You might also like
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1From EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Rating: 4.5 out of 5 stars4.5/5 (3)
- DTMF Receiver For Telephones: BU8874 / BU8874FDocument10 pagesDTMF Receiver For Telephones: BU8874 / BU8874FYazan HaidarNo ratings yet
- Gate Driver For N-Channel Mosfet: Experiment 6Document34 pagesGate Driver For N-Channel Mosfet: Experiment 6Noona MigleiNo ratings yet
- Sherwood RX-4105bDocument23 pagesSherwood RX-4105bGilberto0% (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Laser Guided Door OpenerDocument9 pagesLaser Guided Door Openersekhar469No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
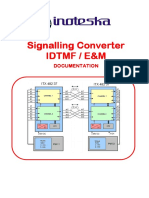
- Signalling Converter Signalling Converter Signalling Converter Signalling Converter Idtmf / E&M Idtmf / E&M Idtmf / E&M Idtmf / E&MDocument15 pagesSignalling Converter Signalling Converter Signalling Converter Signalling Converter Idtmf / E&M Idtmf / E&M Idtmf / E&M Idtmf / E&MArmanul HaqueNo ratings yet
- Energy Metering Ic With Pulse Output: DescriptionDocument7 pagesEnergy Metering Ic With Pulse Output: DescriptionvungocduongNo ratings yet
- Samsung Plasma Training ManualDocument57 pagesSamsung Plasma Training ManualDamiao100% (1)
- Samsung Plasma Training ManualDocument57 pagesSamsung Plasma Training ManualevaristoNo ratings yet
- Commnication-Lab Manual EceDocument46 pagesCommnication-Lab Manual EceSudeepa BgspNo ratings yet
- Sua909 PDFDocument61 pagesSua909 PDFgabrielvadNo ratings yet
- VCO Produces Positive and Negative Output Frequencies PDFDocument4 pagesVCO Produces Positive and Negative Output Frequencies PDFagmnm1962100% (1)
- Li-Fi Industries Communication Using Laser Media in Open SpaceDocument61 pagesLi-Fi Industries Communication Using Laser Media in Open SpaceVinothKumar100% (1)
- AEC Manual 2018-2019Document99 pagesAEC Manual 2018-2019Raza SikandarNo ratings yet
- Data Sheet: Self Tuned Radio (STR)Document32 pagesData Sheet: Self Tuned Radio (STR)Paulo SampaioNo ratings yet
- An 477Document28 pagesAn 477radaresNo ratings yet
- Current Mode PWM Controller Az3842/3/4/5Document13 pagesCurrent Mode PWM Controller Az3842/3/4/5Emmanuel ZambranoNo ratings yet
- Remote Controlled Fan RegulatorDocument23 pagesRemote Controlled Fan RegulatorPradeep100% (5)
- AN-1252 Application Note: How To Configure TheDocument12 pagesAN-1252 Application Note: How To Configure Thenguyen thuanNo ratings yet
- Block Diagram For Simple Traffic Light SystemDocument17 pagesBlock Diagram For Simple Traffic Light SystemVishwaraj Bhagwat88% (16)
- Infrared Remote Control Receiver Module IRM-2638T: FeaturesDocument10 pagesInfrared Remote Control Receiver Module IRM-2638T: FeaturesDaniel Nicolae CiufudeanNo ratings yet
- UC3843 ChipsWinnerDocument11 pagesUC3843 ChipsWinnerPareNo ratings yet
- UC3848Document9 pagesUC3848Sergio Daniel BarretoNo ratings yet
- Bandlimiting and Restoring Digital Signals (1) VDocument10 pagesBandlimiting and Restoring Digital Signals (1) VKavindu Ransara MudaligeNo ratings yet
- TA8251AH: Max Power 30W BTL × 4ch Audio Power ICDocument13 pagesTA8251AH: Max Power 30W BTL × 4ch Audio Power ICРамиль Невмянов100% (1)
- Exp 1 Digital CommunicationDocument8 pagesExp 1 Digital CommunicationMohammedNo ratings yet
- RP108J Series: Low Input Voltage 3A LDO Regulator OutlineDocument29 pagesRP108J Series: Low Input Voltage 3A LDO Regulator OutlineArie DinataNo ratings yet
- An3007 PDFDocument8 pagesAn3007 PDFJuan FelipeNo ratings yet
- Seatel Vsat ArbitratorDocument10 pagesSeatel Vsat ArbitratorFlavioNo ratings yet
- Alinco DR-M03SX - 06TH Service ManualDocument42 pagesAlinco DR-M03SX - 06TH Service ManualYayok S. AnggoroNo ratings yet
- III.B.TECH-I-SEM - AC LAB HHJDocument95 pagesIII.B.TECH-I-SEM - AC LAB HHJ2VD17EC 054No ratings yet
- Prensa Slua601Document29 pagesPrensa Slua601Miguelina RossiNo ratings yet
- SXP3101 L2 A 2Document21 pagesSXP3101 L2 A 2Alberto José Escalona PiñeroNo ratings yet
- مختبر الدوائر الاردن PDFDocument43 pagesمختبر الدوائر الاردن PDFMarwan M MuharramNo ratings yet
- RPM7100 IR Phototransistor Series - DSDocument9 pagesRPM7100 IR Phototransistor Series - DSjmarrero_3No ratings yet
- IRM8601Document9 pagesIRM8601Oprina MonicaNo ratings yet
- Technics Su-A707 (ET)Document62 pagesTechnics Su-A707 (ET)MirceaNo ratings yet
- Uni and Bipolar Hall EffectDocument16 pagesUni and Bipolar Hall Effectkishan1234No ratings yet
- Everlight Electronics Co., LTDDocument8 pagesEverlight Electronics Co., LTDjoelpalzaNo ratings yet
- CLC5957 12-Bit, 70 MSPS Broadband Monolithic A/D Converter: General Description FeaturesDocument16 pagesCLC5957 12-Bit, 70 MSPS Broadband Monolithic A/D Converter: General Description FeaturesPeter SolyomNo ratings yet
- Service Manual Chassis 3P1 5: Design and Specifications Are Subject To Change Without Prior Notice. (Only Referrence)Document35 pagesService Manual Chassis 3P1 5: Design and Specifications Are Subject To Change Without Prior Notice. (Only Referrence)marcellobbNo ratings yet
- PresentationDocument44 pagesPresentationRohit chachdaNo ratings yet
- Bfu540 PhilipsDocument17 pagesBfu540 PhilipsBsm GwapuNo ratings yet
- Color TV China Circuit Diagram TCL Chassis M113Document9 pagesColor TV China Circuit Diagram TCL Chassis M113Gary Nugas100% (1)
- Magtek 6516Document2 pagesMagtek 6516Tecnicos SlotsNo ratings yet
- Pistola Estroboscópica SAMDocument16 pagesPistola Estroboscópica SAMaudioimagenNo ratings yet
- Ferrule &wiring PDFDocument26 pagesFerrule &wiring PDFjazbiqdr9No ratings yet
- CR1 Z7 ManualDocument12 pagesCR1 Z7 ManualJosue crisostomoNo ratings yet
- General Description: DMB TechnologyDocument11 pagesGeneral Description: DMB Technologyjsalinas78No ratings yet
- Infrared Object CounterDocument9 pagesInfrared Object CounterMohideen NazimNo ratings yet
- EM4100 DatasheetDocument9 pagesEM4100 DatasheetAlaa MNo ratings yet
- Mains Failure Indicator AlarmDocument33 pagesMains Failure Indicator AlarmamolNo ratings yet
- Laboratory Manual: Department of Electronics & Telecommunication EngineeringDocument37 pagesLaboratory Manual: Department of Electronics & Telecommunication Engineeringsouled oneNo ratings yet
- 1.25Gbps SFP Bi-Directional Transceiver, 20km Reach: GLCBXDDocument9 pages1.25Gbps SFP Bi-Directional Transceiver, 20km Reach: GLCBXDtv_romeoNo ratings yet
- Receptor UHF T5743P6Document41 pagesReceptor UHF T5743P6Jorge Martinez PerezNo ratings yet
- DPX-1 Self Powered Relay: Areva T&DDocument12 pagesDPX-1 Self Powered Relay: Areva T&Dરામ પ્રતાપNo ratings yet
- Stepping Into Leadership: Unlock Your Full Leadership PotentialDocument16 pagesStepping Into Leadership: Unlock Your Full Leadership Potential1553No ratings yet
- 5 04assesDocument10 pages5 04asses1553No ratings yet
- 17 +Extracting+BitsDocument1 page17 +Extracting+Bits1553No ratings yet
- Register AccessDocument12 pagesRegister Access1553No ratings yet
- Unit V1Document106 pagesUnit V11553No ratings yet
- Standard LCD Module MC4004-01 Outline Dimension: Mechanical SpecificationDocument1 pageStandard LCD Module MC4004-01 Outline Dimension: Mechanical Specification1553No ratings yet
- AWT Components: Simple User Interfaces: For Live Java-Related TrainingDocument32 pagesAWT Components: Simple User Interfaces: For Live Java-Related Training1553No ratings yet
- How To Write in Plain EnglishDocument11 pagesHow To Write in Plain EnglishEduardo FerreiraNo ratings yet
- NMEA Software Standard: Parameter Description $ ID MSG, DN CS (CR) (LF)Document35 pagesNMEA Software Standard: Parameter Description $ ID MSG, DN CS (CR) (LF)1553No ratings yet
- SN 65 Hvs 885Document28 pagesSN 65 Hvs 8851553No ratings yet
- Ppts FinalDocument223 pagesPpts Final1553No ratings yet
- Everyday Practical Electronics - August 2016Document77 pagesEveryday Practical Electronics - August 20161553No ratings yet
- LEA-5H, LEA-5S, LEA-5A U-Blox 5 GPS and GALILEO Modules: Data SheetDocument15 pagesLEA-5H, LEA-5S, LEA-5A U-Blox 5 GPS and GALILEO Modules: Data Sheet1553No ratings yet
- 1.2 INCH (30.5mm) 5 X 7 Dot Matrix Stick Display: Superbright Red GMA8275C Superbright Red GMC8275CDocument7 pages1.2 INCH (30.5mm) 5 X 7 Dot Matrix Stick Display: Superbright Red GMA8275C Superbright Red GMC8275C1553No ratings yet
- An Overview To Soft-Switching Boost Converters For PhotovoltaicDocument4 pagesAn Overview To Soft-Switching Boost Converters For Photovoltaic1553No ratings yet
- CSE P567 - Winter 2010 Lab 6/homework 6 - Getting Started With The Arduino BoardDocument4 pagesCSE P567 - Winter 2010 Lab 6/homework 6 - Getting Started With The Arduino Board1553No ratings yet
- FFT Computation For Butterfly Unit Using Verilog HDLDocument4 pagesFFT Computation For Butterfly Unit Using Verilog HDLGRD JournalsNo ratings yet
- Protective Relaying Lecture - 2 - EditedDocument127 pagesProtective Relaying Lecture - 2 - EditedRaush100% (1)
- Introduction To DSP: Example: Audio Signal Reconstruction in CdsDocument2 pagesIntroduction To DSP: Example: Audio Signal Reconstruction in Cdslinhnt101No ratings yet
- Compressive Sensing Based Algorithms For Electronic DefenceDocument188 pagesCompressive Sensing Based Algorithms For Electronic DefenceAnonymous qdJOxstNo ratings yet
- Electrical Engineering 2015 AdmissionDocument38 pagesElectrical Engineering 2015 AdmissionalokNo ratings yet
- Booth RecodingDocument3 pagesBooth RecodingJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- Pyramid and Pyramid BlendingDocument8 pagesPyramid and Pyramid Blendingyamiewon100% (1)
- DRN v. Herbert - BriefDocument41 pagesDRN v. Herbert - Briefmishkin_listNo ratings yet
- E051022529 PDFDocument5 pagesE051022529 PDFPrajwal V RNo ratings yet
- Dealing With PLL Clock Jitter in Advanced Processor DesignsDocument5 pagesDealing With PLL Clock Jitter in Advanced Processor DesignsrobduronNo ratings yet
- What's The Difference Between Raster and Vector - ResourcesDocument6 pagesWhat's The Difference Between Raster and Vector - ResourcesPavan KumarNo ratings yet
- EC3492 - DIGITAL SIGNAL PROCESSING-923183941-question Bank DSP 21 RegDocument17 pagesEC3492 - DIGITAL SIGNAL PROCESSING-923183941-question Bank DSP 21 Reggunasekaran kNo ratings yet
- UG 3-2 ECE R16-SyllabusDocument26 pagesUG 3-2 ECE R16-Syllabuschandra kiranNo ratings yet
- Digital Image Processing: InterpolationDocument8 pagesDigital Image Processing: InterpolationfuxailNo ratings yet
- Image Enhancement PPT-2Document28 pagesImage Enhancement PPT-2salution technologyNo ratings yet
- IV-1 DSP Lab ManualDocument123 pagesIV-1 DSP Lab ManualVijayalaxmi Biradar100% (15)
- Lab Based Project ReportDocument40 pagesLab Based Project ReportNagulmeera ShaikNo ratings yet
- Adaptive FiltersDocument23 pagesAdaptive FilterskimNo ratings yet
- Unit 1Document175 pagesUnit 1Karthikeya SharmaNo ratings yet
- 47 Vol 6 No 2Document5 pages47 Vol 6 No 2ganeshNo ratings yet
- DSP Lecture PlanDocument5 pagesDSP Lecture PlanRAPETI SAI KUMAR (N160490)No ratings yet
- M.tech Electronics Telecommunication EngineeringDocument75 pagesM.tech Electronics Telecommunication EngineeringSudhirkumar DhotreNo ratings yet
- Allprob 08 N 2Document11 pagesAllprob 08 N 2Tina GuptaNo ratings yet
- DSP- הרצאה 3 - DFT התמרת פורייה בדידהDocument16 pagesDSP- הרצאה 3 - DFT התמרת פורייה בדידהRonNo ratings yet
- ADSPDocument2 pagesADSPRajaa KrishnamurthyNo ratings yet
- Blending Modes For Digital ArtistsDocument1 pageBlending Modes For Digital ArtistsRobert SmoothopNo ratings yet
- LAB MANUAL of DSP-3105Document15 pagesLAB MANUAL of DSP-3105Eayashen ArafatNo ratings yet
- Single Image Haze Removal Using Dark Channel Prior參考Document59 pagesSingle Image Haze Removal Using Dark Channel Prior參考Yin-Chieh LiNo ratings yet
- Digital Signal Processing QUESTION BANKDocument5 pagesDigital Signal Processing QUESTION BANKSaran SekaranNo ratings yet
- Assignment 2 Img PDFDocument7 pagesAssignment 2 Img PDFUtkrisht KashyapNo ratings yet