You might also like
- Peyre 2015 VegParamo, A Flora and Vegetation Database For The Andean Páramo PDFDocument8 pagesPeyre 2015 VegParamo, A Flora and Vegetation Database For The Andean Páramo PDFshofonNo ratings yet
- The Use of The Recession Index As An Indicator For Streamflow PDFDocument16 pagesThe Use of The Recession Index As An Indicator For Streamflow PDFshofonNo ratings yet
- Using Stable Isotope Tracers To Assess Hydrological Flow Path, Residence Times PDFDocument17 pagesUsing Stable Isotope Tracers To Assess Hydrological Flow Path, Residence Times PDFshofonNo ratings yet
- Rupp David E 2005 PDFDocument147 pagesRupp David E 2005 PDFshofonNo ratings yet
- Rutledge - 1998 PDFDocument52 pagesRutledge - 1998 PDFshofonNo ratings yet
- Optimization of Recession Parameters PDFDocument14 pagesOptimization of Recession Parameters PDFshofonNo ratings yet
- Rating Curve Method PDFDocument11 pagesRating Curve Method PDFshofonNo ratings yet
- Topcon GPT-9003A & FC-2200 (Robotic)Document4 pagesTopcon GPT-9003A & FC-2200 (Robotic)shofonNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Coursera Supply Chain Planning Week 4 Assignment AnswersDocument6 pagesCoursera Supply Chain Planning Week 4 Assignment AnswersMohammed Soliman MasliNo ratings yet
- SPOS-7 Help PDFDocument111 pagesSPOS-7 Help PDFМилен ДолапчиевNo ratings yet
- LINKERSDocument2 pagesLINKERSAnonymous 79okqFNo ratings yet
- Icen RegDocument23 pagesIcen RegfoobarNo ratings yet
- Chapter 009Document50 pagesChapter 009trannnenNo ratings yet
- MKTG490 McDONALDs Place-Distrib CaseDocument4 pagesMKTG490 McDONALDs Place-Distrib CaseMarryRose Dela Torre FerrancoNo ratings yet
- Gann Cycles Introduction 182Document5 pagesGann Cycles Introduction 182HazemSamir80% (5)
- 05 ForecastingDocument76 pages05 Forecastingdukomaniac100% (1)
- MGSC 368 A Manufacturing Firm Has Four Production DepartmentsDocument5 pagesMGSC 368 A Manufacturing Firm Has Four Production DepartmentsDoreenNo ratings yet
- WeatherDocument9 pagesWeatherBlessmore ChitanhaNo ratings yet
- Chapter 04 - Indian ClimateDocument25 pagesChapter 04 - Indian ClimateMega No01100% (1)
- Data Science in Weather ForecastingDocument10 pagesData Science in Weather ForecastinghimanshuNo ratings yet
- Unit 1 Nature of Mathematics Lesson 1 Mathematics For Our WorldDocument6 pagesUnit 1 Nature of Mathematics Lesson 1 Mathematics For Our WorldChris Esterioso NotarionNo ratings yet
- Tugas Kelas Ix A, B, C Part 2Document6 pagesTugas Kelas Ix A, B, C Part 2qoisalqarniNo ratings yet
- Training For Wisdom With The Illeist Diary MethodDocument25 pagesTraining For Wisdom With The Illeist Diary MethodMike McDNo ratings yet
- Mazars Study C Suite BarometerDocument26 pagesMazars Study C Suite BarometerMircea MerticariuNo ratings yet
- Advanced Unit 04bDocument2 pagesAdvanced Unit 04bfabidrNo ratings yet
- Forecasting With R NotesDocument66 pagesForecasting With R NotesAna Luíza SouzaNo ratings yet
- Science ProbeDocument258 pagesScience ProbeoakesmNo ratings yet
- Weather Monitoring SystemDocument67 pagesWeather Monitoring SystemAKOMOLEDE SUNDAY100% (1)
- Practice Problem 1 - Shah Alam Palm Oil Company - Week 2 Practice Problems - CTLDocument6 pagesPractice Problem 1 - Shah Alam Palm Oil Company - Week 2 Practice Problems - CTLSrinivasa RaghavanNo ratings yet
- Geography Assignment - WindsDocument10 pagesGeography Assignment - WindsJasonKoylassNo ratings yet
- StoryWorks Welcome To The Future 2 PDFDocument5 pagesStoryWorks Welcome To The Future 2 PDFColinNo ratings yet
- Rock Failure Mechanisms of Flame-Jet Thermal Spauation Drilling Theory and Experimental TestingDocument19 pagesRock Failure Mechanisms of Flame-Jet Thermal Spauation Drilling Theory and Experimental TestingLazi PengiNo ratings yet
- A Review and Analysis of The Mahalanobis Taguchi System PDFDocument16 pagesA Review and Analysis of The Mahalanobis Taguchi System PDFcualercowNo ratings yet
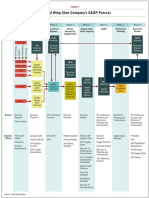
- The Red Wing Shoe Company's S&OP Process: Phase 1 Phase 3 Phase 5 Phase 7Document1 pageThe Red Wing Shoe Company's S&OP Process: Phase 1 Phase 3 Phase 5 Phase 7Uchenna 'Bonex' OgbonnaNo ratings yet
- ShabaDocument36 pagesShabaSohail MehmoodNo ratings yet
- Chapter 13 - Thunderstorms - January 2015Document15 pagesChapter 13 - Thunderstorms - January 2015MustaphaNo ratings yet
- Statement of The ProblemDocument3 pagesStatement of The ProblemSophia MilletNo ratings yet
- 09b PDFDocument17 pages09b PDFrazvan04061986No ratings yet