You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 00 Transmission LinesDocument329 pages00 Transmission LinesMichael SouropetsisNo ratings yet
- Maestro Full ManualDocument188 pagesMaestro Full ManualTravis MuiNo ratings yet
- VB Tutorial-Connect VB Application With MS Access Through CodingDocument19 pagesVB Tutorial-Connect VB Application With MS Access Through CodingBeschiAntonyD79% (19)
- Change LogDocument5 pagesChange LogPankaj BodheNo ratings yet
- Commit Log v0.7Document8 pagesCommit Log v0.7Pankaj BodheNo ratings yet
- GRBL LogoDocument1 pageGRBL LogoPankaj BodheNo ratings yet
- BE Computer Engineering 2012Document60 pagesBE Computer Engineering 2012Abhijeet Babar0% (1)
- BE Computer Engineering 2012Document60 pagesBE Computer Engineering 2012Abhijeet Babar0% (1)
- Barkoder SDK DatasheetDocument2 pagesBarkoder SDK DatasheetVangelNo ratings yet
- Schuler Electronics Instructor CH14 Electronics ComtrolDocument30 pagesSchuler Electronics Instructor CH14 Electronics ComtrolRíõ EscanillaNo ratings yet
- SF-104474-CD-20 Onload User GuideDocument265 pagesSF-104474-CD-20 Onload User GuideTerryNo ratings yet
- PLC SynopsisDocument5 pagesPLC SynopsisriyaNo ratings yet
- I2C Info - I2C Bus, Interface and ProtocolDocument2 pagesI2C Info - I2C Bus, Interface and ProtocolChakkaravarthiErNo ratings yet
- SKU-GTC-Manual-42004-659L2F (701-902)Document16 pagesSKU-GTC-Manual-42004-659L2F (701-902)Abhishek MasihNo ratings yet
- ECE 4514 Digital Design II Spring 2008 Functions and Tasks: A Language LectureDocument27 pagesECE 4514 Digital Design II Spring 2008 Functions and Tasks: A Language LectureHarold WilsonNo ratings yet
- Debre Tabor University: Network and System AdministrationDocument33 pagesDebre Tabor University: Network and System AdministrationBethelhem YetwaleNo ratings yet
- ABB PCM600 2 12 Release Note 2NGA001541 ENaDocument2 pagesABB PCM600 2 12 Release Note 2NGA001541 ENaquốc đặngNo ratings yet
- Unit 2 Current To VoltageDocument5 pagesUnit 2 Current To VoltageUmaNo ratings yet
- ZMC ManualDocument21 pagesZMC ManualgblackweNo ratings yet
- Types of Messages in HL7Document9 pagesTypes of Messages in HL7learner2284No ratings yet
- UHU Servo Controller 300 enDocument13 pagesUHU Servo Controller 300 enderbalijalelNo ratings yet
- AIQ Core Quickguide (ENG)Document2 pagesAIQ Core Quickguide (ENG)royNo ratings yet
- Resume Raj Kumar SharmaDocument3 pagesResume Raj Kumar SharmaAbhishekNo ratings yet
- Appium Interview Questions Easy & New Updates On MayDocument8 pagesAppium Interview Questions Easy & New Updates On Mayjeffa123No ratings yet
- SSDAC Manual 04 Oct.2013Document162 pagesSSDAC Manual 04 Oct.2013Rahul Priyadarshy100% (2)
- Danload 6000 - Worksheets and SpecificationsDocument16 pagesDanload 6000 - Worksheets and Specificationseschulz78No ratings yet
- Mysql Architecture GuideDocument17 pagesMysql Architecture GuideKramer KramerNo ratings yet
- OAF Interview Questions (For Oracle Application Framework)Document11 pagesOAF Interview Questions (For Oracle Application Framework)smartreeNo ratings yet
- Linear Integrated CircuitsDocument2 pagesLinear Integrated Circuitspandiyarajan142611100% (1)
- ARM COM 2010 11 TacticalRadios-v2Document32 pagesARM COM 2010 11 TacticalRadios-v2maruka33No ratings yet
- Fanuc Pmc-Model Sa1/Sb7 Supplemental Programming Manual (LADDER Language)Document12 pagesFanuc Pmc-Model Sa1/Sb7 Supplemental Programming Manual (LADDER Language)mikeNo ratings yet
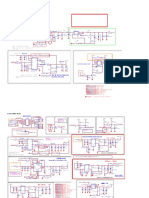
- 715G8709+SSB+ +u708 - U701 Sy8366qnc - U707 Sy8089a - U706 Sy8368q - U705 RT8079ZQ - U710 G5725adj - U702 G5719T - U709 G5725adj - U704 G9661Document2 pages715G8709+SSB+ +u708 - U701 Sy8366qnc - U707 Sy8089a - U706 Sy8368q - U705 RT8079ZQ - U710 G5725adj - U702 G5719T - U709 G5725adj - U704 G9661Jefferson LeiteNo ratings yet
- Half Adder and Full Adder Circuit With Truth TablesDocument12 pagesHalf Adder and Full Adder Circuit With Truth TablesbalajiNo ratings yet
- Nosql in The Enterprise: Sourav MazumderDocument14 pagesNosql in The Enterprise: Sourav MazumderKasey OwensNo ratings yet
- ELE 301: Signals and Systems: Prof. Paul CuffDocument45 pagesELE 301: Signals and Systems: Prof. Paul CuffdioumbNo ratings yet