You might also like
- Multivariable Control SystemDocument39 pagesMultivariable Control SystemAmeerRashidNo ratings yet
- ProcessDocument38 pagesProcessVaidh Prakash ChoudharyNo ratings yet
- Control of Multiple-Input, Multiple-Output ProcessesDocument38 pagesControl of Multiple-Input, Multiple-Output ProcessespraveenmandeNo ratings yet
- Control of Multiple-Input, Multiple-Output ProcessesDocument27 pagesControl of Multiple-Input, Multiple-Output Processesmeseret sisayNo ratings yet
- Chapter 18Document31 pagesChapter 18Mahmoud ElsisiNo ratings yet
- Control of Multiple-Input, Multiple-Output ProcessesDocument38 pagesControl of Multiple-Input, Multiple-Output ProcessesdhineshpNo ratings yet
- 72815Document79 pages72815Ayyar KandasamyNo ratings yet
- Control of Multiple-Input, Multiple-Output (MIMO) ProcessesDocument38 pagesControl of Multiple-Input, Multiple-Output (MIMO) Processessalvador2meNo ratings yet
- Ei6801 - Computer Control of Process Part-A Answer All Questions (5x2 10)Document7 pagesEi6801 - Computer Control of Process Part-A Answer All Questions (5x2 10)Anonymous yO7rcec6vuNo ratings yet
- Chapter - 3 MKK1263 NH STDDocument36 pagesChapter - 3 MKK1263 NH STDBhinitha ChandrasagaranNo ratings yet
- Multiloop and Multivariable Control PDFDocument43 pagesMultiloop and Multivariable Control PDFVaibhav AhujaNo ratings yet
- IJIREEICE8 s9 Pradeep MIMO-PID Controller For 3 Area Power SystemDocument4 pagesIJIREEICE8 s9 Pradeep MIMO-PID Controller For 3 Area Power SystemPradeepKumarMallemNo ratings yet
- Interaction in Two-Variable Control Distillation Columns - IDocument14 pagesInteraction in Two-Variable Control Distillation Columns - IVardhan KaushikNo ratings yet
- Fuzzy Self Tuning of PID Controller For Multivariable ProcessDocument5 pagesFuzzy Self Tuning of PID Controller For Multivariable ProcessJournal of ComputingNo ratings yet
- Design of Controller Using Variable Transformations For A Two Tank Conical Interacting Level SystemsDocument6 pagesDesign of Controller Using Variable Transformations For A Two Tank Conical Interacting Level SystemsAbii BaluuNo ratings yet
- Chapter 16 ModifiedDocument43 pagesChapter 16 ModifiedShoukatNo ratings yet
- Cascaded PIDDocument14 pagesCascaded PIDTatenda BizureNo ratings yet
- CH 16 (1-27-05) PDFDocument29 pagesCH 16 (1-27-05) PDFDavid AlexanderNo ratings yet
- Enhanced Single-Loop Control StrategiesDocument29 pagesEnhanced Single-Loop Control StrategiesAsk EthiopiaNo ratings yet
- Enhanced Single-Loop Control StrategiesDocument26 pagesEnhanced Single-Loop Control Strategiesmeseret sisay100% (1)
- Feedback Control PID Control: HadiyantoDocument64 pagesFeedback Control PID Control: HadiyantoNuzul RamadhaniNo ratings yet
- RgaDocument19 pagesRgaGesang Rakhmad UtomoNo ratings yet
- CHAPTER 3 Gas Absorption Lec-4Document25 pagesCHAPTER 3 Gas Absorption Lec-4Sata AjjamNo ratings yet
- CH 16 (1-27-05)Document29 pagesCH 16 (1-27-05)David AlexanderNo ratings yet
- Assignment 8 2020 SolutionDocument2 pagesAssignment 8 2020 SolutionAmal GSNo ratings yet
- FY Eng PDFDocument36 pagesFY Eng PDFCarraan Dandeettirra Caala AltakkatakkaNo ratings yet
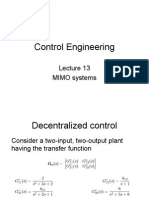
- Control Engineering: MIMO SystemsDocument26 pagesControl Engineering: MIMO SystemsPisicuta LaviniaNo ratings yet
- Decoupling Control Schemes of Multivariable Systems (多变量系统的解耦控制)Document32 pagesDecoupling Control Schemes of Multivariable Systems (多变量系统的解耦控制)Waqas KianiNo ratings yet
- Stability Control of Double Inverted Pendulum On A Cart Using Full State Feedback With H Infinity and H 2 ControllersDocument14 pagesStability Control of Double Inverted Pendulum On A Cart Using Full State Feedback With H Infinity and H 2 Controllersمحمد المهندسNo ratings yet
- Problem Nº1.: S G K G K S SDocument4 pagesProblem Nº1.: S G K G K S SalexandraNo ratings yet
- Controller Tuning: CHME 624 Advance Process Dynamic Modelling & ControlDocument15 pagesController Tuning: CHME 624 Advance Process Dynamic Modelling & Controlali aljifriNo ratings yet
- Stability and Plant WideDocument150 pagesStability and Plant WideAlifDzakiNo ratings yet
- CHAPTER 3 Gas Absorption Lec-4Document25 pagesCHAPTER 3 Gas Absorption Lec-4Sata AjjamNo ratings yet
- Hazari Ka 2014Document10 pagesHazari Ka 2014Sidhant SharanNo ratings yet
- Week 4 Assignment 1 SolutionDocument10 pagesWeek 4 Assignment 1 Solutionkirankuma.jagtapNo ratings yet
- Worksheet 10Document3 pagesWorksheet 10rahmat qambariNo ratings yet
- Chap3-First Law of ThermodynamicsDocument59 pagesChap3-First Law of ThermodynamicsAyalew TamiruNo ratings yet
- Computer Control of ProcessDocument29 pagesComputer Control of ProcessArjun NandyNo ratings yet
- DMCDocument27 pagesDMCReynanBorliniNo ratings yet
- PID-Fuzzy Controller For Grate Cooler in Cement PlantDocument5 pagesPID-Fuzzy Controller For Grate Cooler in Cement PlantamirNo ratings yet
- Group-1: Multivariable Control ProcessDocument24 pagesGroup-1: Multivariable Control ProcessSamuel AdamuNo ratings yet
- Automatic Control Systems TheoryDocument9 pagesAutomatic Control Systems TheoryJames KabugoNo ratings yet
- CHAPTER 12: Controller Design, Tuning, & Troubleshooting: Anis Atikah Ahmad Anisatikah@unimap - Edu.myDocument65 pagesCHAPTER 12: Controller Design, Tuning, & Troubleshooting: Anis Atikah Ahmad Anisatikah@unimap - Edu.myhakita86No ratings yet
- Control Chapter07 - GearTeamDocument71 pagesControl Chapter07 - GearTeamNabilaSalsaNo ratings yet
- Controller Tuning: A Motivational ExampleDocument65 pagesController Tuning: A Motivational ExamplealiNo ratings yet
- 2002 - Kwakernaak - H2-OPTIMIZATION - THEORY AND APPLICATIONS TO ROBUST CONTROL DESIGN PDFDocument12 pages2002 - Kwakernaak - H2-OPTIMIZATION - THEORY AND APPLICATIONS TO ROBUST CONTROL DESIGN PDFAyman IsmailNo ratings yet
- The Blend Station A New Ratio Control StructureDocument6 pagesThe Blend Station A New Ratio Control StructureBOMBE45No ratings yet
- Online Control Lecture #1Document47 pagesOnline Control Lecture #1Noor GamingNo ratings yet
- Chapter 12 PID Control Design and Tuning BDocument35 pagesChapter 12 PID Control Design and Tuning BZay Nthuu Coco ShabrinaNo ratings yet
- Two Liquid Tanks Control: January 2008Document11 pagesTwo Liquid Tanks Control: January 2008aziz DeganiNo ratings yet
- EET302 M4-Ktunotes - inDocument29 pagesEET302 M4-Ktunotes - inAkhilaNo ratings yet
- Tr-Cse-04-006Document15 pagesTr-Cse-04-006Sebastian ReyesNo ratings yet
- Automatic Tuning of Pid Controller Using Fuzzy LogicDocument8 pagesAutomatic Tuning of Pid Controller Using Fuzzy LogicKha BùiNo ratings yet
- Process Control Seborg LectureDocument58 pagesProcess Control Seborg LectureTanvir AhmedNo ratings yet
- Design of Static and Dynamic DecouplerDocument6 pagesDesign of Static and Dynamic DecouplerAli AlmisbahNo ratings yet
- Example (1) : The Interaction of Control Loops in A Stirred Tank HeaterDocument30 pagesExample (1) : The Interaction of Control Loops in A Stirred Tank HeaterCupa no DensetsuNo ratings yet
- PID Controller Design, Tuning and TroubleshootingDocument19 pagesPID Controller Design, Tuning and TroubleshootingAmy MillerNo ratings yet
- Correlations For LiquidDocument5 pagesCorrelations For LiquidElmer HernandezNo ratings yet
- Topics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationFrom EverandTopics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationNo ratings yet
- Transistor Switching and Sequential CircuitsFrom EverandTransistor Switching and Sequential CircuitsRating: 5 out of 5 stars5/5 (1)
- Oil 2014 3 238 249 PDFDocument12 pagesOil 2014 3 238 249 PDFFatin FatehaNo ratings yet
- Chapter 3 - Flow of Compressible FluidsDocument38 pagesChapter 3 - Flow of Compressible FluidsFatin FatehaNo ratings yet
- Time Delay Compensation PDFDocument12 pagesTime Delay Compensation PDFMuhammad AffifudinNo ratings yet
- Fatal InjuriesDocument13 pagesFatal InjuriesFatin FatehaNo ratings yet
- Che692 - Process Modelling and Simulation: Online ExamplesDocument11 pagesChe692 - Process Modelling and Simulation: Online ExamplesFatin FatehaNo ratings yet
- CHP 3 PDFDocument30 pagesCHP 3 PDFFatin FatehaNo ratings yet
- Tracer Experiment in Plug Flow ReactorDocument6 pagesTracer Experiment in Plug Flow ReactorAfrillia FahrinaNo ratings yet
- Week 1 - TutorialsDocument14 pagesWeek 1 - Tutorialsfatthul hadiNo ratings yet
- Residence Time DistributionDocument8 pagesResidence Time DistributionMirul AminudinNo ratings yet
- Drinking Water Quality Surveillance Programme - Ministry of HealthDocument3 pagesDrinking Water Quality Surveillance Programme - Ministry of HealthFatin FatehaNo ratings yet
- Microscopic System: Prepared By: Lim Ying Pei FKK, Uitm Shah AlamDocument12 pagesMicroscopic System: Prepared By: Lim Ying Pei FKK, Uitm Shah AlamFatin FatehaNo ratings yet
- FM42 - Complete ManualDocument27 pagesFM42 - Complete ManualFatin FatehaNo ratings yet
- Oil 2014 3 238 249Document12 pagesOil 2014 3 238 249Fatin FatehaNo ratings yet
- CHP 3 PDFDocument30 pagesCHP 3 PDFFatin FatehaNo ratings yet
- Drinking Water Quality Surveillance Programme - Ministry of HealthDocument3 pagesDrinking Water Quality Surveillance Programme - Ministry of HealthFatin FatehaNo ratings yet
- Tracer Experiment in Plug Flow ReactorDocument6 pagesTracer Experiment in Plug Flow ReactorAfrillia FahrinaNo ratings yet
- 5 - Instrumentation - ValveDocument14 pages5 - Instrumentation - ValveFatin FatehaNo ratings yet
- Basic Water Properties 2 ExperimentDocument16 pagesBasic Water Properties 2 ExperimentFatin FatehaNo ratings yet
- Chapter 3 - Flow of Compressible FluidsDocument38 pagesChapter 3 - Flow of Compressible FluidsFatin FatehaNo ratings yet
- Chapter 2 - CHE503 - Part 2Document17 pagesChapter 2 - CHE503 - Part 2Fatin FatehaNo ratings yet
- Name: Student No.: Group: Experiment: Date Performed: Semester: Programme / Code: Submit ToDocument1 pageName: Student No.: Group: Experiment: Date Performed: Semester: Programme / Code: Submit ToJaja TeukieNo ratings yet
- Name: Student No.: Group: Experiment: Date Performed: Semester: Programme / Code: Submit ToDocument1 pageName: Student No.: Group: Experiment: Date Performed: Semester: Programme / Code: Submit ToJaja TeukieNo ratings yet
- AbstractDocument7 pagesAbstractFatin FatehaNo ratings yet
- 6conclusion and RecommendationsDocument3 pages6conclusion and RecommendationsFatin FatehaNo ratings yet
- Safety Briefing ModulesDocument94 pagesSafety Briefing ModulesFaTin AziEyatiNo ratings yet
- General Operating Procedures: Exp/Gas AbsorptionDocument4 pagesGeneral Operating Procedures: Exp/Gas AbsorptionMohd Hisyamuddin Mohd AminudinNo ratings yet
- Lab ReportDocument10 pagesLab ReportFatin Fateha71% (7)
- The Key To Super Consciousness Chapter 1Document6 pagesThe Key To Super Consciousness Chapter 1Will FortuneNo ratings yet
- TemptDocument13 pagesTemptJhun Lerry TayanNo ratings yet
- HCLDocument8 pagesHCLlalit shakhaNo ratings yet
- 1 - SetsDocument2 pages1 - SetsHerald MulanoNo ratings yet
- PERSIAN PROBABILITY FUNCTION For Helping Users Understand Statistical ModelsDocument35 pagesPERSIAN PROBABILITY FUNCTION For Helping Users Understand Statistical ModelsNicola ChieffoNo ratings yet
- Sleipner A - North Sea Oil Platform CollapseDocument28 pagesSleipner A - North Sea Oil Platform Collapsemacynthia26No ratings yet
- Electronics MCQsDocument17 pagesElectronics MCQslovelyosmile253No ratings yet
- Radiometric CorrectionDocument32 pagesRadiometric CorrectionOluwafemi Opaleye100% (1)
- Structural Imperfections (Defects) in Crystalline Solids: These Lecture Notes Are Taken From METU CE241 ClassDocument23 pagesStructural Imperfections (Defects) in Crystalline Solids: These Lecture Notes Are Taken From METU CE241 Classvamps sierNo ratings yet
- CNC Machine Tools and Control SystemsDocument39 pagesCNC Machine Tools and Control Systemsp_a_jeevaNo ratings yet
- Sajb 411952 969Document18 pagesSajb 411952 969samirNo ratings yet
- Fatigue Crack Growth Analysis of A FilletDocument7 pagesFatigue Crack Growth Analysis of A FilletPhilip IannaNo ratings yet
- Calculating The Heating Value of BiogasDocument5 pagesCalculating The Heating Value of BiogasAnonymous MVHQ97KEoPNo ratings yet
- Wave Motion Demonstrator: Instruction ManualDocument17 pagesWave Motion Demonstrator: Instruction ManualScience HouseNo ratings yet
- Dry Room in Battery PlantDocument36 pagesDry Room in Battery Plantcostas matsangosNo ratings yet
- Arfken Solutions Manual 7th Ed PDFDocument524 pagesArfken Solutions Manual 7th Ed PDFBolaybalam84% (77)
- Problem SetDocument2 pagesProblem SetCrystal DimaanoNo ratings yet
- Asymptotes Tutorial: Horizontal Vertical Slant and HolesDocument30 pagesAsymptotes Tutorial: Horizontal Vertical Slant and Holesgregory_k_sherman100% (1)
- Niosh Lift Push PullDocument15 pagesNiosh Lift Push Pullahuan huanNo ratings yet
- Construction Site Earthwork CalculationDocument4 pagesConstruction Site Earthwork CalculationmasteriragaNo ratings yet
- Thermal Stress MonitoringDocument78 pagesThermal Stress MonitoringSIVA KAVYANo ratings yet
- History of MaichewDocument2 pagesHistory of MaichewSehabom Geberhiwot100% (1)
- Formulas For Physics 1Document7 pagesFormulas For Physics 1thejesterraceNo ratings yet
- 17 Capacitors and Inductors in AC CircuitsDocument12 pages17 Capacitors and Inductors in AC CircuitsAbhijit PattnaikNo ratings yet
- Question Bank DSP (Unit III, IV, VDocument8 pagesQuestion Bank DSP (Unit III, IV, VJahnavi Chowdary0% (1)
- F ChartDocument7 pagesF Charthemal4379No ratings yet
- Tutorial Sheet (ME324) 2018-19Document1 pageTutorial Sheet (ME324) 2018-19Asif SadarNo ratings yet
- 05 PDFDocument1 page05 PDFdruwid6No ratings yet
- Multi Meter Triplett 630-NA Tested by ZS1JHGDocument2 pagesMulti Meter Triplett 630-NA Tested by ZS1JHGJohn Howard GreenNo ratings yet
- Prefixes and SuffixesDocument15 pagesPrefixes and SuffixesRita Otero100% (1)