You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- LSQ5 Man-0964 V3.1.0 enDocument48 pagesLSQ5 Man-0964 V3.1.0 enDiego Mondragon100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- B0193ax1 AbDocument822 pagesB0193ax1 Abjavier_khan100% (6)
- Saep 350 PDFDocument15 pagesSaep 350 PDFRami Elloumi100% (1)
- Decca TreeDocument4 pagesDecca Treeiuridicaprima4No ratings yet
- Procedure For Electrical WorksDocument13 pagesProcedure For Electrical WorksBenadict JoshuaNo ratings yet
- Account Closure Form Citi BankDocument1 pageAccount Closure Form Citi BankSarfaraz AhmedNo ratings yet
- 07 - Sistema EletricoDocument86 pages07 - Sistema EletricoFabio MacielNo ratings yet
- Shree+Guru+Gita CompletoDocument18 pagesShree+Guru+Gita CompletoJesús Lagunas PintorNo ratings yet
- Shiv RavanDocument13 pagesShiv Ravanharsh19021996No ratings yet
- Ram NaamDocument6 pagesRam Naamharsh19021996No ratings yet
- DeogharDocument13 pagesDeogharharsh19021996No ratings yet
- 09:30 Am Sahasra LingarchanaDocument1 page09:30 Am Sahasra Lingarchanaharsh19021996No ratings yet
- KrishnaDocument13 pagesKrishnaharsh19021996No ratings yet
- Rbi 44Document3 pagesRbi 44harsh19021996No ratings yet
- Hyderabad Rent SheetDocument4 pagesHyderabad Rent Sheetharsh19021996No ratings yet
- Rbi 11Document2 pagesRbi 11harsh19021996No ratings yet
- Upload 1Document6 pagesUpload 1harsh19021996No ratings yet
- Upload 2Document5 pagesUpload 2harsh19021996No ratings yet
- State Wise Quarantine Regulations: Dhs - Idspdatam@hry - Nic.inDocument10 pagesState Wise Quarantine Regulations: Dhs - Idspdatam@hry - Nic.inAmit PaulNo ratings yet
- Rbi 55Document2 pagesRbi 55harsh19021996No ratings yet
- RBI Interview 1.1Document1 pageRBI Interview 1.1harsh19021996No ratings yet
- Rbi 22Document2 pagesRbi 22harsh19021996No ratings yet
- Rbi 33Document4 pagesRbi 33harsh19021996No ratings yet
- Interview ExperienceDocument1 pageInterview Experienceharsh19021996No ratings yet
- RBI Interview 3.1Document1 pageRBI Interview 3.1harsh19021996No ratings yet
- RBI Interview 4.1Document2 pagesRBI Interview 4.1harsh19021996No ratings yet
- Upload 5Document6 pagesUpload 5harsh19021996No ratings yet
- Upload 4Document6 pagesUpload 4harsh19021996No ratings yet
- Upload 3Document5 pagesUpload 3harsh19021996No ratings yet
- Rbi 11Document2 pagesRbi 11harsh19021996No ratings yet
- RBI Interview 2.1Document1 pageRBI Interview 2.1harsh19021996No ratings yet
- Interview ExperienceDocument1 pageInterview Experienceharsh19021996No ratings yet
- Upload 1Document6 pagesUpload 1harsh19021996No ratings yet
- Interview Experience 2Document2 pagesInterview Experience 2harsh19021996No ratings yet
- Interview Experience 4Document3 pagesInterview Experience 4harsh19021996No ratings yet
- Interview Experience 3Document2 pagesInterview Experience 3harsh19021996No ratings yet
- Fiber Optic Communications Fiber Optic Communications: EE4367 Telecom. Switching & TransmissionDocument25 pagesFiber Optic Communications Fiber Optic Communications: EE4367 Telecom. Switching & TransmissionnhatvpNo ratings yet
- Slva 714 DDocument24 pagesSlva 714 DMarcio WjbNo ratings yet
- 854DG85VTEXYDocument2 pages854DG85VTEXYfaapctbaNo ratings yet
- Boschrexroth Re29993Document4 pagesBoschrexroth Re29993Service - Anda Hydraulics Asia Pte LtdNo ratings yet
- Operation and Maintenance Instructions: Medipoint 26 Alarm System Local AlarmDocument22 pagesOperation and Maintenance Instructions: Medipoint 26 Alarm System Local AlarmShoaib KhanNo ratings yet
- SRT 1F Equipment DetailsDocument8 pagesSRT 1F Equipment Detailsjcardenas55No ratings yet
- NITROX 12152025KW 3Ph 5G Updated SmallDocument24 pagesNITROX 12152025KW 3Ph 5G Updated SmallAbdulrehman SoomroNo ratings yet
- GauravDocument26 pagesGauravgauravNo ratings yet
- 1LA7096-4AA11 DatasheetDocument1 page1LA7096-4AA11 DatasheetHien DucNo ratings yet
- 24.71.00007 ATU X CrossesDocument14 pages24.71.00007 ATU X CrossesTitoNo ratings yet
- Balanza SpiderDocument333 pagesBalanza SpiderMadison MadisonNo ratings yet
- Approval Sheet: Customer ManufacturerDocument7 pagesApproval Sheet: Customer ManufacturerypadillaNo ratings yet
- Metrum PQ Controller DB System 4page Eng R24 WebbDocument4 pagesMetrum PQ Controller DB System 4page Eng R24 WebbRAJESH KUMARNo ratings yet
- MCP L3DDocument102 pagesMCP L3Ddo phuongNo ratings yet
- Ee321 ObjectivesDocument3 pagesEe321 ObjectivesJomar DadorNo ratings yet
- Geddes Directivity PDFDocument14 pagesGeddes Directivity PDFGorky GurkyNo ratings yet
- 09072310301310Document18 pages09072310301310Walker BautistaNo ratings yet
- Sky-642 User Manual Ed.1-FinalDocument102 pagesSky-642 User Manual Ed.1-FinalMisha KornevNo ratings yet
- Xaar Datasheet ProtonDocument2 pagesXaar Datasheet ProtonRicardo AmezcuaNo ratings yet
- AE340 - Architectural Illumination and Electrical System NotesDocument11 pagesAE340 - Architectural Illumination and Electrical System Noteschloe2197No ratings yet
- Ds 11011Document3 pagesDs 11011Walther EstevezNo ratings yet
- TV Out With ArduinoDocument5 pagesTV Out With ArduinoswoneraNo ratings yet
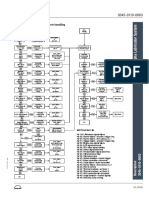
- 63 Sequence Diagram For Alarm HandlingDocument1 page63 Sequence Diagram For Alarm HandlingNick SkiadasNo ratings yet
- COA NOTESmod118EC35-2-90Document89 pagesCOA NOTESmod118EC35-2-90BOBAN05No ratings yet