You might also like
- MECH 370 Final Exam: Modeling, Simulation and Control SystemsDocument4 pagesMECH 370 Final Exam: Modeling, Simulation and Control SystemsCamila MayorgaNo ratings yet
- Modeling and Simulation of A Series Resonant InverterDocument6 pagesModeling and Simulation of A Series Resonant InverterkaaisNo ratings yet
- Laplace and Fourier Transform Analysis of Electric CircuitsDocument7 pagesLaplace and Fourier Transform Analysis of Electric CircuitsSwasti RanjanNo ratings yet
- College of Engineering Department of Electrical Engineering: Prince Sattam Bin Abdulaziz UniversityDocument31 pagesCollege of Engineering Department of Electrical Engineering: Prince Sattam Bin Abdulaziz UniversityFawzi RadwanNo ratings yet
- 2-Mathematical Models of SystemsDocument42 pages2-Mathematical Models of SystemsKeiko AzizahNo ratings yet
- Sliding Mode Control Based On Fractional Order Calculus For DC-DC ConvertersDocument15 pagesSliding Mode Control Based On Fractional Order Calculus For DC-DC ConverterssathishNo ratings yet
- Chapter 2 - v1sDocument97 pagesChapter 2 - v1sKiet Kuat KongNo ratings yet
- Chapter 2 Mathematical Models of ControlDocument36 pagesChapter 2 Mathematical Models of Controlherber_28No ratings yet
- Report On Magnetic Levitation System ModellingDocument6 pagesReport On Magnetic Levitation System ModellingSteve Goke AyeniNo ratings yet
- UNIT III-1Document11 pagesUNIT III-1dr.omprakash.itNo ratings yet
- Final Exam - SampleDocument4 pagesFinal Exam - SampleAhmed MashhoorNo ratings yet
- CHAPTER 2: System Modeling in Frequency DomainDocument98 pagesCHAPTER 2: System Modeling in Frequency DomainSanji KarunaNo ratings yet
- Mathematical Models of Control SystemsDocument44 pagesMathematical Models of Control SystemsQuốc KhánhNo ratings yet
- IntroMDsimulations WGwebinar 01nov2017Document76 pagesIntroMDsimulations WGwebinar 01nov2017Rizal SinagaNo ratings yet
- Question Bank - NDocument3 pagesQuestion Bank - NPankaj DabadeNo ratings yet
- Laplace TransformDocument14 pagesLaplace TransformDeri RamadhanNo ratings yet
- Ee202laplacetransform PDFDocument85 pagesEe202laplacetransform PDFFairusabdrNo ratings yet
- Transfer Function Modeling For The Buck Converter: Sanda Lefteriu Cécile LabarreDocument4 pagesTransfer Function Modeling For The Buck Converter: Sanda Lefteriu Cécile Labarre1balamanianNo ratings yet
- Analysis and Applications of Laplace/Fourier Transformations in Electric CircuitDocument8 pagesAnalysis and Applications of Laplace/Fourier Transformations in Electric Circuitastro trumpNo ratings yet
- Optimal Control of DC Motor Using Performance Index of EnergyDocument5 pagesOptimal Control of DC Motor Using Performance Index of EnergyAlionNo ratings yet
- A Study On The Inrush Current Phenomena in Transformer SubstationsDocument9 pagesA Study On The Inrush Current Phenomena in Transformer SubstationsFirdaus AzmiNo ratings yet
- DoxsDocument14 pagesDoxsTALHA SALEEMNo ratings yet
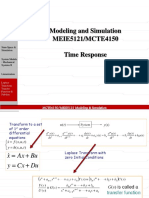
- Modeling and Simulation MEIE5121/MCTE4150 Time ResponseDocument31 pagesModeling and Simulation MEIE5121/MCTE4150 Time ResponsehazaaNo ratings yet
- Project Fall2015Document5 pagesProject Fall2015AlvinNo ratings yet
- EE207 Problem set 1 IIT ROPARDocument7 pagesEE207 Problem set 1 IIT ROPARsumithasreekumar5No ratings yet
- Laplace Transforms and Its Wide-Ranging Engineering ApplicationsDocument4 pagesLaplace Transforms and Its Wide-Ranging Engineering ApplicationsAhmed S. El-MoghazyNo ratings yet
- Question Bank Unit-I: A A TFDocument8 pagesQuestion Bank Unit-I: A A TFSrinivasNo ratings yet
- MITRES 6-010S13 Chap03 PDFDocument47 pagesMITRES 6-010S13 Chap03 PDFSrinyantu ChatterjeeNo ratings yet
- Unit-Vi: Mathematics-II (7HC16)Document32 pagesUnit-Vi: Mathematics-II (7HC16)Kola KeerthanaNo ratings yet
- The Laplace TransformsDocument61 pagesThe Laplace TransformsLouie Shaolin Lungao100% (1)
- AlexanderCh16final R1Document19 pagesAlexanderCh16final R1utpNo ratings yet
- Ch2 Modeling in Frequency DomainDocument66 pagesCh2 Modeling in Frequency DomainWei-Hsin CheinNo ratings yet
- On Frequency Domain Criterion of FiniteDocument8 pagesOn Frequency Domain Criterion of FiniteAlexander VoltaNo ratings yet
- DC Motor Controller DesignDocument6 pagesDC Motor Controller Designudit mimaniNo ratings yet
- Rusu Marius Sebastian 2Document6 pagesRusu Marius Sebastian 2Mavy GreenNo ratings yet
- Clase 02 Modelado de Sistemas de Control PDFDocument40 pagesClase 02 Modelado de Sistemas de Control PDFmiscaelNo ratings yet
- EE207 Problem Set 1Document2 pagesEE207 Problem Set 1Rishabh AgarwalNo ratings yet
- Process Control Transfer FunctionsDocument16 pagesProcess Control Transfer FunctionsAnonymous 0zrCNQNo ratings yet
- Circuit Analysis in S-DomainDocument22 pagesCircuit Analysis in S-Domainshreyas_stinsonNo ratings yet
- State-Space Modeling of Control SystemsDocument11 pagesState-Space Modeling of Control SystemsSyed Hussain Akbar MosviNo ratings yet
- 390-Article Text-738-1-10-20200709Document6 pages390-Article Text-738-1-10-20200709EsmfNo ratings yet
- Online Control Lecture #2Document33 pagesOnline Control Lecture #2Noor GamingNo ratings yet
- Petráš, I. 2009 Fractional-Order Feedback Control of A DC Motor Journal of ElectricalDocument12 pagesPetráš, I. 2009 Fractional-Order Feedback Control of A DC Motor Journal of ElectricalcharifNo ratings yet
- (9-11) Introduction To Laplace TransformDocument3 pages(9-11) Introduction To Laplace Transformpratiksha nagdawneNo ratings yet
- Lab 1Document2 pagesLab 1Zahin Tazwar 1921486642No ratings yet
- Teorema PrigogineDocument8 pagesTeorema PrigogineGijacis KhasengNo ratings yet
- Lab Notes on Transfer Functions and the Laplace TransformationDocument11 pagesLab Notes on Transfer Functions and the Laplace TransformationDerrick Maatla MoadiNo ratings yet
- Variable-Order Fractal-Fractional Time Delay Equations With Power, Exponential and Mittag-Leffler Laws and Their Numerical SolutionsDocument25 pagesVariable-Order Fractal-Fractional Time Delay Equations With Power, Exponential and Mittag-Leffler Laws and Their Numerical SolutionsManuel MarinNo ratings yet
- Fourier Transforms Chapter EE017Document5 pagesFourier Transforms Chapter EE017Bader Al-SabriNo ratings yet
- Assignment 1Document4 pagesAssignment 1Ashish KushwahaNo ratings yet
- Mathematical ModelDocument54 pagesMathematical ModelLEMANG GAMINGNo ratings yet
- Nonlinear Dynamic Behavior of RC Buildings Against Accelerograms With Partial Compatible SpectrumDocument8 pagesNonlinear Dynamic Behavior of RC Buildings Against Accelerograms With Partial Compatible SpectrumderbalNo ratings yet
- EMTH202-Lecture 13 (20-03-2023)Document25 pagesEMTH202-Lecture 13 (20-03-2023)Naledi KetlogetsweNo ratings yet
- Energies 10 00799 v2Document14 pagesEnergies 10 00799 v2balasubramani krishnamurthiNo ratings yet
- IC6701 May 18 With KeyDocument14 pagesIC6701 May 18 With KeyAnonymous yO7rcec6vuNo ratings yet
- Voltage Tracking of A Multi-Input InterleavedDocument4 pagesVoltage Tracking of A Multi-Input InterleavedREYES APOLONIO CASTRO CORRALNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Topics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationFrom EverandTopics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationNo ratings yet
- PeepalPol Manager's App PDFDocument12 pagesPeepalPol Manager's App PDFSupriya AnandNo ratings yet
- PeepalPol Manager's App PDFDocument12 pagesPeepalPol Manager's App PDFSupriya AnandNo ratings yet
- Math (Trapezoidal Rule For Area Calculation)Document16 pagesMath (Trapezoidal Rule For Area Calculation)haqjmiNo ratings yet
- Seating Arrangement For B.Tech. Electives MA2010, MA2020, MA2031, MA2040 & MA2130 QUIZ - 2 Exams (JUL - NOV 2018) - Reg PDFDocument2 pagesSeating Arrangement For B.Tech. Electives MA2010, MA2020, MA2031, MA2040 & MA2130 QUIZ - 2 Exams (JUL - NOV 2018) - Reg PDFSupriya AnandNo ratings yet
- Solution Manual 3rd Ed. Metal Forming: Mechanics and Metallurgy CHAPTER 1-3Document11 pagesSolution Manual 3rd Ed. Metal Forming: Mechanics and Metallurgy CHAPTER 1-3Nadia Zukry83% (6)
- Seating Arrangement For B.Tech. Electives MA2010, MA2020, MA2031, MA2040 & MA2130 QUIZ - 2 Exams (JUL - NOV 2018) - Reg PDFDocument2 pagesSeating Arrangement For B.Tech. Electives MA2010, MA2020, MA2031, MA2040 & MA2130 QUIZ - 2 Exams (JUL - NOV 2018) - Reg PDFSupriya AnandNo ratings yet
- Module 4 Lecture 1 Final PDFDocument8 pagesModule 4 Lecture 1 Final PDFAshish ManwarNo ratings yet
- A Brief Review of Laplace TransformsDocument10 pagesA Brief Review of Laplace TransformsSupriya AnandNo ratings yet
- Heat TreatmentDocument4 pagesHeat TreatmentSupriya AnandNo ratings yet
- Composite MaterialsDocument31 pagesComposite MaterialsSupriya AnandNo ratings yet