings yet
- El Sonido 1°medioDocument15 pagesEl Sonido 1°medioKalu CarrascoNo ratings yet
- Tarifas ElectricasDocument11 pagesTarifas ElectricasCarlosNo ratings yet
- Industrial Figuacero S A S en Liquidacion: Empresas IndustrialesDocument19 pagesIndustrial Figuacero S A S en Liquidacion: Empresas Industrialescristian andres castañeda ibarraNo ratings yet
- El Reino de Los Dioses PDFDocument30 pagesEl Reino de Los Dioses PDFlarriagadaNo ratings yet
- Frecuencia Natural de Un Péndulo (Monografia) 1Document6 pagesFrecuencia Natural de Un Péndulo (Monografia) 1JuanJoseVasquezCastilloNo ratings yet
- Poweramp Line Card - Letter - ESDocument4 pagesPoweramp Line Card - Letter - ESServimatec ServimatecNo ratings yet
- Manual de Multimetro DigitalDocument10 pagesManual de Multimetro DigitalAngel100% (1)
- Lista AgentesDocument65 pagesLista AgentesЯна СавченкоNo ratings yet
- Nikon DTM-332-352Document256 pagesNikon DTM-332-352Llanitos López Ruiz100% (1)
- Características de Las Baterías de Litio LiFePO4Document2 pagesCaracterísticas de Las Baterías de Litio LiFePO4Sofia CapuñayNo ratings yet
- Maqueta 2-3-4 21 NovDocument29 pagesMaqueta 2-3-4 21 NovPita FernándezNo ratings yet
- Informe Proyecto Degradacion de Queratina A Partir de Plumas de PolloDocument19 pagesInforme Proyecto Degradacion de Queratina A Partir de Plumas de PolloAndrea Rosmery S. MamavrgazNo ratings yet
- Trabajo Colaborativo - Fase 2 Grupo 243011 471 - Aplicar Componentes Sistemas HidroneumáticosDocument22 pagesTrabajo Colaborativo - Fase 2 Grupo 243011 471 - Aplicar Componentes Sistemas Hidroneumáticosalexis pedrozaNo ratings yet
- PDF Translator 1615135378472Document84 pagesPDF Translator 1615135378472jonattanNo ratings yet
- Estructuras HidraulicasDocument145 pagesEstructuras HidraulicasManuel Reymundo MelendezNo ratings yet
- OB Problemas 11 2011 12... EvaporadoresDocument12 pagesOB Problemas 11 2011 12... EvaporadoresAaron Espinoza80% (5)
- 300-40800-RSIA-009 Anexo 9 (Lista de Verificación 50001)Document10 pages300-40800-RSIA-009 Anexo 9 (Lista de Verificación 50001)KEVIN AXEL ROMERO MONTA√ëEZNo ratings yet
- Tratamiento de La Materia Prima - G4Document17 pagesTratamiento de La Materia Prima - G4Franss Mera50% (2)
- 20387-IT-MEC-09 Rev.0 MONTAJE Y ALINEAMIENTO TREN DE ACCIONAMIENTO MOL..Document48 pages20387-IT-MEC-09 Rev.0 MONTAJE Y ALINEAMIENTO TREN DE ACCIONAMIENTO MOL..Alfredo MatamalaNo ratings yet
- Codigo de Explosivos NfpaDocument25 pagesCodigo de Explosivos NfpaFranco Garcia100% (2)
- Manual de Normas de Distribución - Elektra NoresteDocument55 pagesManual de Normas de Distribución - Elektra NoresteGerman AngelNo ratings yet