You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Keyboard Shortcuts GuideDocument15 pagesKeyboard Shortcuts GuidemohanNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Bishop Owen - Exploring ForthDocument183 pagesBishop Owen - Exploring ForthbcflyersNo ratings yet
- SeleniumDocument284 pagesSeleniumNheb Naares Nheb NaareesNo ratings yet
- Chatgpt SlidesDocument112 pagesChatgpt SlidesmkranthikumarmcaNo ratings yet
- 80-1/8 Inch Scale J-3 Piper Cub Assembly ManualDocument44 pages80-1/8 Inch Scale J-3 Piper Cub Assembly ManualMohamed MansourNo ratings yet
- SQL Fundamentals for Database Design and Data RetrievalDocument11 pagesSQL Fundamentals for Database Design and Data RetrievalSan DeepNo ratings yet
- Uav 1Document130 pagesUav 1Tufel NooraniNo ratings yet
- Wbest03 Union AirDocument3 pagesWbest03 Union AirMohamed MansourNo ratings yet
- Wbest03 Save ItDocument2 pagesWbest03 Save ItMohamed MansourNo ratings yet
- Wbest04 WyndorDocument2 pagesWbest04 WyndorMohamed MansourNo ratings yet
- 381 BorshDocument23 pages381 BorshMohamed MansourNo ratings yet
- Aiaa 2010 4224 PDFDocument14 pagesAiaa 2010 4224 PDFMohamed MansourNo ratings yet
- Priority Rules IJPE2010Document17 pagesPriority Rules IJPE2010Mohamed MansourNo ratings yet
- Resource Constrained Multi-Project Scheduling With Priority Rules & Analytic Hierarchy ProcessDocument10 pagesResource Constrained Multi-Project Scheduling With Priority Rules & Analytic Hierarchy ProcessMohamed MansourNo ratings yet
- Intro Sal 2 Assignment 1Document15 pagesIntro Sal 2 Assignment 1Mohamed MansourNo ratings yet
- 026 - Chapter 5 - L19 - (03-10-2013) PDFDocument14 pages026 - Chapter 5 - L19 - (03-10-2013) PDFMohamed MansourNo ratings yet
- CATIA Sheet Metal DesignDocument26 pagesCATIA Sheet Metal DesignGokul PrabuNo ratings yet
- Research On 3D Parametric Modeling Technology of Template Parts Based On CatiaDocument7 pagesResearch On 3D Parametric Modeling Technology of Template Parts Based On CatiaMohamed MansourNo ratings yet
- 10 1 1 378 284Document6 pages10 1 1 378 284Mohamed MansourNo ratings yet
- Gen Naca Sym.mDocument1 pageGen Naca Sym.mMohamed MansourNo ratings yet
- InventoryDocument3 pagesInventoryMohamed MansourNo ratings yet
- Structural Optimization in CAD Software Using FEMDocument6 pagesStructural Optimization in CAD Software Using FEMMohamed MansourNo ratings yet
- 15-02319erik OlofssonRapportDocument64 pages15-02319erik OlofssonRapportMohamed MansourNo ratings yet
- 92009Document60 pages92009Mohamed MansourNo ratings yet
- Bertilsson Et Al 2011 Multidimensional Consideration of Anthropometric DiversityDocument6 pagesBertilsson Et Al 2011 Multidimensional Consideration of Anthropometric DiversityMohamed MansourNo ratings yet
- Structural Optimization in CAD Software Using FEMDocument6 pagesStructural Optimization in CAD Software Using FEMMohamed MansourNo ratings yet
- 6 336 1048 1 LE Ok ImportanttttttttttttttttttttttttttDocument14 pages6 336 1048 1 LE Ok ImportanttttttttttttttttttttttttttMohamed MansourNo ratings yet
- Catia Fem TutorialDocument21 pagesCatia Fem TutorialnicolassaltarNo ratings yet
- 29 ProductDocument26 pages29 ProductMohamed MansourNo ratings yet
- College TimetablingDocument4,241 pagesCollege TimetablingMohamed MansourNo ratings yet
- Business PlanDocument54 pagesBusiness PlanMohamed MansourNo ratings yet
- FlashDocument9 pagesFlashNAMELESS ASHENNo ratings yet
- Tommy Lee Elvin CVDocument2 pagesTommy Lee Elvin CVDaniel GutierrezNo ratings yet
- Introduction To UMLDocument33 pagesIntroduction To UMLsheheryarNo ratings yet
- Ssis Interview Questions and Answers PDF DownloadDocument2 pagesSsis Interview Questions and Answers PDF DownloadsreetkmNo ratings yet
- EJB 3.0 Final PreparedDocument243 pagesEJB 3.0 Final PreparedjayavardhankotiNo ratings yet
- Rashid Beach Resort Online Reservation SystemDocument13 pagesRashid Beach Resort Online Reservation SystemJohn Joseph PasawaNo ratings yet
- Oracle Fusion Applications Supply Chain Planning Upload: Calendar AssignmentsDocument6 pagesOracle Fusion Applications Supply Chain Planning Upload: Calendar AssignmentsgokulNo ratings yet
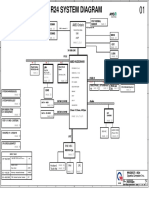
- R24 System Diagram: AMD OntarioDocument36 pagesR24 System Diagram: AMD OntarioRicardo SilvaNo ratings yet
- Studio 5000: Ordering GuideDocument3 pagesStudio 5000: Ordering Guideluis.chuquimiaNo ratings yet
- AI MidsDocument22 pagesAI MidsTalha MansoorNo ratings yet
- DX DiagDocument30 pagesDX DiagPepito Pepon PepoideNo ratings yet
- Furuno CBT InstructionsDocument2 pagesFuruno CBT InstructionsRakesh Kumar0% (1)
- Active DataGuard DML RedirectionDocument9 pagesActive DataGuard DML RedirectionSamuel AsmelashNo ratings yet
- IBM 3500 M2 User's GuideDocument126 pagesIBM 3500 M2 User's GuidekelvislonghiNo ratings yet
- TFM Important QuestionsDocument2 pagesTFM Important QuestionsvishwaNo ratings yet
- Me Project CRM SpringDocument15 pagesMe Project CRM SpringRameshNo ratings yet
- 928TCDocument116 pages928TCJuan David DiazNo ratings yet
- Designing Combinational Logic Circuits in Verilog - 2Document32 pagesDesigning Combinational Logic Circuits in Verilog - 2Vinh Hoang XuanNo ratings yet
- Article 1Document10 pagesArticle 1Fersan AngelesNo ratings yet
- Inteliscada Emea 2020Document12 pagesInteliscada Emea 2020Reggie HarvirNo ratings yet
- A Project Report Sorting VisualizerDocument12 pagesA Project Report Sorting VisualizerSumer DabbyNo ratings yet
- Voice Processing ToolDocument51 pagesVoice Processing Toolhamza salihNo ratings yet
- Live Agent Dev GuideDocument46 pagesLive Agent Dev GuidecyclerajaNo ratings yet
- C Language FundamentalsDocument215 pagesC Language Fundamentalsgaddipati vyshnaviNo ratings yet
- ml310 Vxworks QuickstartDocument32 pagesml310 Vxworks Quickstartjumbo_hydNo ratings yet