You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Optimal Control On SO (3) : SO (3) Is Non-Euclidean SpaceDocument2 pagesOptimal Control On SO (3) : SO (3) Is Non-Euclidean SpaceMahmoudAbdulGalilNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Msc/Diploma/Certificate Module Stochastic Simulation Unit 3 - Stochastic IntegralsDocument4 pagesMsc/Diploma/Certificate Module Stochastic Simulation Unit 3 - Stochastic IntegralsMahmoudAbdulGalilNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Performance Bounds For Cooperative Simultaneous Localization and Mapping (C-SLAM)Document8 pagesPerformance Bounds For Cooperative Simultaneous Localization and Mapping (C-SLAM)MahmoudAbdulGalilNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- SGBM: Semi-Global Block Matching: Pixel Matching (Pixel Blocks Matching)Document4 pagesSGBM: Semi-Global Block Matching: Pixel Matching (Pixel Blocks Matching)MahmoudAbdulGalilNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Aly 11 MultipleDocument4 pagesAly 11 MultipleMahmoudAbdulGalilNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- 171001Document2 pages171001vishalsanziraNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Activity Grade 9Document4 pagesActivity Grade 9Rosemarie ItumNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Manual of Metal Bellows - 0441e S 56-77!2!04!10!20 - WebDocument11 pagesManual of Metal Bellows - 0441e S 56-77!2!04!10!20 - Webadfafad gfadfNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Digital ImagingDocument13 pagesDigital ImagingSurya Prakash ThotakuraNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- 18-Division 2-Section 02900 PP Pipelines, Materials, Installation & TestingDocument19 pages18-Division 2-Section 02900 PP Pipelines, Materials, Installation & TestingAvaan IvaanNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Review of Piezoelectric Energy Harvesting Based On VibrationDocument13 pagesA Review of Piezoelectric Energy Harvesting Based On VibrationardnetirarhsimNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
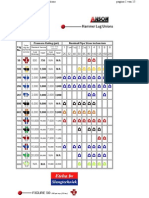
- Hamerlug Unions (Anson)Document15 pagesHamerlug Unions (Anson)Leonardo ViannaNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Payable Salary Paid SalaryDocument2 pagesPayable Salary Paid SalaryAhmed AmmanNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Revista Domus 771Document10 pagesRevista Domus 771Claudia TecuceanuNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Grade 7 Mixtures and Solutions Full ReviewDocument28 pagesGrade 7 Mixtures and Solutions Full Reviewblackcat657No ratings yet
- CBSE Class 10th and 12th Cemistry Project-Practical and Study NotesDocument3 pagesCBSE Class 10th and 12th Cemistry Project-Practical and Study NotesGuru60% (10)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 5.2 Production Facilities PDFDocument110 pages5.2 Production Facilities PDFJohn Cooper100% (5)
- Colonial ZF SeriesDocument2 pagesColonial ZF SeriesmndmattNo ratings yet
- CS3205 A8Document10 pagesCS3205 A8Rian BattlaxNo ratings yet
- Nurture Test Series / Joint Package Course: Distance Learning ProgrammeDocument8 pagesNurture Test Series / Joint Package Course: Distance Learning ProgrammeRebanta BeraNo ratings yet
- Tutorial On Structural Analysis Using BEAM Elements of CAEPIPEDocument5 pagesTutorial On Structural Analysis Using BEAM Elements of CAEPIPEFRANCISCONo ratings yet
- Biot-Savart's Law and Ampere's Law: R NQ N/amp/metre (D) R QDocument24 pagesBiot-Savart's Law and Ampere's Law: R NQ N/amp/metre (D) R Qashok pradhanNo ratings yet
- Prismic R10: Product SpecificationDocument2 pagesPrismic R10: Product SpecificationParag HemkeNo ratings yet
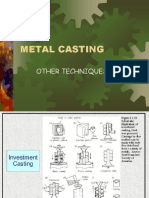
- Prosprod I Casting Process (2) - Part2 PDFDocument36 pagesProsprod I Casting Process (2) - Part2 PDFPandu WibowoNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- GWR As RLI For Boiler Drum LevelDocument14 pagesGWR As RLI For Boiler Drum LevelRoger SeaverNo ratings yet
- Distance DisplacementDocument4 pagesDistance DisplacementRuchi Briam James LagitnayNo ratings yet
- DKD-R - 6-1 2014Document39 pagesDKD-R - 6-1 2014japofff100% (1)
- Radial Distribution Function For Argon Calculations From Thermodynamic Properties andDocument11 pagesRadial Distribution Function For Argon Calculations From Thermodynamic Properties andrafelNo ratings yet
- Indoor Ballistic Test Ranges For Small Arms and Fragmentation Testing of Ballistic-Resistant ItemsDocument4 pagesIndoor Ballistic Test Ranges For Small Arms and Fragmentation Testing of Ballistic-Resistant ItemsAlevj DbNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Sheet Pile Wall IntroductionDocument19 pagesSheet Pile Wall IntroductionSâu HeoNo ratings yet
- Experimental and Numerical Analysis of Steel and Fiber-Reinforced Polymer Concrete Beams Under Transverse LoadDocument14 pagesExperimental and Numerical Analysis of Steel and Fiber-Reinforced Polymer Concrete Beams Under Transverse LoadErnie SitanggangNo ratings yet
- GuidelinesDocument15 pagesGuidelinesKenn Fabre0% (1)
- Kepler ConjectureDocument6 pagesKepler Conjecturechazzyjazzy11No ratings yet
- Analytical Chemistry Basic ConceptsDocument12 pagesAnalytical Chemistry Basic ConceptsNino Jay FabrosNo ratings yet
- Disentangling Classical and Bayesian Approaches To Uncertainty AnalysisDocument19 pagesDisentangling Classical and Bayesian Approaches To Uncertainty Analysiszilangamba_s4535No ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)